 电子发烧友App
电子发烧友App


煤炭行业作为我国重要的传统能源行业,是我国国民经济的重要组成部分,其智能化建设直接关系我国国民经济和社会智能化的进程。煤矿智能化是煤炭工业高质量发展的核心,对提升煤矿安全生产水平、改善生产效率、保障稳定供应等具有重要意义。
华为将人工智能、云计算、车联网、智能驾驶、高精地图等技术,与现代煤炭开采深度融合,实现了露天矿无人驾驶矿车采-运-排全流程持续作业,并实现了商用部署。这将大幅提升矿山生产作业安全性、避免人身伤亡事故,实现从传统刚性作业调度向智能化灵活调度转变,同时有效解决矿车驾驶员招工难、运营成本高、生产效率提升难等问题。
露天矿无人驾驶实现规模化商用,
需做足技术储备
目前,我国L4级露天矿无人驾驶技术在多地已经进入了测试和试商用阶段。
尽管如此,露天矿无人驾驶从小规模测试,向全场景、全流程延伸,走向真正的无人化(安全员下车)和7X24可持续作业的规模化商用,依旧面临诸多挑战:
1 持续作业需考虑全业务流程场景
在采-运-排核心流程之外的场景中,如车辆加油/充电、辅助车辆混行、全路段避障、避炮等,也要具备无人驾驶能力。场景复杂度大幅提升,自动驾驶长尾问题愈加显著,算法高效迭代成为基本需求。
2 不同的工况特点会对技术的可靠性和通用性带来显著挑战。
相对于充分整备的测试环境道路,无人驾驶作业系统和车辆要能有效应对异形排土场、综合调度、陡坡、急弯、狭窄采掘作业平台等“不大理想”的作业环境。
3 大规模生产作业,对无人驾驶作业系统提出更高要求。
随作业车辆数量、作业规模和效率的提升,采掘作业面变化速度加快,对作业任务调度、高精地图动态更新、作业点位动态分配、精准路径规划、防止路径冲突等都提出了更高的要求。
4 运维运营在商用阶段容易成为技术短板。
在商用阶段,拥有一套支持车辆状态监控,故障预警、且具备故障快速定界定位,以及运营分析能力的智能运维运营平台,是非常必要的。
基于车路云协同,
华为打造露天矿无人驾驶商用解决方案
实现露天矿无人驾驶作业不仅要解决自动驾驶问题,还需要打通无人驾驶车辆和作业生产系统,形成完整的无人化生产作业体系。华为融合智能驾驶和ICT技术解决方案,联合伙伴基于车、路、云协同打造了露天矿无人驾驶商用解决方案:
车端:
华为和车辆制造企业合作完成车辆(机械)智能化改装,并提供智能驾驶计算平台MDC、高性能车规级激光雷达、毫米波雷达和摄像头,以及矿车自动驾驶算法。
路侧: 通过路侧基础设施和RTK基站实现精准组合定位和V2X超视距感知。 云端:
通过矿山业务管理系统、车队调度管理系统和高精度动态业务地图服务实现多车、多编组无人化作业的统筹调度;通过自动驾驶监管运营服务提供智能化车辆运维和运营分析能力;通过自动驾驶云服务,可以基于车辆端传感器数据实现自动驾驶算法的持续优化和迭代。
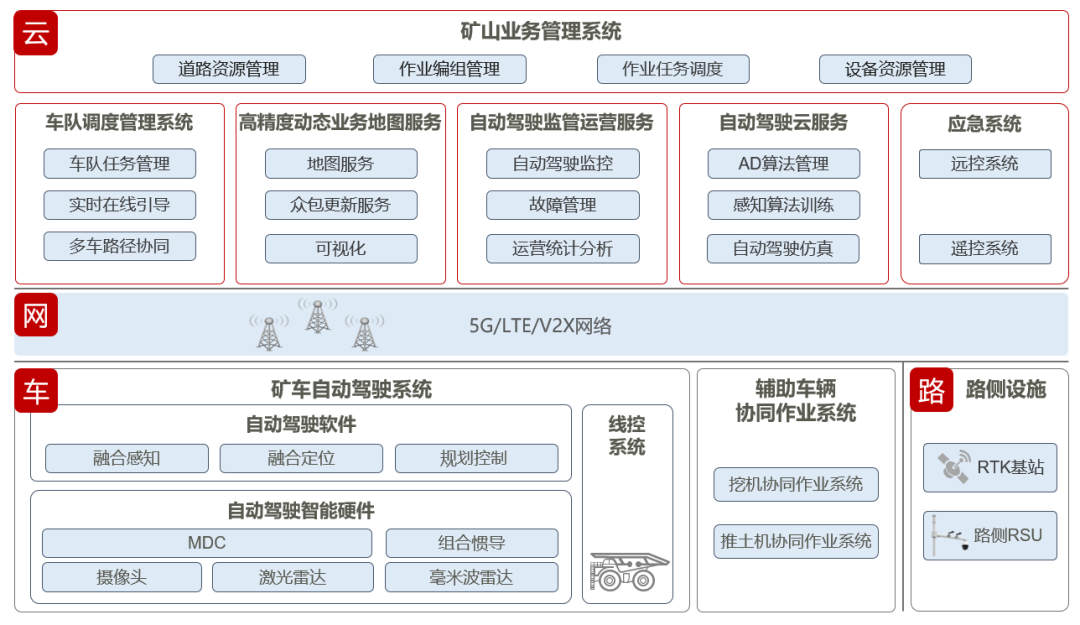
华为露天矿无人驾驶解决方案总体架构
基于车路云协同的露天矿无人驾驶解决方案将带来三大价值:
01 实现端到端无人化高效作业
打造“云上大脑”,实现多车统筹调度、全场景开展无人化作业。
02 提供更高的安全性和可靠性
基于“上帝视角”在规划层面避免路径冲突和多车死锁,通过路侧设施实现全局态势感知,改善盲区障碍物检测能力。
03 可快速实现自动驾驶算法的持续迭代
随车辆持续运行,可基于传感器采集的数据,在云端高效开展算法优化。
华为露天矿无人驾驶解决方案的五大亮点
一 提升矿山特有场景的感知能力 在露天矿无人驾驶作业过程中,感知算法面临诸多挑战:
1、沙尘环境下实现落石等小目标的精准检测;
2、矿山挡墙与地面边界精准语义分割挑战较大;
3、目标检测训练样本量少,训练、学习和模型泛化难。
华为通过特有的技术,能在小样本数据量的情况下,完成感知模型的训练,并实现了很好的泛化。华为的感知算法具有极强的环境适应能力,提升了在不同作业环境下技术的可靠性和通用性。这大大降低了数据采集的要求和算法训练的难度,提升了沙尘环境下目标精准检测的能力,具备远距离人车识别、挡墙边界和高度精准识别、地面起伏检测、土砾或小石块(10cm*10cm@20米)检测等,提升行驶安全性。
二 提供全工况下精细化的车辆规控能力
华为可在各种工况场景下实现“一车一模型”的精细化的规划控制能力,实现高速巡航、精准停车、主动避障、安全跟车、直角弯、重载长坡等场景。针对不同车辆,不同载重状态,系统会开展车辆响应的一致性检测,以提升规控算法在不同工况下的鲁棒性。
在采装区,可以在25米的狭窄采装位实现作业,并基于车铲协同实现精准对位停车。在运输阶段,基于车云协同,可动态完成矿山道路全路段的平整度检测,并引导车辆在颠簸路面主动降速。
此外,车辆还能自主跨越或躲避坑洼、落石,并实现车辙均匀碾压。在排土区,能应对不规则的异形排土场,实现排土位科学规划和精准停靠,此外还具备排土位残留渣土和排土挡墙断裂检测预警能力,车辆会主动避开并上报云端调度推土机完成挡墙修复。
三 打造云端大脑,实现多车作业智能调度、提升矿山特有场景的感知能力
为实现生产作业全过程的无人化,华为打造云端大脑,提供作业任务下发、作业区域分配、编组安排、待装位/排土位规划、车铲协同作业等能力,除了这些基本能力外,还具备以下优势:
01
云端可基于车端感知数据众包,
实现高精度业务地图的分钟级快速更新。
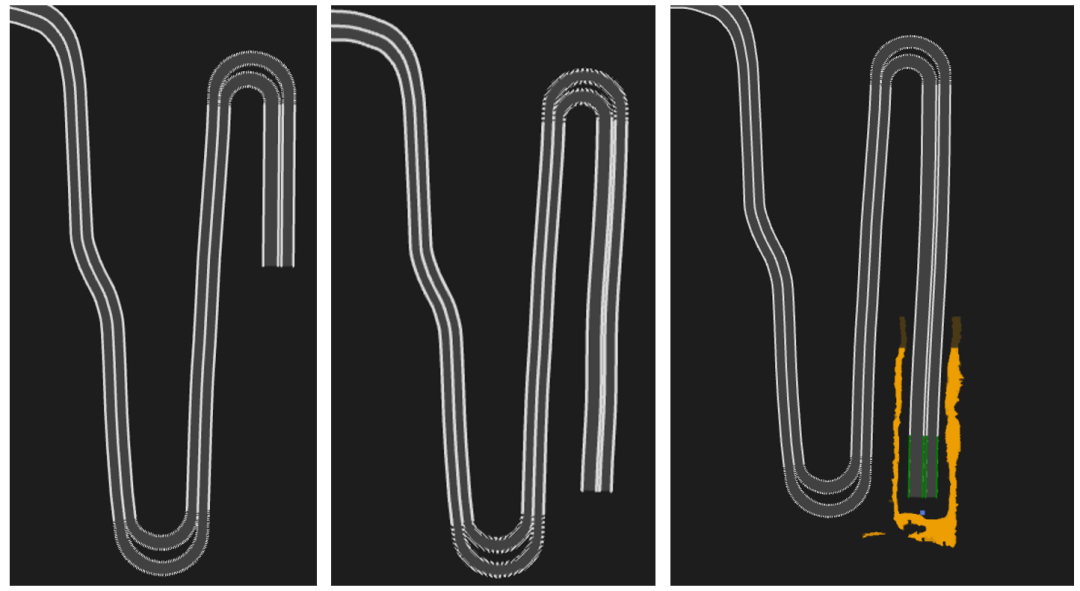
矿区道路高精地图动态更新
作业点位以及排土线可以自动更新,保障采装区和排土区的精准对位。矿区道路的高精地图也能跟随作业点位的推进和变化,在达到设定的距离阈值时实现自动更新。
02 支持均衡排土,也可支持异形排土场
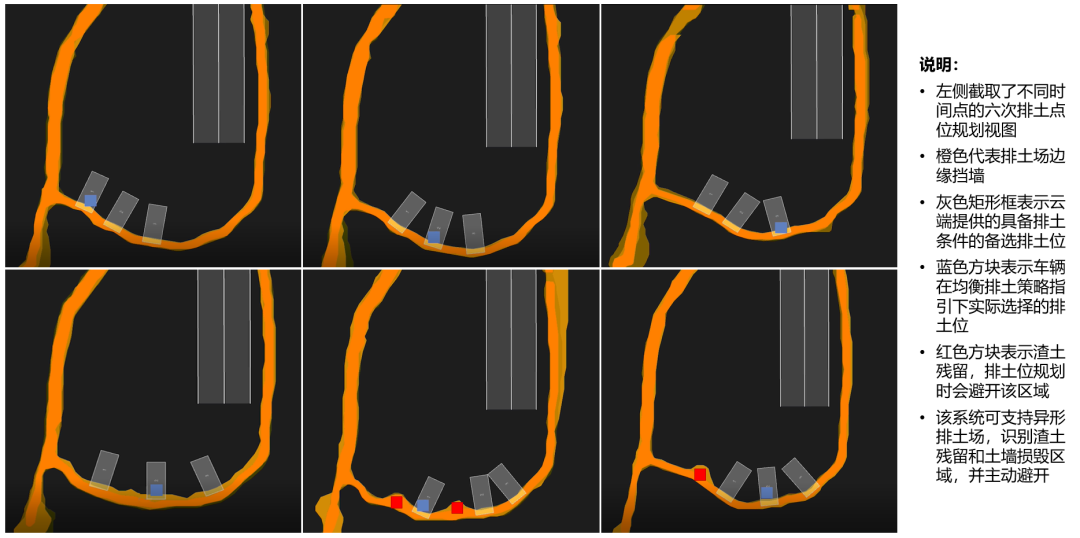
云端可以依据挡墙边缘自动计算排土位
(支持均衡排土和异形排土场)
03
通过长短路径精准规划
提升多车协同作业的安全性
长路径为车辆指引完整的作业路径,短路径规划则是云端为避免多车轨迹冲突而提供的动态指引,大幅提升了无人驾驶的安全性。
04
支持全场景作业调度能力,
提升商用运营阶段系统可用性
可支持避炮、加油等作业场景;同时支持灵活的手动调度,以快速应对各类突发情况;能应对车端失去定位信息或通讯断连等特殊情况的处理。
05
基于车路云协同,
可实现车辆超视距感知和风险预警
对于道路上的静态物体,车端会向云端上报感知信息,云端汇聚多车感知信息后会形成风险预警,提示其他车辆进行避让。
四
提供自动驾驶监管运营服务,
为常态化作业提供基础保障
在商用阶段,智能化运维运营是保障常态化作业的基础能力。华为在云端构建自动驾驶监管运营服务,提供以下能力:
1:提供自动驾驶车辆状态监管能力。
2:支持车辆健康自检、故障告警、故障智能诊断和分析。
3:提供矿山作业运营数据智能分析能力。
五 基于车端数据,
实现自动驾驶算法持续优化
为实现算法的高效迭代,华为自动驾驶云服务提供了一条完整高效的开发、训练和评测工具链。包括:
1:为模型训练提供自动化数据流水线服务能力,覆盖从数据采集、数据回放、智能化难例挖掘、智能标注、生成增量数据集,到模型训练整个开发过程。
2:提供自动驾驶规控算法云仿真平台,支持矿车动力学仿真,融合了功能安全分析,可加快自驾算法场景迁移,提升矿山场景规控算法迭代效率。
3:积累了高质量的矿山特有场景训练数据集和仿真场景库。
4:基于云端海量资源,模型训练和仿真测试(日行千万公里)非常高效。
从试商用到常态化运营,露天矿无人驾驶系统需要经得起严苛环境和复杂工况的千锤百炼。在技术创新和应用的道路上没有一蹴而就,唯有持之以恒才能厚积薄发,华为砥志研思、锐意进取,与煤矿业主和行业伙伴共同推动无人驾驶作业的规模化、常态化商业应用,为打造安全、高效、可靠的智慧矿山奠定坚实基础。
编辑:黄飞


























 工商网监
工商网监
评论