 电子发烧友App
电子发烧友App


自动驾驶运用了多种传感器(超声波雷达、毫米波雷达、智能摄像头、高清/标清摄像头、激光雷达等),各类不同的硬件传感器,对于传感器探测性能提出了不同程度的要求,而对于探测性能影响尤为重要的一点就是传感器的布置位置和布置方式。
Part.01 高级驾驶辅助系统传感器介绍
高级驾驶辅助系统(Advanced Driving Assistance System,ADAS)是利用传感器,在汽车行驶过程中实时感应周围的环境,收集数据,感知融合并对感知数据进行决策分析,最后对车辆进行控制和对驾驶员进行预警。 摄像头能获取包括物体颜色、外形、材质等丰富的环境信息,并且2D计算机视觉已取得很多进展,该领域有许多先进的算法用于信号灯检测、物体分类等。毫米波雷达能够获取精准的距离信息,穿透能力强,能够抵抗天气和环境变化的影响,可实现远距离感知探测。 目前量产的自动驾驶汽车上的传感器种类有4种,数量为22个(表1)。 表1 高级辅助驾驶系统传感器分类

1.1 前视智能摄像头
常用有单、双和三目,主要应用于中远距离场景,能识别清晰的车道线、交通标识、障碍物和行人,但对光照、天气等条件很敏感,而且需要复杂的算法支持,对处理器的要求也比较高。
1.2 毫米波雷达
主要有用于中短测距的24 GHz雷达和长测距的77 GHz雷达2种。毫米波雷达可有效提取景深及速度信息,识别障碍物,有一定的穿透雾、烟和灰尘的能力,但在环境障碍物复杂的情况下,由于毫米波依靠声波定位,声波出现漫反射,导致漏检率和误差率比较高。
1.3 超声波雷达
主要应用于短距离场景下,发送超声波与接收反射超声波信号,并把探测结果发送给控制器。超声波的能量消耗较缓慢,穿透性强,测距的方法简单,成本低。但是它在速度很高情况下测量距离有一定的局限性,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较的弱,影响测量精度。但是,在短距离测量中,超声波测距传感器具有非常大的优势。
1.4 环视摄像头
主要应用于短距离场景,可识别障碍物,但对光照、天气等外在条件很敏感,技术成熟,价格低廉。随着技术的不断发展进步,摄像头的像素也在逐步提升,从最开始的30万像素,提升到目前的100万像素,未来3年内200万像素的摄像头将会普及。
Part.02 传感器实现功能配置组合
高级驾驶辅助系统的不同传感器之间的组合,可以实现不同的功能,上述介绍的22个传感器全部搭载到整车,可实现ADASL1/L2/L3,下面介绍详细的子功能。
2.1 前向智能摄像头和前向毫米波雷达
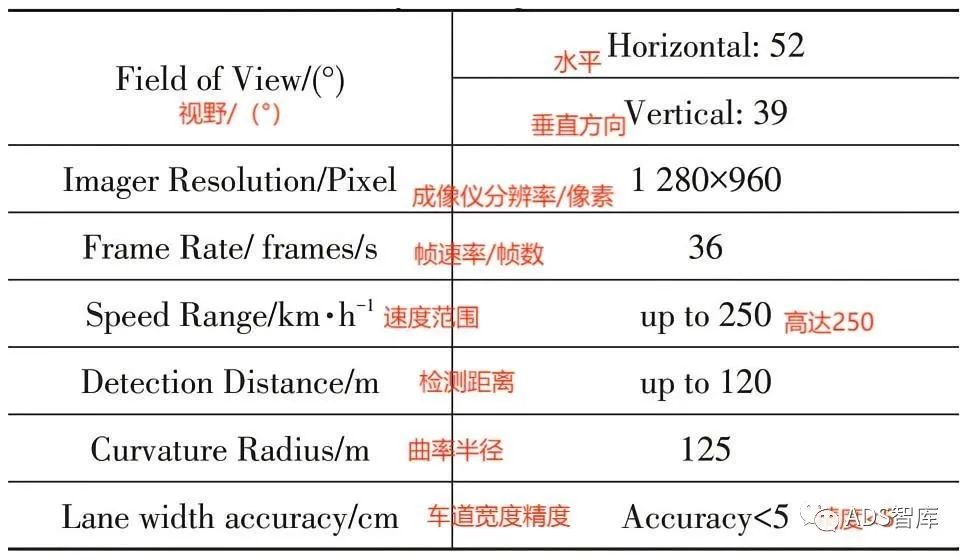
前向智能摄像头实现AEB-C(自动紧急制动-车)、LDW(车道偏离预警)、LKA(车道保持辅助)、TSR(交通标志识别),实现L1级驾驶辅助。道路实际情况探测精准(如车道线、隧道、匝道、限速等),但是距离探测不精准。其代表性能参数见表2。 表2 Mobileye EYEQ3部分性能参数
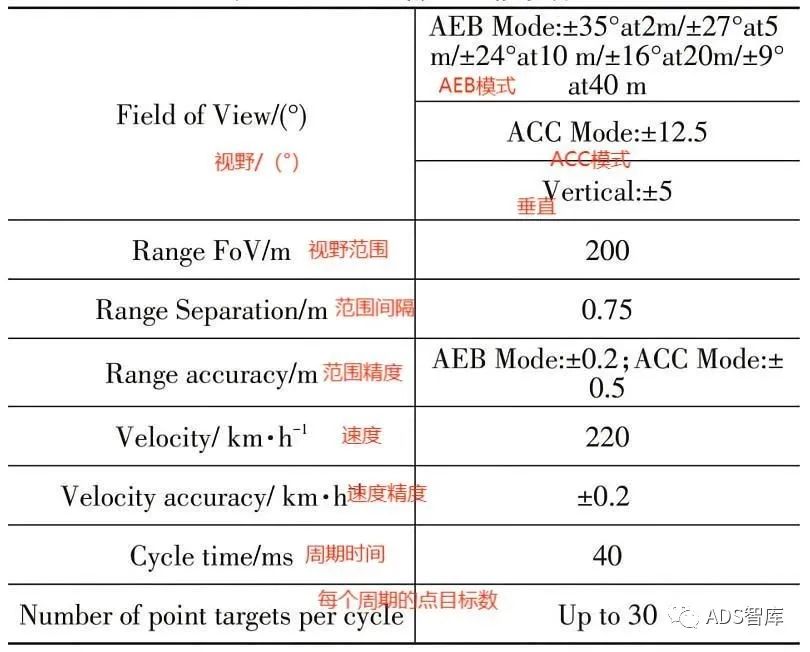
前向毫米波雷达(77 GHz)实现ACC(自适应巡航)、AEB-C(自动紧急制动-车)、FCW(前向碰撞预警),实现L1级驾驶辅助。距离探测精准,但是无法预测实际情况(如车道线、隧道、匝道、限速等)。其代表性能参数见表3。 表3 AC1000部分性能参数
前向智能摄像头和前向毫米波雷达融合,实现ACC、AEB-C/P自动紧急制动-车/人)、LDW、LKA、TSR、TJA(交通拥堵辅助)、ICA(智能巡航辅助),能实现L2级驾驶辅助(图1)。距离和道路信息均是融合后的数据,探测精准。单雷达、单摄像头以及融合方案的对比见表4。 表4 单雷达、单摄像头以及融合方案的对比

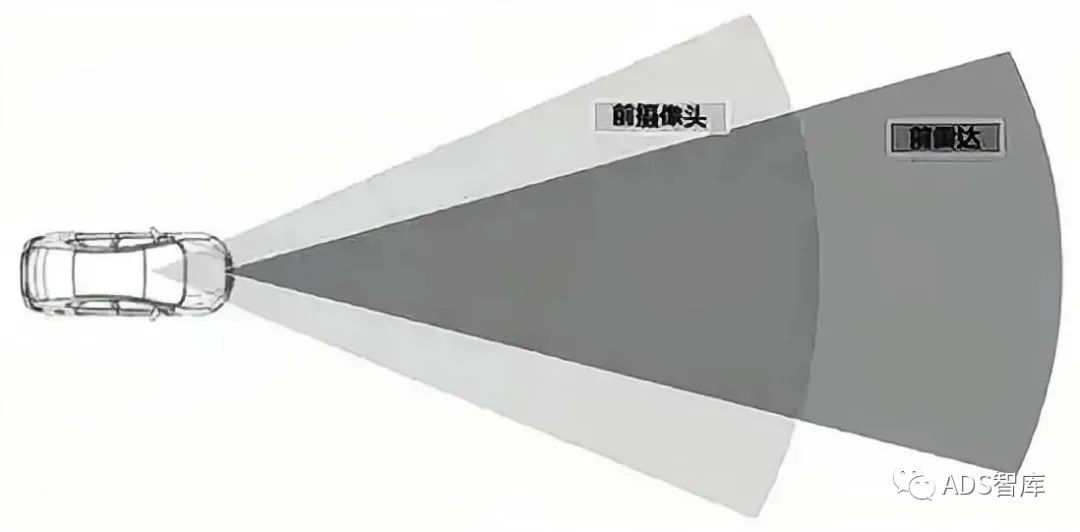
图1 前向智能摄像头和前向毫米波雷达融合
2.2 侧向毫米波雷达(角雷达)
侧向毫米波雷达(24GHz)实现盲区监测功能,有2种实现方式。后侧方面2个毫米波雷达,实现BSD(盲区监测)、LCW(变道碰撞预警)、RCTA(后方交通穿行预警)和DOW(开门预警)功能;后侧2个毫米波雷达+前侧2个毫米波雷达,除了实现以上功能外,还能实现FCTA(前方交叉路口预警),支持L2级以上的高级驾驶辅助功能。随着科技进步,侧向毫米波雷达性能也在逐步提升,见表5。 表5 侧向毫米波雷达部分参数和发展

侧向毫米波雷达(4个)、前向毫米波雷达(1个)、前向智能摄像头(1个)组合使用,可实现L2+(或L3-)级自动驾驶。在L2级自动驾驶上,增加TJA/HWAML(高速公路驾驶辅助—多车道)、ALC(主动变道辅助)、TLC(触发式变道辅助)、ELK(紧急车道保持)、ESA(紧急转向辅助)、JA(十字路口辅助)、全方位预警(含BSD/DOW/RCTA/FCTA/LCW)(图2)。可高速公路工况下,实现自动驾驶功能。
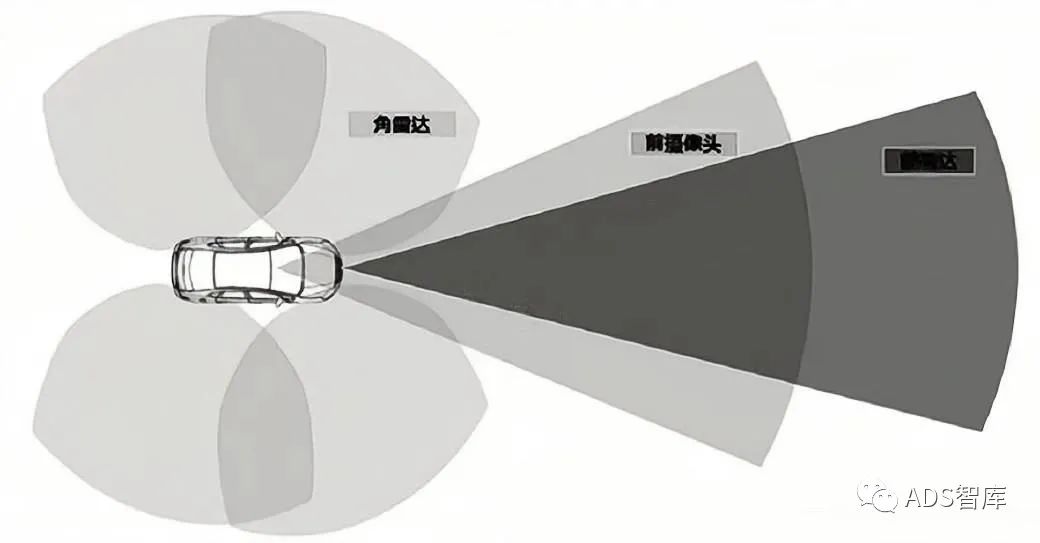
图2 前向摄像头、前向毫米波雷达、角雷达融合
2.3 超声波雷达
根据超声波雷达短距离探测目标物的特点(表6),超声波雷达根据不同数量组合,可实现PDC(倒车雷达)、APA(自动泊车辅助)和BSD(盲区监测)功能。后保险杠上安装4个超声波雷达,可实现PDC功能,有些车辆在前保险杠上同时安装4个超声波雷达(前后共8个超声波雷达),倒车时探测前方障碍物。在前后保险杠侧面安装4个超声波雷达,可实现近距离盲区监测功能,同时结合前后8个超声波雷达,共12个超声波雷达,能实现APA功能。如果车辆侧面安装有毫米波角雷达,实现BSD功能,则侧面的超声波雷达就不用安装。BSD安装超声波雷达的主要要因是其成本优势。超声波雷达不同组合及功能见图3。 表6 超声波雷达部分参数及特点
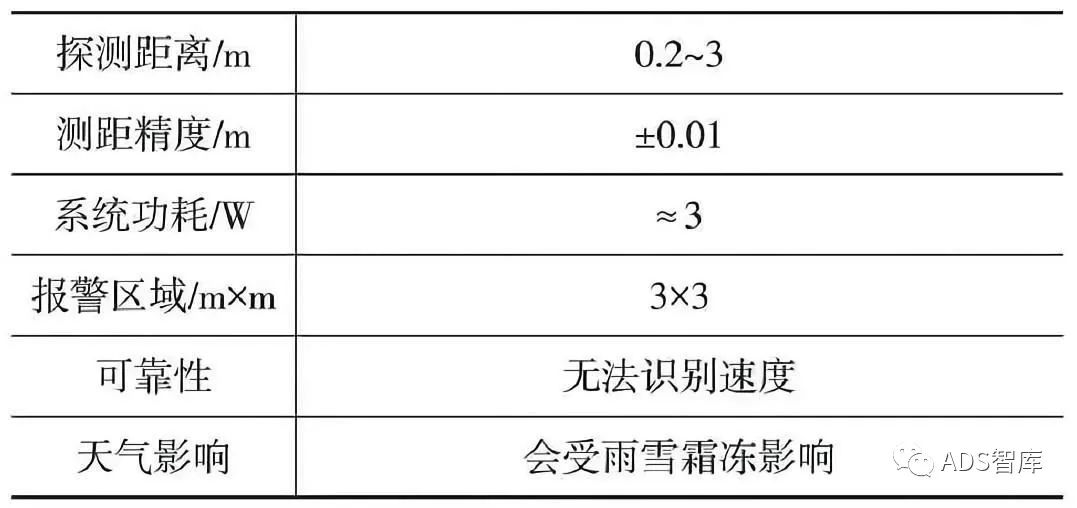
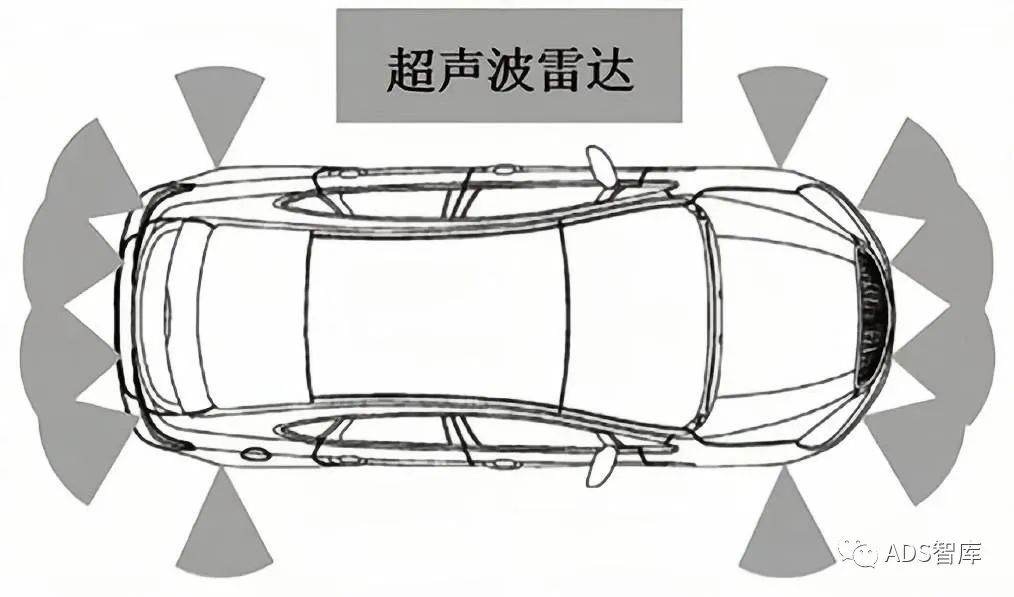
图3 超声波雷达方案布局
2.4 环视摄像头
AVM(全景式监控影像系统)通过前后左右4个图像传感器(环视摄像头)采集车辆周边环境数据,将影像通过CVBS(标清)/LVDS(高清)传递给全景影像控制器。如果仅在后方装1个摄像头,可实现倒车影像功能。如果同时在前后左右安装4个摄像头,通过对4个摄像头输入图像进行畸变校正及裁剪,实现4个视图及2D俯视图效果集成,3D旋转效果(高清方案)集成,最终通过MP5进行显示。环视摄像头部分重要参数见表7,其布置在整车示意见图4。 表7 环视摄像头部分参数
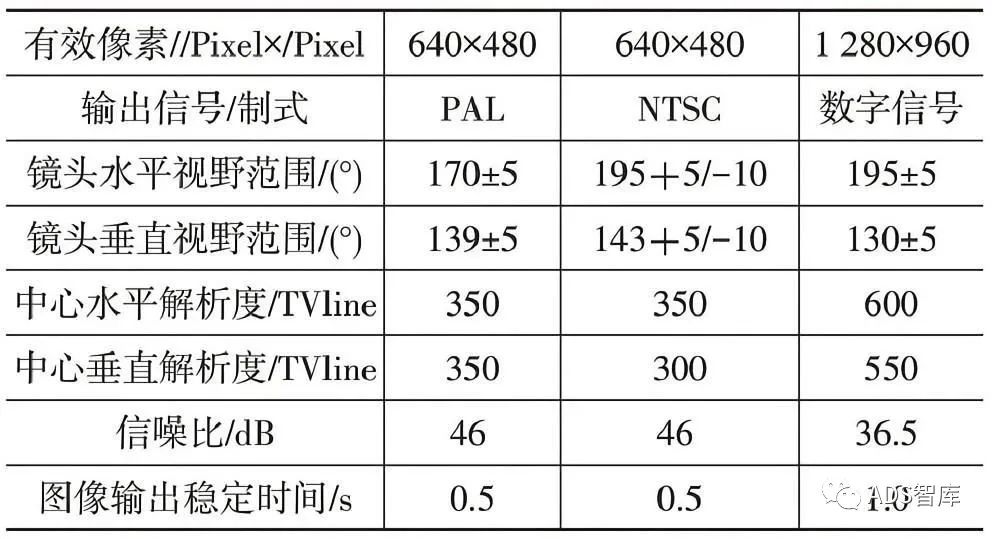
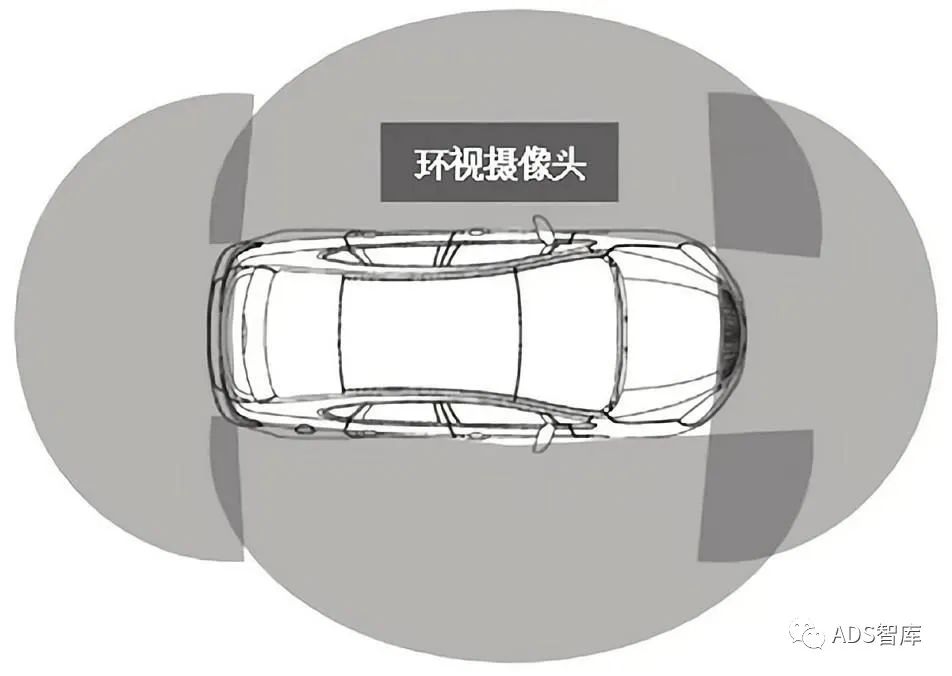
图4 环视摄像头方案布局
Part.03 传感器整车布置融合
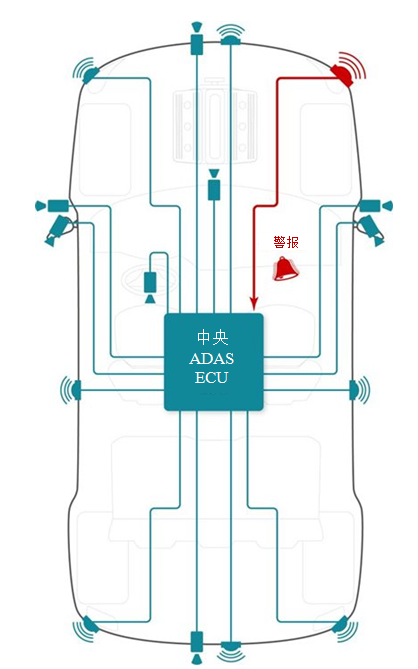
高级驾驶辅助系统的不同传感器之间的组合布置,需要考虑到覆盖范围和冗余性。不同传感器的感知范围均有各自的优点和局限性,现在发展的趋势是通过传感器信息融合技术,弥补单个传感器的缺陷,提高整个智能驾驶系统的安全性和可靠性。覆盖范围:车体360°均需覆盖,根据重要性,前方的探测距离要长(120m),后方的探测距离稍短(80m),左右侧的探测距离最短(20m)。为了保证安全性,每块区域需要2个或2个以上的传感器覆盖,以便相互校验,如图5所示为布置方案。
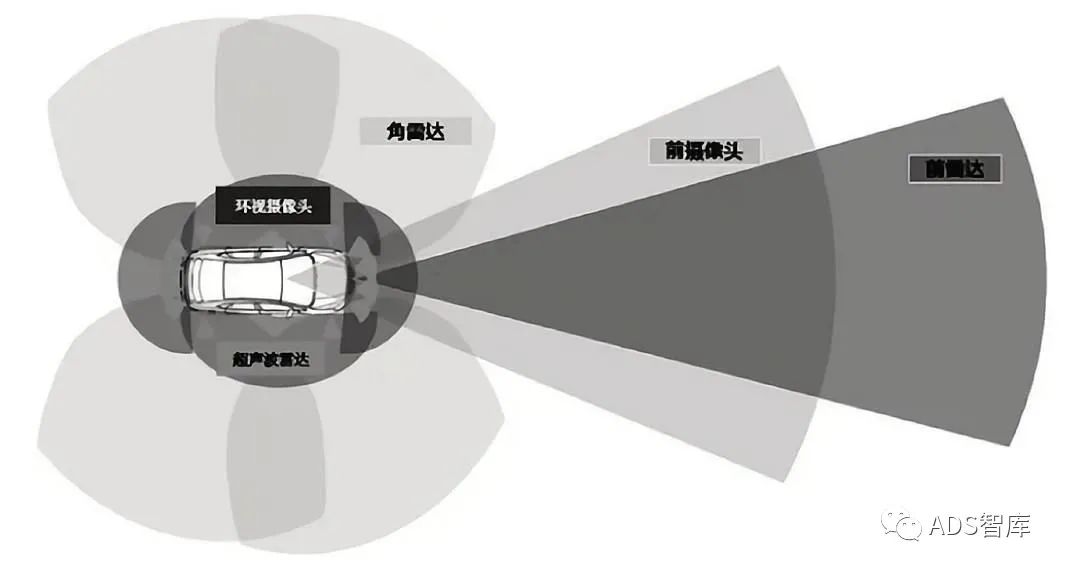
图5 传感器布置融合示意
3.1 前向智能摄像头和前向毫米波雷达布置融合
前雷达安装位置根据雷达性能参数要求、车身造型,设定合理的布置位置。雷达离地高度(雷达天线轴到地面的距离)推荐50cm,30cm到120cm之间都可接受。离地高度接近30cm可能会有过多的地面反射信号干扰直接信号接收和降低探测的风险。雷达与保护盖之间的距离大于15mm(2倍波长,可以避免复杂近场对雷达波束的影响),小于40mm(以避免过大的雷达波相交面)。雷达横向位置坐标在-30cm到30cm之间。雷达如果安装前盖板,对盖板也有特殊要求,比如曲率半径>600mm、波束与盖板相交部分厚度均一、型面需要经过仿真测试、材质需要进行材料电性能测试、非喷涂件等。毫米波雷达波束与周边结构间距>5mm,与车辆角度-俯仰角、偏航角、侧倾角为0°,雷达FOV与牌照框距离15mm以上,避免安装牌照后影响雷达探测等等要求。如图6所示。
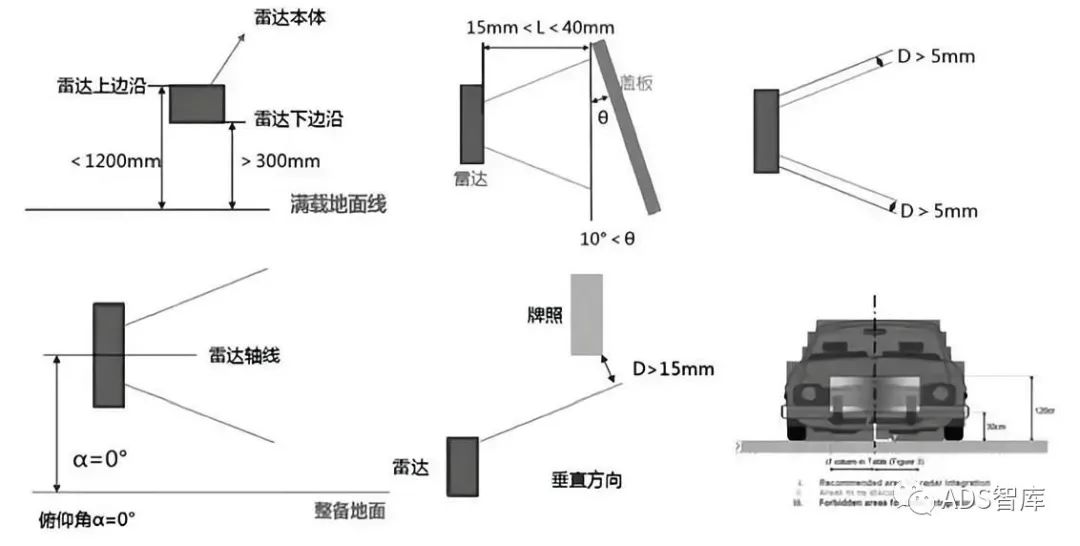
图6 前向毫米波雷达布置示意 前摄像头最好的垂直安装位置是在挡风玻璃的中心,高度在1200mm以上为佳,可以允许偏移挡风玻璃中心线在10cm以内。偏航角、侧倾角、俯仰角最好为0°附近(±3°)。支架应该安装在干净的玻璃区域,视角区域不能被绢印或者印刷遮挡。摄像头视窗与雨刮轨迹线间距大于30mm,镜头模块与挡风玻璃的之间间隙应该保证最小1mm。开口应该由投影在挡风玻璃各层的视角决定,摄像头支架和罩盖上应设计通风孔(开孔面积大于120mm²),保证空气流通。支架安装在挡风玻璃的位置公差通常是±1mm(定位)和±2.5°(旋转)(图7)。
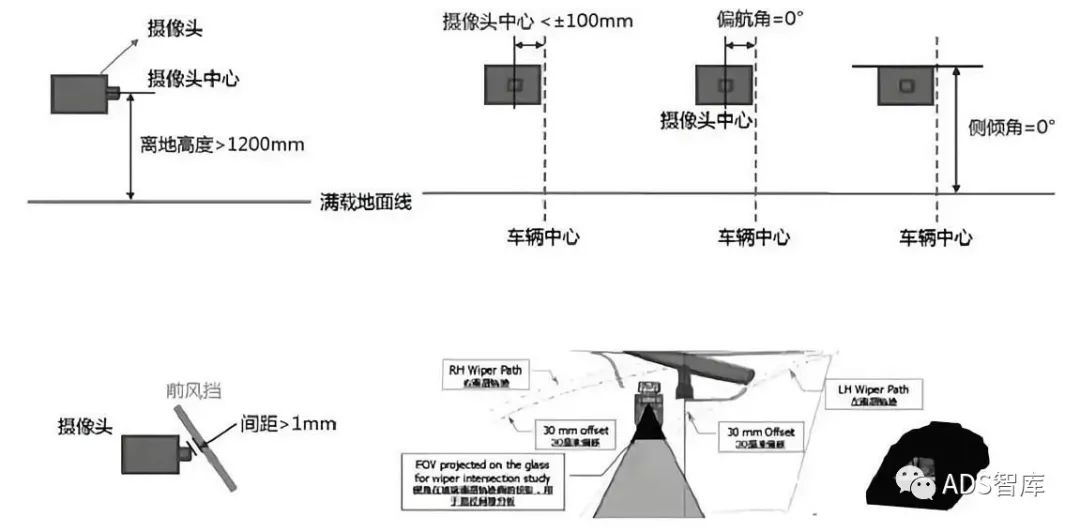
图7 前摄像头布置示意
3.2 侧向毫米波雷达(角雷达)布置融合
角雷达根据其性能参数要求、车身造型,设定合理的布置位置,车身要预留布置空间。角雷达布置高度要求:过低泥水污物影响雷达,太高离车辆近处的盲区会变大(可能会导致±20°以外无视野),推荐高度在400mm到1000mm之间。要达到盲区最小化,雷达与车辆纵轴线的夹角要在30°到45°之间为宜,雷达与车辆水平面夹角最好控制在90°。雷达FOV视野内无金属,棱线,多层结构或材质,FOV与覆盖件的最大角度为70°,覆盖件要求平整,曲率要求大于350mm。
3.3 超声波雷达布置融合
为了实现APA功能,整车上要布置12个超声波雷达,布置数量较多。超声波雷达传感器安装支架上,通过与保险杠蒙皮的粘接固定上。为了最大限度满足探测要求,超声波雷达布置位置提供了具体要求,见图8。布置具体要求有:避免将雷达布置在凹陷于汽车保保杠的表面、避免拍照干涉雷达探测区域、远离热源排气管、大功率灯具等等。
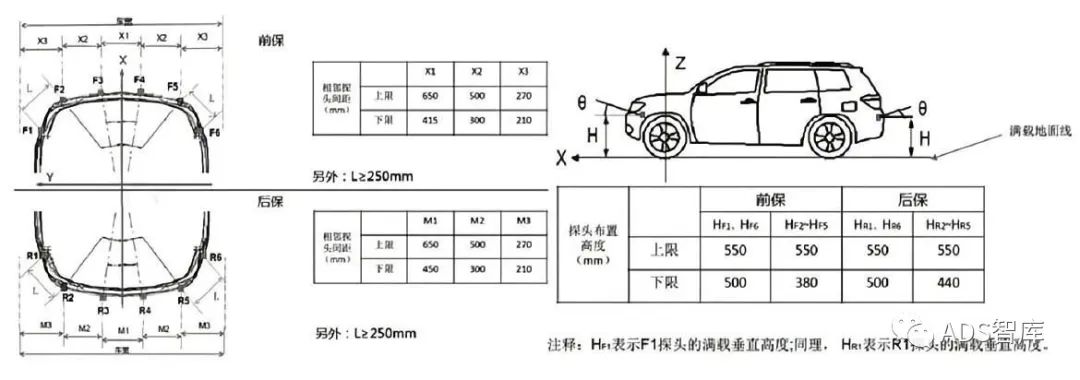
图8 超声波雷达布置位置要求
3.4 环视摄像头
AVM环视系统,共需在车身前后左右布置4个摄像头。前方摄像头安装在前格栅附近区域。后方摄像头安装在后背门牌照灯或附近区域。左右侧摄像头需要安装在后视镜壳底部,需要在左右后视镜中预留一个摄像头的孔位,以便于左右摄像头的安装。摄像头布置时应进行光学校核,保证相邻摄像头影像有足够的重合,并且在摄像头1°的组装误差范围内应能保证图像拼接无黑边,盲区不能超过企业标准所要求。为防止拍摄影像的改变,而导致全景影像无法拼接,摄像头应具有防旋转的定位结构。 前后摄像头布置要求:车辆满载时,离地高度≥600mm;偏离中心平面距离≤50mm,建议置于中心平面;视轴与车辆XZ平面平行;视轴与车辆Z轴夹角建议45°到75°,光轴与地面线交点距车身最外侧1000~2000mm;盲区视野≤200mm;摄像头垂直视野在3000mm处可完整看到直立于地面3000mm高的物体。如图9为环视摄像头(前)布置要求。
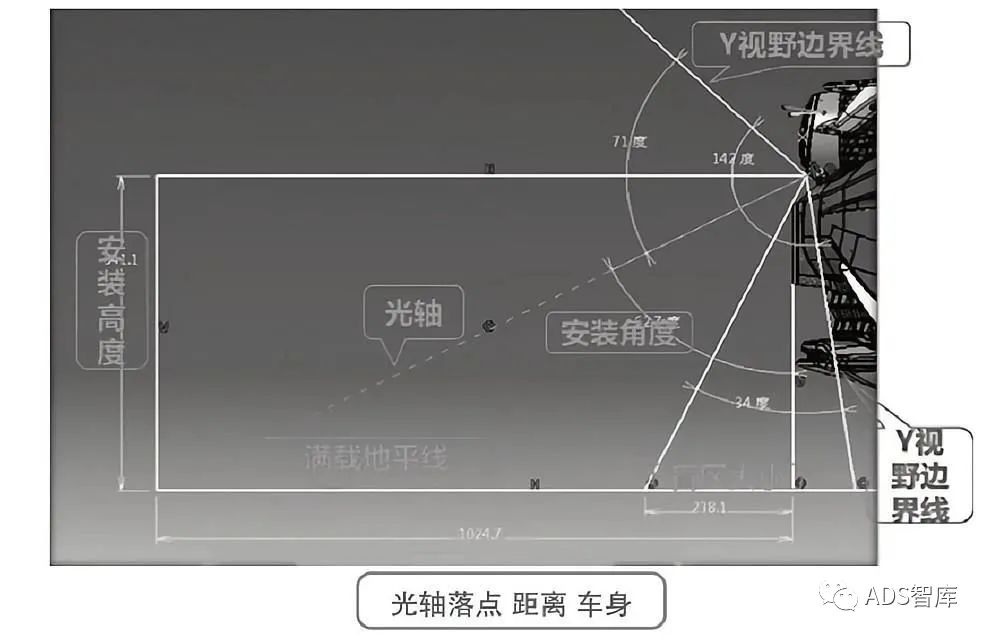
图9 环视摄像头(前)布置要求 左右摄像头(后视镜上)布置要求:摄像头前视图,视角与垂直线之间夹角建议20~25°;视角与垂直线之间夹角建议1.5~5°;安装高度大于900mm;车身突出距离大于100mm;视野需覆盖车辆前后各10m位置,且10m的视野线与后视镜壳体下边缘距离大于1mm,前后5m的视野线与光轴面夹角均小于85°,且5m的视野线与后视镜壳体下边缘最小距离大于1.2mm;摄像头外突小于5mm(可调节)。
Part.04 总 结 高级驾驶辅助系统的传感器除了要保证探测范围的覆盖冗余度,在实际安装中,还要符合每个传感器和车辆的安装条件。
编辑:黄飞














 工商网监
工商网监
评论