 电子发烧友App
电子发烧友App


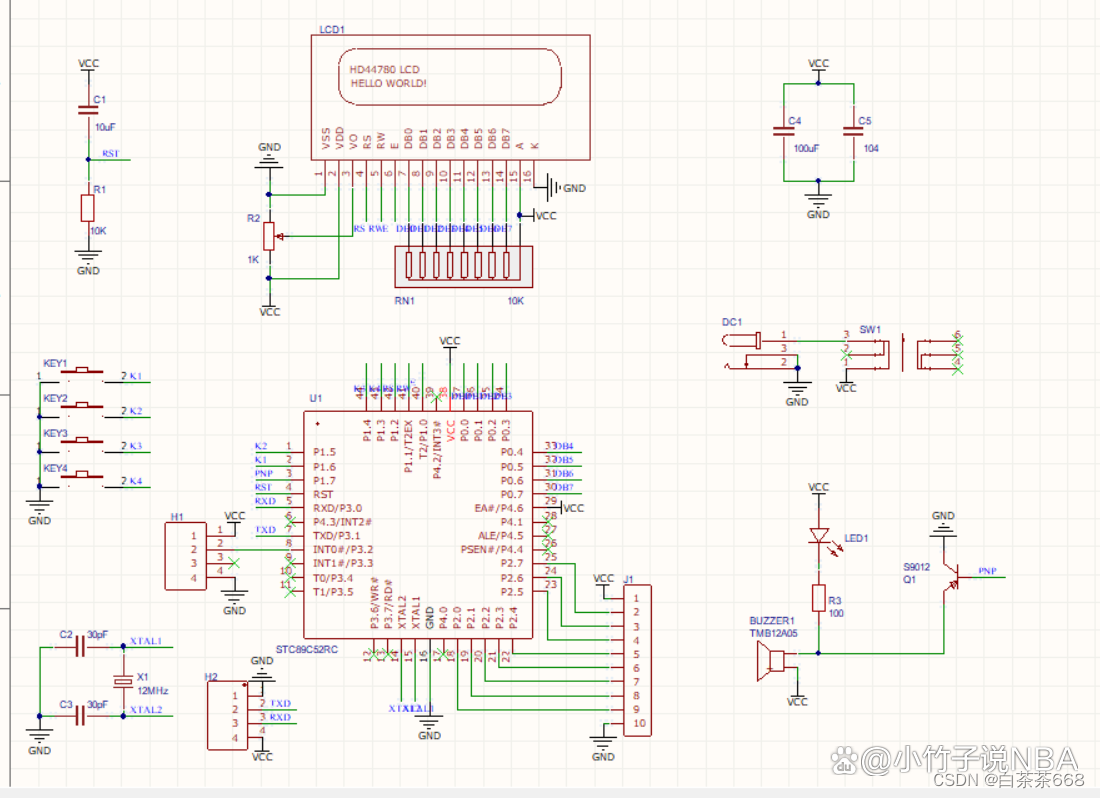
基于51单片机的倒车雷达的主板设计,采用四探头多路同步探测,确保返回值的准确性。
主要功能
本系统可具备以下几个功能:
(1)倒车时,可显示车辆与后障碍物之间的距离;
(2)可自由设定报警距离;
(3)当车辆与障碍物之间的距离小于等于设定的距离时,可发出声光报警;
(4)可根据环境温度的不同对声速的计算进行自动修正。
主要参数
(1)测量距离:20 cm ~ 450 cm;
(2)显示精度:1 cm
(3)测量精度:小于1%;
(4)电源:5 V直流
原理图:
 编辑
编辑
Pcb:
 编辑
编辑
源程序:
/*********************************************************/
// 头文件
/*********************************************************/
include
include
/*********************************************************/
// 宏定义区
/*********************************************************/
#define uchar unsigned char
#define uint unsigned int
/*********************************************************/
// 管脚定义区
/*********************************************************/
sbit Lcd_E = P1^0; // LCD_E管脚
sbit Lcd_Rw = P1^1; // LCD_RW管脚
sbit Lcd_Rs = P1^2; // LCD_RS管脚
sbit Key_Astern = P1^3; // 倒车开关的管脚
sbit Key_Set = P1^4; // “设置”键的管脚
sbit Key_Down = P1^5; // “-”键的管脚
sbit Key_Up = P1^6; // “+”键的管脚
sbit Alarm = P1^7; // 声光报警管脚
sbit Trig_1 = P2^0; // 第1个探头TRIG管脚
sbit Echo_1 = P2^1; // 第1个探头ECHO管脚
sbit Trig_2 = P2^2; // 第2个探头TRIG管脚
sbit Echo_2 = P2^3; // 第2个探头ECHO管脚
sbit Trig_3 = P2^4; // 第3个探头TRIG管脚
sbit Echo_3 = P2^5; // 第3个探头ECHO管脚
sbit Trig_4 = P2^6; // 第4个探头TRIG管脚
sbit Echo_4 = P2^7; // 第4个探头ECHO管脚
sbit DHT_Data = P3^2; // DHT11传输总线管脚
/*********************************************************/
// 特殊功能寄存器定义区
/*********************************************************/
sfr ISP_DATA = 0xe2; // 定义数据寄存器
sfr ISP_ADDRH = 0xe3; // 定义地址寄存器高八位
sfr ISP_ADDRL = 0xe4; // 定义地址寄存器低八位
sfr ISP_CMD = 0xe5; // 定义命令寄存器
sfr ISP_TRIG = 0xe6; // 定义命令触发寄存器
sfr ISP_CONTR = 0xe7; // 定义命令寄存器
/*********************************************************/
// 全局标量定义区
/*********************************************************/
uint Alarm_Distance;
bit Is_Not_Show = 1;
bit Is_Long_Bright = 0;
/*********************************************************/
// 各种延时函数定义区
/*********************************************************/
void Delay30us() // 精确延时30us
{
unsigned char i;
nop ();
i = 12;
while (--i);
}
void Delay40us() // 精确延时40us
{
unsigned char i;
nop ();
i = 17;
while (--i);
}
void Delay80us() // 精确延时80us
{
unsigned char i;
nop ();
i = 37;
while (--i);
}
void Delay1ms() // 精确延时1ms
{
unsigned char i, j;
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
void Delay5ms() // 精确延时5ms
{
unsigned char i, j;
i = 10;
j = 183;
do
{
while (--j);
} while (--i);
}
void Delay10ms() // 精确延时10ms
{
unsigned char i, j;
i = 20;
j = 113;
do
{
while (--j);
} while (--i);
}
void Delay15ms() // 精确延时15ms
{
unsigned char i, j;
i = 30;
j = 43;
do
{
while (--j);
} while (--i);
}
void Delay20ms() // 精确延时20ms
{
unsigned char i, j;
i = 39;
j = 230;
do
{
while (--j);
} while (--i);
}
void Delay70ms() // 精确延时70ms
{
unsigned char i, j;
i = 137;
j = 44;
do
{
while (--j);
} while (--i);
}
void Delay500ms() // 精确延时500ms
{
unsigned char i, j, k;
nop ();
i = 4;
j = 205;
k = 187;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay_Ms(uint time) // 自定义延时函数_不精确
{
uint i, j;
for(i=0; i
{
for(j=0; j<112; j++);
}
}
/*********************************************************/
// 禁止EEPROM读、写、擦除操作
/*********************************************************/
void ISP_Disable()
{
ISP_CONTR = 0;
ISP_ADDRH = 0;
ISP_ADDRL = 0;
}








 工商网监
工商网监
评论