 电子发烧友App
电子发烧友App



丰田第二代混合动力系统(THS-Ⅱ),机械构造之精妙,控制策略之严谨,可谓独步全球,其核心竞争力就在于动力分配行星齿轮机构——Power Split Device(PSD)。从字面上简单理解,该机构就是将发动机的动力重新进行了分配,但从严格意义上来阐述,这套机构的精髓就是将发动机的输出功率进行分流。如此天马行空,脑洞大开的设计理念早在1997年第一代普锐斯上市前,丰田就对其申请了知识产权专利,这一举措对当时乃至今日想致力于混合动力技术的各大汽车厂商来说都套上了一层无形枷锁。
各大汽车厂商为了能够绕开丰田的专利,想方设法研究属于自己的混合动力方案,但是时间证明,目前还没有更好的混合动力方案能从燃油利用率、性能品控、客户体验等各个维度上超越THS-Ⅱ。为什么看上去如此简单的PSD竟能如同艺术品般迸发出无与伦比的科技魅力并且历久弥新?下面笔者对搭载全新A25B阿特金森循环发动机和P710 E-CVT型混合动力变速器的全新Lexus ES300h车的动力传递路径进行阐述。
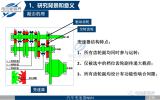
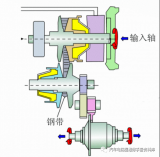
全新Lexus ES300h车的P710 E-CVT型混合动力变速器(图1)由油泵、发电机(MG1)、PSD(太阳齿轮、行星齿轮、齿轮架、齿圈、输入轴)、中间轴主动齿轮(复合齿轮)、中间轴从动齿轮、减速主动齿轮、减速从动齿轮、电动机(MG2)及MG2减速器等部分组成,其中复合齿轮与PSD中的齿圈及中间轴主动齿轮集成于一体。
PSD可将发动机输出功率分为两路,一路是将发动机输出功率输出至驱动车轮;另一路是将发动机输出功率输出驱动MG1运转,使MG1作为发电机运行,MG1产生的交流电通过绝缘双栅晶体管后传输给MG2,使MG2作为电动机运行。MG2产生的动力通过MG2减速器传输至中间轴从动齿轮,从而驱动减速主动齿轮运转,最终通过减速从动齿轮传递给差速器后将动力输出至驱动车轮。

图1 P710 E-CVT型混合动力变速器
THS-Ⅱ在P710 E-CVT型混合动力变速器的加持下,能够提供更加完善的驾驶体验,THS-Ⅱ是一套标准的PSD系统,通过PSD将发动机、MG1、MG2组合在一起,MG2与PSD的输出端相连接,这就意味着MG2与PSD的输出端永远保持同速运转,这将使MG2只起到调节转矩的作用。MG1与PSD的太阳齿轮相连接,当MG1以不同方向、不同转速旋转时,处于齿轮架端的发动机与处于齿圈端的MG2之间就会出现不同的传动比,从而实现调节速度的目的。MG1在调节速度的过程中,也会输出一部分转矩,只是MG1的主要功能还是调节速度,顺带与MG2一起调节转矩,此外,MG1还肩负着行驶中“拽起”发动机和车辆停止时起动发动机的任务。
混合动力车辆控制ECU(HV-ECU)通过换挡杆位置、加速踏板行程及车速计算驾驶人请求输出功率,再根据冷却液温度、高压动力电池充电状态、高压动力电池温度、电气负载及系统损耗计算发动机输出功率,再结合A25B阿特金森循环发动机万有特性图标定的发动机最佳工作曲线与发动机输出功率曲线计算出发动机最佳工作状态(节气门开度及发动机转速),进而确认发动机燃油喷射、点火控制、ETCS-i(电子节气门控制)、VVT-i(智能配气相位)等状态,从而实现发动机输出功率下最佳燃油利用率。
当高压动力电池不处于工作状态,并保持加速踏板恒定行程的情况下,根据能量守恒定律,发动机的输出功率应等于车辆的驱动功率,发动机的输出功率施加作用在PSD机构的齿轮架上,根据HV-ECU内存储的最佳控制策略(图2),将发动机输出功率优化分配给MG1及驱动车轮。发动机运行状态下,换挡杆位于D挡,当车辆刚要起步时,发动机输出功率分配给MG1(发电机)的发电功率所占发动机输出功率的份额最大(MG1正向负转矩运转,正向转速最高,负转矩最小)。因MG1产生的交流电通过绝缘双栅晶体管传输给MG2用作驱动,故MG1的发电量取决于MG2的用电量(即MG1发电功率=MG2用电功率),此时MG2(电动机)的驱动转矩最大,转速最低(趋近于0 r/min),发动机输出功率的剩余部分则被分配到驱动车轮,此时分配给驱动车轮的份额最小,作用在驱动车轮上的驱动力最低。

图2 HV-ECU内存储的最佳控制策略
随着车速的逐步增加,发动机输出功率分配给MG1(发电机)的份额逐渐减少,MG1旋转速度逐步下降,负转矩逐步上升,发电功率逐步减小,但输出至驱动车轮的驱动功率却逐步增加。当车辆达到一定车速时,MG1的转速逐步趋近于0 r/min,其用作发电的负转矩达到最大,被分配到的发动机输出功率最少,发电功率最低(趋近于0 kW),MG1发电功率=MG2用电功率,MG2此刻的用电功率达到最低(趋近于0 kW),但发动机的输出功率分配至驱动车轮上的份额最大,施加在驱动车轮上的驱动功率近乎等于发动机的全部输出功率。
因MG1转速趋近于0 r/min,负转矩最大,通过PSD杠杆作用原理,此刻直接施加在驱动车轮上的驱动力达到最大,因其驱动力大于行驶阻力,所以车辆此刻仍处于加速行驶状态。为了满足连续可变无级传动的控制策略,在保持发动机输出功率不变的前提下,传动比的大小需连续无级改变,这就意味着随着车速的进一步提升,驱动车轮上的驱动力会随之减小。对此丰田给出的解决方案是让MG2(发电机)正向负转矩运转,用来持续抵消作用在驱动车轮上多余的驱动力,MG2产生的交流电通过绝缘双栅晶体管转化成交流电后传输给MG1,MG1(电动机)反向负转矩运转(MG1用电功率=MG2发电功率),从而使车速得以提升。此种方法所达到的效果近乎于改变传动比。
当MG2刚作为发电机时,抵消驱动车轮上的驱动力用作发电的负转矩最小,但其转速较高,MG1(电动机)的转速虽趋近于0 r/min,但此刻的负转矩最大。随着车速的增加,MG2抵消驱动车轮上的驱动力越来越多,其转速越来越高,发电功率也越来越大,MG1的用电功率大小虽与之前保持一致,但随着MG1转速的不断增加,负转矩越来越小,直至驱动车轮上的驱动力与行驶阻力相等,车速达到最高,整个过程是一个加速度越来越小的加速并最终匀速行驶的过程。借助MG2的调节转矩功能和MG1的调速功能,实现最佳发动机转矩和转速不变的前提下通过连续可变的无级传动,最终达到驱动力与行驶阻力的完美平衡,因此,在后期的匀速行驶中,发动机内部所受的合外力不变,故发动机可以一直保持在同等输出功率下最高燃烧效率的发动机工作线上运行。
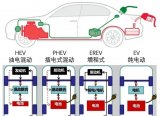
简而言之,THS-Ⅱ是通过MG1、MG2及动力电池组成的电控系统,为发动机调节输出功率。如果车辆行驶功率需求小于发动机输出功率,则通过行驶充电的方式将发动机输出的一部分功率转化为电能存储到动力电池中;当车辆行驶功率需求大于发动机输出功率,则通过油电混合方式驱动车辆;当车辆处于走走停停这种低功率需求时,为节省燃油消耗,就直接采用纯电动驱动的方式。
THS-Ⅱ根据车辆不同的行驶状态(图3,READY-on状态、起步状态、定速巡行状态、节气门全开加速状态、减速状态、倒车状态)对发动机、MG1、MG2的运转进行优化组合,使车辆能够保持高效行驶。

图3 车辆的行驶状态
在列线图(图4)中,直线用于表示PSD中太阳齿轮、行星齿轮及齿圈的旋转方向和转速之间的关系。太阳齿轮、行星齿轮、齿圈的转速大小以距离0 r/min的远近表示;“+”表示正向旋转,“-”表示负向旋转。

图4 列线图
在THS-Ⅱ中,MG1与MG2根据旋转方向和转矩之间的关系变化,可作为发电机或电动机使用,由于MG1与PSD中太阳齿轮相连接,当太阳齿轮正向旋转时,就代表MG1正向旋转,同理MG2的旋转方向也与齿圈的旋转方向相同。当MG1/MG2正向负转矩旋转时,就是作为发电机使用;当MG1/MG2反向负转矩旋转时,就是作为电动机使用。下面从各个行驶状态详细阐述全新Lexus ES300h车的P710 E-CVT型混合动力变速器动力传递路径。
1 READY-on状态
READY-on状态下(图5),MG1(发电机)起动发动机,此时MG2(电动机)施加正转矩以抵消发动机的反作用力,从而防止驱动车轮转动。

图5 READY-on状态下列线图
如果高压动力电池的电池荷电状态(SOC)不足,则发动机驱动MG1(发电机)为其充电。当车辆停止时,MG2(电动机)施加负转矩以抵消发动机直接输出到齿圈上的转矩,从而防止驱动车轮转动。
2 起步状态
如图6所示,当高压动力电池SOC充足时,车辆起步并仅使用MG2(电动机)驱动车辆行驶,当车辆低速运行时,由于发动机连接车轴具有很强的旋转阻力,齿轮架的转速为0 r/min。此时,MG1未产生任何转矩,因此太阳齿轮也没有被施加任何转矩,太阳齿轮负向旋转(自由旋转)以平衡齿圈的旋转。

图6 起步状态列线图
当高压动力电池SOC不足时,发动机驱动MG1(发电机)为高压动力电池充电,同时也为MG2(电动机)提供动力。在此状态下行驶时,发动机输出功率一路输出至驱动车轮;另一路是将发动机输出功率输出驱动MG1运转发电,MG1产生的交流电通过绝缘双栅晶体管传输给MG2,使MG2作为电动机运行。MG2产生的动力通过MG2减速器传输至中间轴从动齿轮,从而驱动减速主动齿轮运转,最终通过减速从动齿轮传递给差速器后将动力输出至驱动车轮。
3 定速巡行状态
车辆在轻负载和定速巡行状态下行驶时(图7),发动机将在最高效的燃烧范围内工作,为车辆提供动力。发动机带动MG1(发电机)发电,MG1产生的交流电通过绝缘双栅晶体管传输给MG2,使MG2作为电动机运行。MG2产生的动力通过MG2减速器传输至中间轴从动齿轮,从而驱动减速主动齿轮运转,最终通过减速从动齿轮传递给差速器后将动力输出至驱动车轮。

图7 定速巡行状态列线图
车辆在轻负载中速状态下行驶时(图8),发动机带动MG1(发电机)发电,MG1正向负转矩旋转,通过PSD的杠杆作用,将用作发电的负转矩放大至2.75倍后,直接输出至齿圈,因其足以使驱动车轮运转且远高于此时驱动车轮的驱动力,MG2(发电机)发电以削减额外产生的驱动车轮上的驱动力,此时MG1与MG2都用作发电机为高压动力电池及车身电气设备供电。

图8 轻负载中速状态下列线图
车辆在平坦路面、低负载高速状态下行驶时(图9),在保持发动机输出功率不变的情况下,HV-ECU继续执行该工况下的车辆无级变速控制策略,随着车速的提升,车速与驱动力呈现反比例线性交替变化(车速越高,驱动力越低),此时MG2(发电机)发电以削减额外产生的驱动车轮上的驱动力,削减的比例随着车速的提升逐步增长,这也间接引起了MG2的发电功率逐步增长,MG2产生的交流电通过绝缘双栅晶体管传输至MG1(电动机),MG1反向负转矩旋转,以拉升齿圈的转速,此时MG1的用电功率等于MG2的发电功率且与MG2的发电功率的增幅大小一致。

图9 平坦路面、低负载高速状态下列线图
起初MG1的驱动转矩最大,转速最低,但随着MG1反向旋转速度的提升,负转矩逐步减小,车辆一直处于加速度不断减小的加速行驶状态,直至被削减后的驱动车轮上的驱动力与行驶阻力达到平衡,车辆实现匀速行驶。此刻MG1的用电功率达到最大。整个过程中,通过连续可变的无级传动,在最终达到匀速行驶后,始终将任一发动机的输出功率锁定在最佳发动机运行工作线上,保持等功率线上最高燃烧效率的发动机的转矩和转速,以求整车的最佳动力性和最低燃油消耗率。
4 节气门全开加速状态
车辆行驶状态从定速巡行变为节气门全开加速状态时(图10),高压动力电池给MG2(电动机)提供电能,发动机继续带动MG1(发电机)发电,从而产生一个负转矩,通过PSD的杠杆作用,直接将发动机的部分输出功率输出至驱动车轮上,同时施加在MG1上的负转矩产生交流电通过绝缘双栅晶体管传输到MG2(电动机)上驱动。

图10 节气门全开加速状态列线图
当高压动力电池SOC充足且加速踏板完全踩下时(图11),HV-ECU继续执行该工况下的车辆无级变速控制策略,MG2(电动机)自始至终使用高压动力电池提供的电能以补偿车轮上的驱动力。随着车速的增加,MG1(发电机)正向负转矩的旋转转速逐步降低,MG1产生的电能通过绝缘双栅晶体管传输至MG2(电动机)的功率也逐步下降,但MG1的负转矩却随着旋转转速的逐步降低而呈增长趋势(即发动机直接输出至车轮上的输出功率逐步增长),直至MG1的转速趋近于0 r/min时,MG1产生的交流电通过绝缘双栅晶体管传输至MG2(电动机)的功率最小(趋近于0 kW),发动机分配给驱动车轮的输出功率达到最大。

图11 高压动力电池SOC充足且加速踏板完全踩下时列线图
在此情况下,若要进一步提升车速,必须削减发动机分配到驱动车轮上过多的驱动力,由于MG2此时是作为电动机持续为驱动车轮输出动力,无法作为发电机来削减驱动车轮上过多的驱动力,因此HV-ECU使高压动力电池对MG1(电动机)提供电力输出,使MG1充当电动机反向负转矩旋转,以此提升驱动车轮的转速,从而提升车速。随着车速的提升,MG2直接输出至驱动车轮上的驱动力大小几乎没有变化,发动机输出功率不变,随着MG1对驱动车轮转速的逐渐拉升,发动机输出至驱动车轮的驱动力也随之下降,当发动机输出至驱动车轮的驱动力结合MG2电动机补偿至驱动车轮的输出功率与行驶助力达到平衡后,车速达到最高,以匀速状态行驶,此时,MG1所用来自高压动力电池的用电功率达到最大,反向转速达到最高,负转矩最小。
5 减速状态
当车辆挡位置于D挡行驶,且车速逐渐降低时(图12),发动机输出功率为0 kW,此时驱动车轮驱动MG2(发电机)为高压动力电池进行充电,MG2对驱动车轮产生阻力,并产生制动作用。

图12 车辆挡位置于D挡行驶,且车速逐渐降低时列线图
6 倒车状态
倒车状态根据高压动力电池SOC是否充足可分两类讨论,当高压动力电池SOC充足时(图13),高压动力电池给MG2(电动机)提供电能进行反向负转矩旋转,此时发动机不工作,因为MG1的旋转阻力小于发动机的旋转阻力,因此MG1正向自由旋转以平衡驱动车轮的旋转。

图13 倒车状态下高压动力电池SOC充足时列线图
当高压动力电池SOC不足时(图14),发动机给MG1(发电机)提供动力输出,使MG1进行正向负转矩旋转,MG1产生的交流电通过绝缘双栅晶体管分别传输至MG2和高压动力电池,此时MG2(电动机)反向负转矩旋转使驱动车轮反向旋转。

图14 倒车状态下高压动力电池SOC不足时列线图
审核编辑:黄飞











 工商网监
工商网监
评论