 电子发烧友App
电子发烧友App



本文内容主要围绕自动驾驶汽车测试场景的内涵、作用、尺度、视角以及数据来源等方面进行了详细阐述。
01. 场景要素和场景分类 在进行测试场景构建时,首先需要明确测试场景所涵盖的要素。 真实世界中的场景无穷无尽,要素纷繁复杂,对场景进行分解,提取场景中包含的要素类型,是对现实世界场景进行降维和抽象的基本方法。 为了便于要素的分析及组织,需要对场景要素进行分类。根据不同的组织结构,场景要素划分有多种方式。从自动驾驶测试的需求角度出发,场景要素可以分为环境要素和自车任务两类要素。
从场景要素的基本属性出发,可以分为静态要素和动态要素等。从场景要素的拓扑关系出发,可以分为道路要素、交通参与者要素、气象要素等。场景要素是测试场景构建的基础,对自动驾驶汽车的测试和评价过程起重要作用,是测评体系的主要支撑。
从场景要素的不同属性出发,完整的测试场景要素包括: 一定空间范围内的静态环境要素:道路类型、交通设施、地理信息、静态障碍物等。
一定时空范围内的动态环境要素:如动态交通指示设施及通信环境信息。
 行驶环境中的交通参与者要素:机动车、非机动车、行人和动物等。而被测车辆不属于该要素类别,主要原因是其行为不一定必须是预定义的。
行驶环境中的交通参与者要素:机动车、非机动车、行人和动物等。而被测车辆不属于该要素类别,主要原因是其行为不一定必须是预定义的。
该行驶环境中的气象环境要素:光照、温度、湿度、气候等。
车辆的初始状态:Ego被测车辆的初始状态、目标和行为要素等。
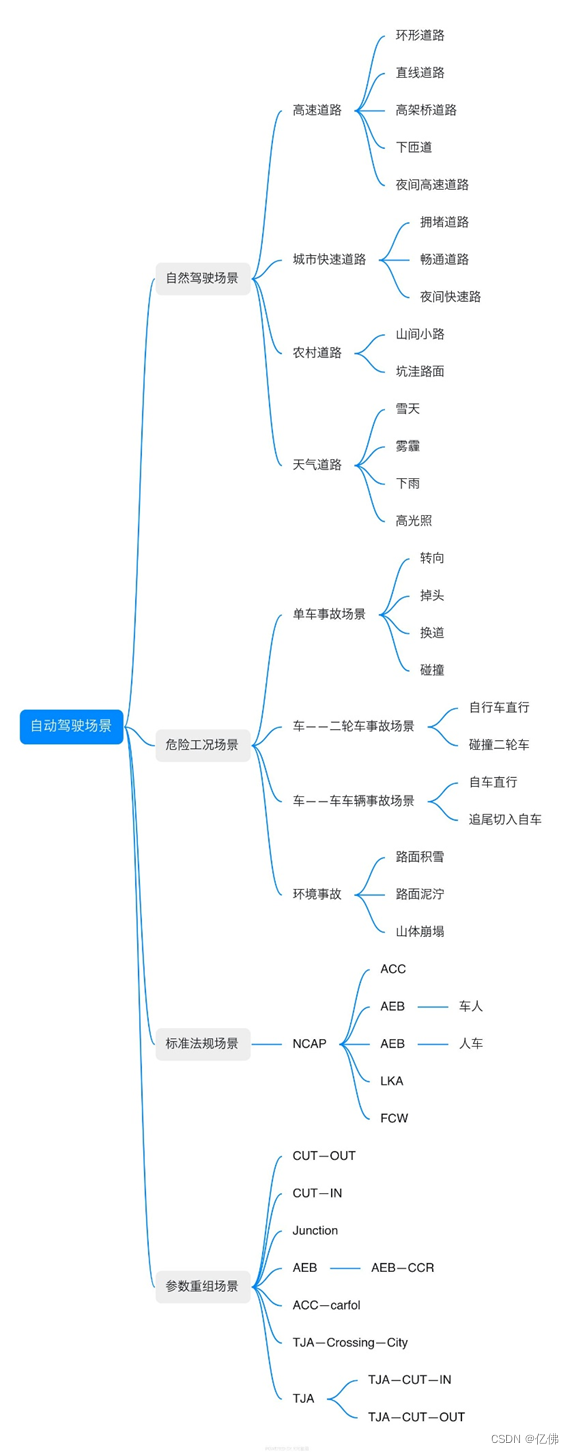
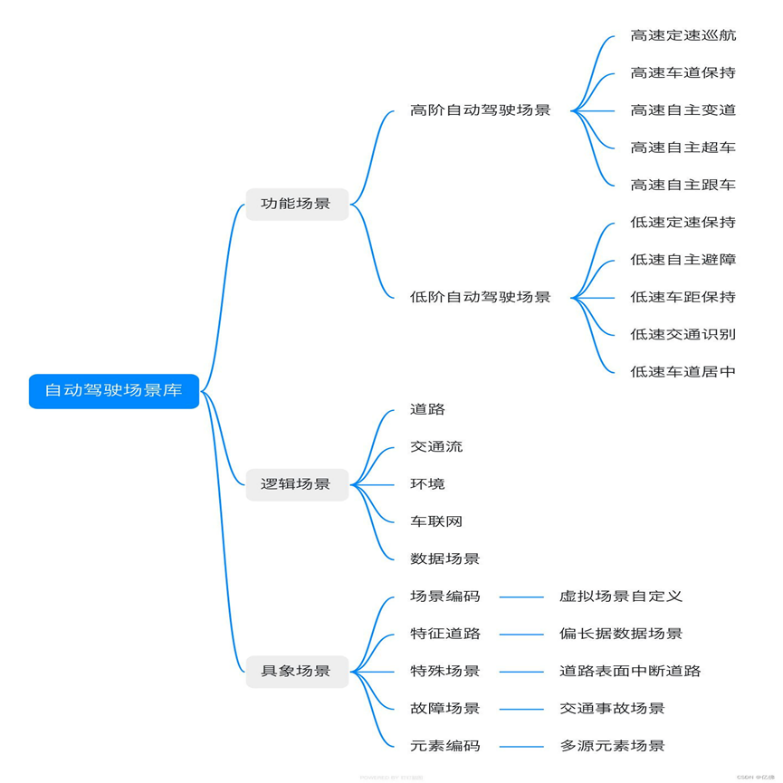
测试场景进行分类。具体分类方法包括以下几类: 1.按测试场景的数据来源进行分类,如自然驾驶数据、危险工况数据、标准法规等来源形成的测试场景,主要用以测试自动驾驶功能的有效性、安全性等。 2.按道路结构层次机械能分类,道路基础路网场景、非结构化道路场景、静态场景和动态场景等。景等不同层次的测试场景,主要用以满足功能开发不同阶段需求。 3.按测试场景表征的抽象程度进行分类,如逻辑场景、功能场景、具体场景。 4.按测试场景的应用方式进行分类,如仿真测试场景和场地测试场景等。 5.按测试场景所包含的要素属性特征角度进行分类,如结构化道路场。
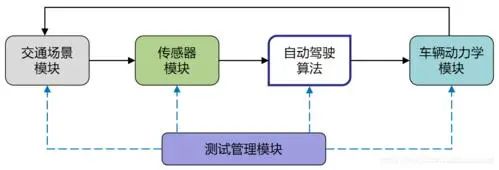
02. 测试方法 测试场景研究方法论,涉及测试场景的构成要素分类、场景构建方法、测试场景应用关键技术等内容。
2.1测试场景生成步骤 测试场景构建需经过数据采集、数据分析挖掘、场景生成等步骤,并通过虚拟仿真和物理测试技术在实际测试环境中复现场景。
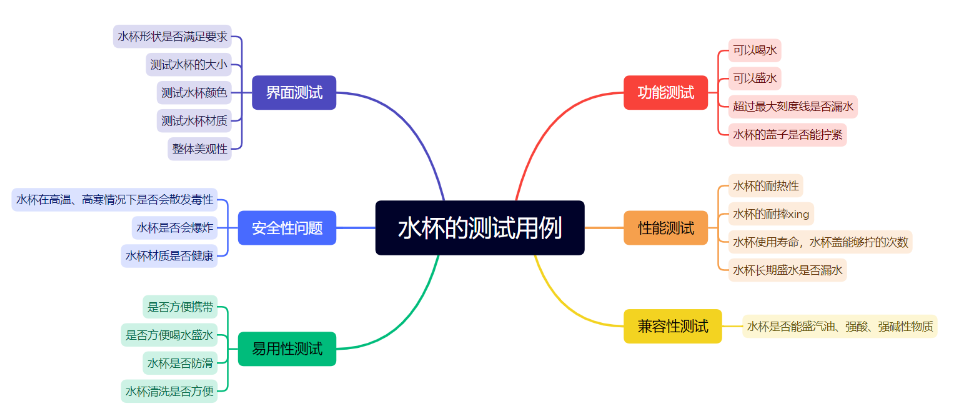
2.2测试用例设计理论方法 设计测试用例理论方法:测试用例的设计方法有多种,常用的包括正交实验法、边界值分析法、等价类划分法、判定表法和错误推测。 对比测试 枚举测试 覆盖测试 阿拉斯加测试方法等。
2.3常见测试理论方法 正交实验法:正交实验法是一种基于正交表的测试用例设计方法。它通过选择一组有限的测试用例,覆盖了多个因素的不同取值组合,从而减少了测试用例的数量,提高了测试效率。
边界值分析法:边界值分析法是一种基于系统边界的测试用例设计方法。它通过选择系统输入的边界值和特殊值作为测试用例,以检测系统在边界情况下的行为。
等价类划分法:等价类划分法是一种基于输入数据的特性进行划分的测试用例设计方法。它将输入数据划分为不同的等价类,然后选择代表性的测试用例来覆盖每个等价类。
判定表法:判定表法是一种基于系统规则的测试用例设计方法。它通过创建一个判定表,列出系统的输入条件和对应的输出结果,然后根据判定表选择测试用例。
错误推测法:错误推测法是一种基于错误假设的测试用例设计方法。它通过假设系统可能出现的错误情况,设计相应的测试用例来验证系统的容错能力。
03.
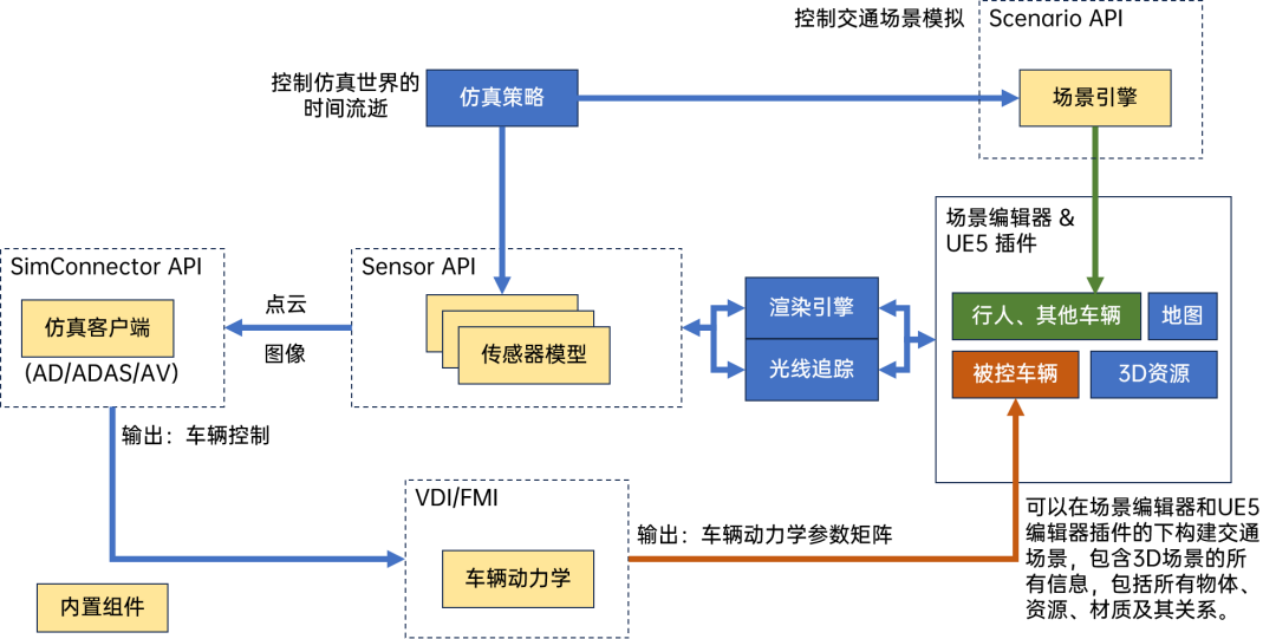
自动驾驶仿真测试的方向
在自动驾驶测试场景标准化过程中,实现不同采集平台和技术方案的兼容性以及数据库数据的互通共享,主要可以从以下几个方面着手: 1.制定统一的数据格式标准:首先,需要定义一种通用的数据交换格式或协议,如AVP(自动驾驶验证和验证)数据格式,以便各种采集设备、系统都能按照同一标准进行数据输出。这样可以确保从不同平台获取的数据能够相互理解和解析。 2.构建标准化测试场景库:建立包含各类基础场景、特殊场景等在内的标准化测试场景库,并明确描述每个场景的参数指标,便于在不同的测试平台和解决方案中复现并进行验证。 3.建设跨平台数据接口:开发通用的数据接入和转换工具,支持多种数据源的接入与转换,从而实现在不同平台间的数据交互。 4.搭建数据共享平台或数据中心:通过云服务技术,建立一个安全可靠的数据存储和共享中心,各参与方能将符合标准的数据上传至该平台,实现数据资源的汇聚和互通。 5.强化信息安全与隐私保护:在保证数据共享的同时,采取严格的加密、脱敏措施,确保敏感信息的安全,遵守相关的法律法规要求。 6.积极参与行业组织和联盟:加入国内外自动驾驶相关标准组织和产业联盟,共同推动和采纳行业通行的数据格式、接口规范及安全标准,加速实现数据层面的互操作性和一致性。
04. 测试场景
服务于特定测试目的的场景则被称为测试场景。测试场景可以帮助人们把特定的研究对象放置在具体的情况下进行研究,考查其表现和反应等,从而形成一定测试结论。对于自动驾驶汽车测试场景,其含义可以从以下几方面进行理解。
4.1测试场景的内涵
场景被应用于自动驾驶汽车测试时,描述的是某类或某个行驶环境,以及被测车辆在上述行驶环境中的任务。
行驶环境描述了基本的交通环境情况和交通参与者的状态及其行为,能够呈现或反映真实世界中的交通情景的发生环境以及发生过程。
被测车辆的目标及行为描述了被测车辆在上述行驶环境下,需要完成的任务或预期完成的任务。 上述两部分共同组成了某个或某类特定测试场景。在测试场景中,可以对被测车辆的特定功能在行驶环境下的表现进行考查和分析。
4.2测试场景的作用
测试场景用于对自动驾驶汽车的功能或性能进行测试、验证或评价。应用测试场景必须有明确的测试目的,如对车辆预期的行为、性能要求等的测试。 通过被测车辆在测试场景中的表现,可以对车辆进行验证和评价。
4.3测试场景的尺度 测试场景描述的是一定时间和空间范围内的交通行驶环境以及被测车辆的测试任务。
测试场景中包含动态要素,其行为反映的是一个动态过程,有一定的时间跨度;测试场景包含的所有要素是被布置在一定空间尺度的环境下的。
测试场景的时间和空间尺度的大小是依据测试任务而确定的。 对于时间尺度而言,如紧急避障场景,一般持续数秒,而对于跟车行驶场景,则可能持续数分钟甚至数小时。对于空间尺度而言,测试场景可能包含一段道路,或者数条道路组成的路网。
4.4测试场景的视角
测试场景存在多种视角。 首先是研发人员或场景设计者的视角。 在该视角下,能够获得最为完整的场景信息,且是真实信息。该视角主要用于测试人员构建测试场景以及测试结果的评价。
其次是被测车辆的视角。 在该视角下,场景信息是不完整的。自动驾驶汽车主要通过车载传感器、无线通信设备等获取周围行驶环境和交通参与者的信息,因此这些信息的范围有限,且存在一定误差。该视角是车辆在实际行驶过程的视角,是分析行驶环境和驾驶任务的重要视角。
最后是其他交通参与者的视角。 与被测车辆视角类似,该视角下的场景信息也是不完备的,从该视角出发可以对被测车辆的交通协调性等行为进行评价。
05. 测试场景的数据来源
自动驾驶汽车测试场景,需要强调的是其来源应该是一般的交通场景,自动驾驶测试场景技术发展与应用。涵盖城市、高速公路、乡村、越野等各种交通环境。 为形成测试场景,可以通过分析和筛选已有的各类交通场景数据获得测试场景。或者可以根据测试需求,对相关理论知识和经验,构建能够反映真实交通环境的测试场景。 06. 测试评估 自动驾驶汽车的功能开发与验证,形成较为完整的系统,功能也趋于完善后,则需要对其进行进一步的测试与评价。形成完整的闭环。
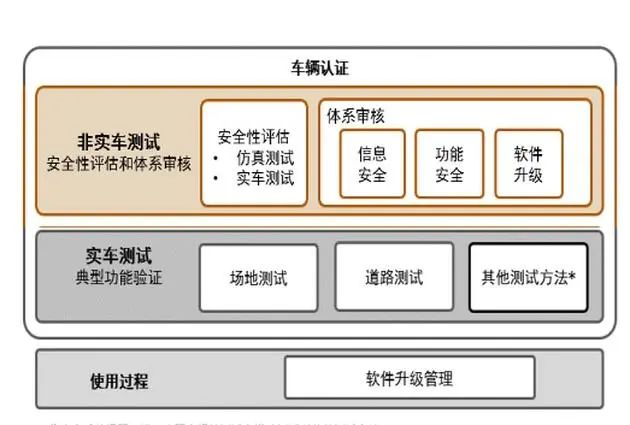
测试与评价的目的是通过车辆的表现,对其各项性能进行评估。基于测试场景的方法是进行测试与评价的有效手段。 6.1特性场景测试 通过选取或构建能够体现车辆特定性能的场景,制定合理的测试任务,可以对自动驾驶汽车的不同维度和不同方面的性能,如行驶自治性、安全性、经济性、舒适性、交通协调性等进行评价。 6.2检测与认证 基于测试场景的检测与认证是非常必要的。通过选取或构建典型测试场景,考查自动驾驶汽车在各种交通情况下的行为,对各项功能的安全性和可靠性等进行检测与认证,可证明其是否具备在真实交通环境下应对多种场景的能力以及规避风险的能力。
6.3测试场景需要满足的要求
为满足以上不同测试阶段、不同测试目标的测试需求,测试场景需要满足以下要求: 可界定、可调整、可分解、通用性多用途、可复制、可组合、可编码。
可量化:场景中包含的各类要素所体现出的特征应是可被量化的如道路的几何尺寸、线形特征,静态要素的大小、位置,动态要素的初始状态行为,环境的温度、光照、湿度等。通过量化,可以形成测试场景具体和准确表达,进而使测试场景能够重复使用且具备一致的效果。
可执行:测试场景应是可执行的,即在一定的技术基础和资源条件测试场景是可实施的。测试场景中不应包含一些难以复现、不可人为控制的要种类,或者现有技术手段难以达到的要素指标水平,或者因测试方案存在极全风险而造成测试场景无法实施的内容。
测试场景应具备的特征 基于上述对测试场景的要求,所形成的测试场景一般具备以下特征。三阶段测试与认证;满足不同测试环境的应用需要。
可界定:对于测试场景的构建,可以通过自然或机器语言及图形的方式。
多用途:测试场景应适合各种不同用途。包括满足自动驾驶汽车上路前进行描述和界定。不同测试场景可对自动驾驶汽车进行多项性能的测试,因此需以可界定的方式对不同测试场景对应不同测试功能或阶段进行描述和界定,使测试人员能够准确构建相应测试场景。
可调整:测试场景在被应用的过程中需具备可调整性。主要表现在可对构成测试场景的要素进行调整,如对要素的数量、种类、空间位置、触发机制、触发时间等进行调整。
可复制:测试场景应是可被重复设置并使用的,即被测自动驾驶车辆应处于可被重复使用、设置并保持相同测试条件的测试场景中。一方面,同一自动驾驶汽车被测时,需要进行多次重复测试;另一方面,对不同自动驾驶汽车的相同功能或性能指标进行对比测试时,也需要测试场景具备高度可复制性。
可分解:测试场景可分解产生基元场景。测试场景反映了一定时间和空间范围内要素和自动驾驶车辆行为的综合状态,可从不同角度对测试场景进行分解。如从时间角度,可将测试场景分解为若干瞬时片段的基元场景;从空间角度,可将测试场景分解为空间尺度不同的基元场景。
可组合:不同测试场景包含的要素可进行拆解和重组,产生更多场景,扩大测试范围,丰富测试选择。此外,场景和场景间具备可组合性,可形成具备综合功能的测试场景,增加测试的连贯性。
通用性:测试场景的应用应具备通用性。为支持测试场景的应用,应采用统一格式进行储存和管理。不同采集平台和技术方案须相互兼容,实现不同数据库数据互通与数据共享,从而有效节约开发和测试成本,形成更为科学合理的运营模式,促进测试场景的规模化应用。
| 可界定 | 可调整 | 可分解 | 通用性 |
| 多用途 | 可复制 | 可组合 | 可编码 |
| 需求标准+测试因素+高精度地图+场景编辑=测试场景 |
07. 测试场景数据来源
7.1测试场景需要来源 测试场景需求来源于自动驾驶汽车的开发与验证、测试与评价、检测与认证三个阶段。
7.2测试场景的阶段性特点 每阶段对测试场景的要求有所不同,测试场景的可量化性、可执行性、拟真性和通用性等特点。
7.3测试场景数据基于实际交通 构建自动驾驶汽车测试场景时,数据来源应基于实际交通场景,并涵盖不同交通环境,通过分析筛选已有数据或理论知识构建出真实反映交通环境的测试场景。
审核编辑:黄飞












 工商网监
工商网监
评论