软件平台,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。 腾讯推出腾讯车联“AIinCar”系统,针对交互智能和服务场景智能为车企提供了具体的解决方案,开放了五大基于AI的能力
2018-01-23 16:17:31
AutoX创始人肖健雄来信:无人车量产的4大技术储备
2020-04-24 12:38:06
。这种实时监测和快速响应的能力,大大提高了空域管理的效率和安全性。
全面覆盖与高精度数据:无人机全景监测能够实现对空域的全面覆盖,不留死角。同时,高清摄像头和传感器能够获取高精度的影像数据,为管理者
2024-02-20 15:23:56
驾驶汽车也称作智能汽车,即环境感知、路径规划、行为决策、自主控制能力的智能车辆平台。其关键技术主要有两个方面:车辆定位和车辆控制技术。无人驾驶技术实现手段是在车上安装摄像头、雷达传感器和激光探测器等先进
2014-11-11 11:21:30
摄像头车载摄像头的大致原理是:首先,采集图像进行处理,将图片转换为二维数据;然后,进行模式识别,通过图像匹配进行识别,如识别车辆行驶环境中的车辆、行人、车道线、交通标志等;接下来,依据物体的运动模式或使用双目定位,以估算目标物体与本车的相对距离和相对速度。`
2017-09-30 16:50:53
路。该程序也允许控制人用鼠标和键盘去遥控车。这还远没有完成,现在只是让小车与电脑通过蓝牙进行了连接,后面还有很多算法需要去做。包括光线对识别的影响及其它都需要考虑进去。为了大家能更清楚地理解我这个项目
2014-11-04 17:04:38
完全透支目前的路网能力。同时,不合理的出行规划也是造成拥堵的重要问题。因此车托帮通过移动互联网的技术方法和模式,致力于改善交通,为每个车主用户提供最适宜的路线,从而起到缓解交通拥堵的目的。 那么车托
2014-04-25 07:40:51
车用磁阻传感器式电子罗盘系统的开发罗盘是一种重要的导航工具,已广泛应用于飞机和航海导航等领域。一般在飞机和航海导航系统中使用的惯性导航系统由于价格昂贵、结构复杂、导航误差随时间累计等原因而不适合车载
2009-11-26 16:58:53
车联网与智能驾驶车联网和自动驾驶密切相关,很大程度上可以理解为是对自动驾驶高阶版本的增强和补充,通过车与车、车与人、车与交通基础设施、车与网络的互联互通,让对环境已经具备感知能力的自动驾驶汽车,再
2019-03-19 06:20:10
GJ—341 经纬仪载车行驶平顺性的测试与分析经纬仪是精密的测量跟踪仪器。现代军事技术的发展,要求经纬仪不仅具有可靠的精度、快速跟踪的能力,还要求经纬仪具有良好的机动性与安全性。所以对经纬仪载车
2009-12-02 12:35:58
保障。
3、测试能力库
包含系统测试组件、UITestKit组件、专项测试组件,以及分布式测试组件,实现丰富的场景模拟能力和跨设备分布式测试能力。
Hypium测试框架架构
Hypium测试框架以插件
2023-03-03 19:00:43
硬件设计则是为了确保设备在执行这些任务时能够保持低能耗,从而提高其续航能力。
2、应用场景
NanoEdge AI 可以广泛应用于各种物联网设备和传感器,如智能家居、工业自动化、智能交通、医疗健康
2024-03-12 08:09:00
Uber无人车撞死人原因:软件发现了受害者但选择忽略
2019-05-28 09:26:40
,天空灰朦,驾驶员视野不清;三是大风天气,进入台风场景,行驶阻力增大,受大风的影响,骑车人偏离本方线路左右摇晃行驶,与机动车发生碰撞; 四是高温天气,烈日炎炎,驾驶员容易疲劳瞌睡,还发生了爆胎事故
2018-10-16 13:36:05
的低空无人机反制系统。
知语云智能科技的无人机反制系统,集成了先进的雷达探测、无线电干扰、导航诱骗等多项技术。能够在复杂的低空环境中,迅速发现、识别、定位并有效管控无人机。同时,该系统还配备了智能决策
2024-01-26 16:10:05
干扰,车辆必须具有优良的电磁兼容性能,同时也必须提供一个具有能够模拟并复现车辆电磁兼容性环境的测试实验室,来验证车辆的电磁兼容性能。二、机动车电磁兼容性测试技术随着电子技术和信息技术的发展,电磁兼容试验从最初
2015-12-17 16:36:15
项目名称:无人车试用计划:项目名称:无人车主要完成功能如下:1.自主避障;2.快速行驶,时速>36km;3.大负载行驶,有效载荷≥50kg;4.具备自主的路径规划,自行行驶至目的地;5.无线视频传输,传输距离≥2km;6.可多车组网运行。现已完成方案设计,机械加工,电气设计
2020-05-28 17:29:40
巨大的发展潜力,因此把RFID技术应用来针对局部区域的交通智能化而形成“车联网”具有很高的可行性。目前,对交通拥挤事件自动检测算法的研究相对较少,仍然处于初始阶段,并且利用RFID采集交通参数来判定
2019-07-26 06:31:32
电动汽车充电。然而,仅此一举还远远不足以提高电动汽车的行驶距离。三星公司另辟蹊径,开发出最新款电动车电池的原型,号称具有卓越的供电能力,可满足汽车行驶相当长的一段距离。三星电子集团电池制造业
2016-01-15 16:34:30
为什么仅有GPS无法满足无人车的定位要求?
2021-11-22 06:55:43
目标的轨迹、进行行为分析。AI+交通:人类对车辆的控制最终会接近零,实现无人驾驶场景驾驶的进化过程正是自动智能化交通的演变踪迹:现阶段,辅助驾驶的各项功能相对比较成熟,无论是测试还是实际开放环境表现都比
2018-12-21 14:23:32
是无人驾驶的基础,无人驾驶车通过各类传感器获取外部信息,并通过车辆内部的物联卡(www.zjytech.com)传输给处理系统,系统对汽车做出正确指示,确保安全行驶。 2.新能源汽车。新能源汽车
2018-02-11 10:13:06
俄罗斯武装力量将列装无人地面车辆,早在2000年,俄罗斯国防部决定启动“2015武装自动化”计划,开展综合研究,设计无人车和无人机。尽管实施了“2015武器自动化”计划、进行了系列无人车和无人机试验,国防部还是决定终中止相关工作,放慢无人车的开发进度。
2020-05-14 08:18:06
通过交叉验证来剪枝。关于过拟合为了得到一致假设而使假设变得过度复杂称为过拟合。比如,考试的时候,有的人采用题海战术,把每个题目都背下来。但是题目稍微变化一下,他就不会做了,因为他没有总结出通用的规则。过拟合的原因一般有两种:A.模型太过复杂而样本量不足B.训练集和测试机特征分布不一致 `
2018-05-23 09:38:48
的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、后台等)智能信息的交换共享,具备复杂的环境感知、智能决策、协同控制和执行等功能,可实现安全、舒适、节能、高效行驶,并
2020-06-10 07:00:00
Communication)什么是ETC车路协同?ETC车路协同系统包括三部分组成:云端、路端、车端(用户)ETC车路协同架构图,如图:云端:对路端交通信息进行汇聚和决策,并将决策结果发送给相关路端设备。路端:包括
2023-02-21 15:03:35
该方案基于Atmega128单片机和无线通信技术设计,其创新点是采用了PC控制模式和单兵运行模式两种方式对无人车进行控制,极大地增强了无人车的功能性和环境适应能力。该方案可广泛应用于短途货运客运
2019-06-14 05:00:09
作为一个差分定位基站,对过往车辆高精定位,引导车辆进行合理的行驶。总结起来,一款RSU产品需要满足以下需求:具备强大的数据处理能力;具备高速数据上行和下发能力;适应复杂的户外场景要求;具备多种的通讯模组
2023-03-14 11:12:33
系统模块实现的功能如下:(1)LED显示模块能够对十字路口的复杂交通运行进行指示;(2)数码管显示模块实现倒计时的显示;(3)LCD显示模块使用LCD1602,实现可视化控制;(4)通过按键模块进行
2013-05-06 21:21:27
基于实物期权的供应链能力柔性决策研究应用实物期权方法研究完全竞争市场环境下的供应链管理中的能力决策问题。通过对能力投资决策的价值分析,给出柔性条件下的能力决策规则,并研究了市场演进的性质、投资成本
2009-06-14 00:22:31
大家好,我最近在研究无人驾驶车辆的运动决策方法,请各位大神指教,qq1113185817
2018-04-26 15:12:29
在物联网大环境中,天工测控在智能穿戴、车联网、无人机领域的无线模块研发步伐明显加快,推出多款高性能产品,强势布局智能穿戴、车联网和无人机等无线模块应用。
2020-12-16 06:35:30
驾驶员的违章驾驶,降低车辆的交通事故。早在20世纪70年代,欧共体就开始全面强制使用机电模拟式汽车行驶记录仪并使得交通事故率降低了30%-50%。90年代以来,美国、日本、马来西亚、新加坡等国家也纷纷制定
2019-07-30 08:16:21
如何构建一辆无人驾驶车呢?
2021-09-30 07:37:34
与自动驾驶汽车互动。对道路测试来说,开发者首先需要掌握大量车辆碰撞数据,有较大把握了解潜在的碰撞风险,并对这些潜在碰撞进行多重模拟后,在确保安全的前提下才能开始进行路测。专家表示,我国人口稠密、交通
2019-05-13 00:26:37
,解决具有复杂交联环境装备嵌入式软件测试环境搭建和测试开发的难题;还可以提高测试人员在承担软件测试任务的标准化、规范化与自动化水平。一、研制理由1、通用嵌入式系统测试平台研制理由我单位承担了大量的装备型号研制与生产任务,这些装备型号研制与生产任务中涉及大量的嵌入式设备,用于一些关键任务的控制和管理,系统的
2021-12-21 07:55:03
本文介绍了一种智能车控制系统的设计与实现方法。通过大量实验测试证明,该智能车能快速平稳地在制作的赛道上跟踪黑色引导线并行驶,而且寻迹效果良好,控制响应速度快,动态性能良好,稳态误差小,系统的稳定性和抗干扰能力强。
2021-05-18 06:46:48
智能车竞赛背景全国大学生智能车竞赛是一项举办了十四届的大学生自动控制类科技竞赛,它要求指定的车模能够在规定的赛道上实现路径识别、自主寻迹,并快速行驶。麻雀虽小,五脏俱全,虽然竞赛智能车没有现实生活中
2021-07-29 06:00:40
无人驾驶技术现如今其实非常成熟了,就以现在的技术水平看,如果把大城市复杂的交通状况变成实验室特定的格局,场景内有制式统一的车辆以及符合规矩的行人正常通行,那么不用方向盘,全程自动行驶的汽车当下就可以
2017-10-23 17:51:41
汽车从京津高速台湖收费站启程,完成了中国首台无人驾驶汽车的测试工作。 清华大学交通研究所原所长、国家汽车计算平台工程项目专家组成员史其信说,中国机动车发展过快,路网有限,无法避免导致交通拥堵,这就
2013-01-07 17:09:36
辆”,就是在普通车辆的基础上增加了先进的传感器(雷达、摄像)、控制器、执行器等装置,通过车载传感系统和信息终端实现与人、车、路等的智能信息交换,使车辆具备智能的环境感知能力,能够自动分析车辆行驶的安全及危险
2016-02-01 12:23:08
能做的事情,能够看得明白,听得到,能够理解,并且能够处理大数据。一台无人车一天要处理10几个T的数据,这是很庞大的。 最后,他表示,百度已经跟安徽芜湖合作开拓无人车的试验区,“我也很希望能够看到未来第一个
2016-05-30 17:41:49
板阶 (BLR) 车电可靠性验证iST宜特可提供汽车电子及零部件一站式整合验证服务。车用电子测试不仅着重于产品寿命测试,更重要的是,将产品结构及产品组装质量观念,带入试验中,例如推拉力测试、锡球接合
2018-09-06 16:56:38
,驾驶员视野不清;三是大风天气,进入台风场景,行驶阻力增大,受大风的影响,骑车人偏离本方线路左右摇晃行驶,与机动车发生碰撞; 四是高温天气,烈日炎炎,驾驶员容易疲劳瞌睡,还发生了爆胎事故,沥青路面也打滑
2018-09-14 09:36:48
,适用于多种场景感知的毫米波雷达产品不断涌现,如交通场景雷达、汽车雷达、智能检测雷达等。此类毫米波雷达为道路管理、车端决策提供实时场景信息,在车路系统中发挥着不可替代的作用。目前毫米波雷达技术正向高分
2020-07-01 14:16:38
测试,而且采用安全性最高的磷酸铁锂电池,电池寿命长,支持电动车的高续航能力,充电方便且安全,无疑能促进未来香港可以广泛地使用绿色交通工具,并为香港带来巨大的经济及环境效益。
2013-03-27 19:48:19
。 据了解,百度无人驾驶车项目起于2013年,由百度研究院主导研发,其技术核心是“百度汽车大脑”,包括高精度地图、定位、感知、智能决策与控制四大模块。百度无人驾驶车依托国际领先的交通场景物体识别技术和环境
2015-12-12 16:53:14
时会考虑损失大过收益”这一规律,确立无人车与人类驾驶车辆之间的关系,并建立了一个理论框架,以提高人类的驾驶体验为前提,让汽车预测它可以采取的行动。研究人员通过模拟人类驾驶车辆与无人车相遇时的场景来教会无人车
2018-08-15 11:03:50
不会取代现有的速递模式,他们测试无人机速递是为了减轻运营成本。UPS工程主管Mark Wallace表示,在农村地区,“我们的货运车常常需要行驶几英里才能完成单次快递运输。”该公司估计,通过削减一英里
2018-07-14 15:43:38
据的决策;平台问题:没有覆盖多个景区的统一信息平台,无法对进行导流,提升单个游客的价值;萝卜车为旅游景区提供低碳智能代步工具,定制车身外形,打造独特的景区旅游体验。通过萝卜车APP实现智能共享,可主动为
2018-07-01 20:19:08
系统装备软件的研发与生产质量,解决具有复杂交联环境装备嵌入式软件测试环境搭建和测试开发的难题;还可以提高测试人员在承担软件测试任务的标准化、规范化与自动化水平。一、研制理由1、通用嵌入式系统测试平台研制理由我单位承担了大量的装备型号研制与生产任务,这些装备型号研制与生产任务中涉及大量的嵌入式设备,
2021-12-24 06:22:48
根据工业和信息化部、公安部、交通运输部等三部委共同发布的《智能网联汽车道路测试管理规范(试行)》,自动驾驶汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车
2020-08-14 07:08:52
在微观交通仿真系统中,三维虚拟交通场景主要研究静态物体的构建,对交通环境中各种动态因素研究较少。该文探讨虚拟交通场景中虚拟汽车的视觉感知行为和决策行为,给出视
2009-04-06 08:47:50 10
10 ️1、车体配置多个3D激光雷达实现360°的3D环境感知,拥有极致的安全防护能力。️2、可精准识别栈板与导航避障,适用于各种室内外场景。️3、无需在环境中部署辅助设施,投入使用周期短,支持7*24h
2023-02-25 13:12:34
对自然场景下的交通标志进行准确的识别分类,是智能汽车的重要组成部分。交通标志本身数量众多,其形态复杂,而自然场景下存在着光照变化、褪色污损、扭曲变形等情况对交通标
2010-02-21 10:57:4015 整车测试仪(道路简易型) 一、设备概述:用于电动自行车车速限值及脚踏骑行能力检测。进行电动自行车骑行的安全性能、电动车电性能检测。检验数据能够储存、传输。测量参数为
2023-06-21 14:13:35
不久前由国防科技大学自主研制的红旗HQ3无人车首次完成了从长沙到武汉286公里的高速全程无人驾驶实验,创造了我国自主研制的无人车在复杂交通状况下自主驾驶的新纪录
2011-07-27 09:39:12 860
860 我国自主研发的无人驾驶汽车明年将进行从北京至天津的行驶测试,2015年将测试从北京行驶至深圳。
2012-10-19 09:10:17639 韩国国土交通部 26 日指出,自 2016 年 3 月 4 日起,到 11 月之间,获得韩国国土交通部测试牌照的 6 家发展无人车企业或单位,以及这些企业或单位的 11 辆无人驾驶车,总计已经行驶里程超过 2.6 万公里,而且至今在行时途中无发生任何事故。
2016-12-30 07:42:11418 http://softdown.elecfans.net/p/2017/09/无人驾驶的决策规划控制技术2017 无人车作为一个复杂软硬件结合系统,其安全可靠运行需要车载硬件、传感器集成、感知预测
2017-09-28 19:43:460 无人车作为一个复杂软硬件结合系统,其安全可靠运行需要车载硬件、传感器集成、感知预测,以及控制规划等多个模块的协同配合工作。作者认为最关键的部分是感知预测和决策控制规划的紧密配合。狭义上的决策规划控制
2017-11-12 11:30:4612863 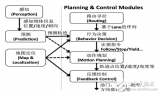
模块化多电平换流器(modular multilevel converter,MMC)在复杂交直流网络中有广阔的应用前景。随着MMC容量和电压等级的提高,MMC的暂态行为对复杂交直流网络的影响不能
2017-12-18 15:49:060 针对行业痛点,目前飞芯电子研发产品采用了连续波载调制或相干外差探测方案,利用焦平面点云测距技术,满足较高的空间分辨率和较大的视场角,探测距离可超过200m,且无需复杂昂贵的机械扫描装置,不断提高系统可靠性,也使获得的图像更为清晰。
2018-08-09 15:20:223372 8月24日上午,7架“无人植保机”在江苏金色农业股份有限公司优质杂交水稻制种基地大丰区三龙作业区上空进行喷洒赤霉素“920”作业,以更好、更及时、更平衡地促进杂交水稻公母本齐穗扬花。
2018-08-28 11:46:272818 将平行智能这一本世纪初提出的原创性研究范式引入车联网领域, 以有效解决时变、异质、复杂交通环境下车联网的建模、规划与决策、优化管理等问题。
2018-10-28 09:51:3417042 
11月30日报道,美国东北无人机空域一体化研究联盟( NUAIR )宣布,目前已成功为小型无人机完成首次新型机载防撞规避系统 ACAS Xu 的验证测试。
2018-12-03 15:01:223413 本文档的主要内容详细介绍的是我国5G无人机的典型应用场景和发展建议资料说明。
2018-12-31 08:57:004982 基于车路协同的重新构建的复杂交通系统,必须采用群体智能协同控制的方式来解决。
2019-01-17 16:11:5710108 
实现无人驾驶是人工智能领域面临的重大挑战之一,应对这一挑战需要发展一种新的图灵测试方法,以测试和验证无人车对复杂交通场景的理解和行驶决策的能力, 进而推动无人驾驶技术的发展。
2019-03-29 15:40:361246 与智能汽车和智能网联汽车相比,无人驾驶汽车需要具有更先进的环境感知系统、中央决策系统以及底层执行系统。无人驾驶汽车能够实现完全自动的控制,全程检测交通环境,能够实现所有的驾驶目标。
2019-07-09 17:17:161910 大疆创新推出的大疆政企版无人机系统,已通过美国内政部的官方测试与独立验证。
2019-07-11 11:08:122163 光伏发电站高电压穿越能力检测应包括光伏发电单元高电压穿越能力测试以及光伏发电站高电压穿越能力验证,其基本要求有以下几个方面。
2020-01-23 17:36:005785 
12月上旬,郑州联勤保障中心组织数家无人机生产制造厂商和多家驻军单位代表,对无人机运输投送指挥控制能力进行实飞验证。
2020-01-05 11:54:26688 该项目将有效提升智加无人重卡导航能力,从容应对全地形和复杂天气状况。
2020-01-13 14:50:462013 10月21日,常态化运营的5G无人公交在苏州落地。这个在苏州高铁新城亮相的无人公交是在开放的城市道路上运行,且速度可达20—50千米/时。这辆无人公交车除了具备避让行人车辆、自动变道、自动转向、红绿灯识别等基本功能,还能应对各类城市复杂交通场景,例如穿行人车混杂的路口、应对后车加塞、“鬼探头”等。
2020-10-30 09:31:211793 城市综合管理平台)提供无人车车端感知数据,为城市交通组织和精细化管理提供决策依据。 “车端感知数据”主要指小马智行自动驾驶车辆在行驶过程中其系统感知的交通路况信息。无论是街道上突然出现的障碍物、暴雨天迅速涨起的
2021-03-05 10:53:181535 为解决无人机集群网络在复杂通信环境中对抗智能性干扰能力较弱的问题,基于智能决策理论,提岀一种多域联合的认知抗干扰算法。该算法在优势演员-评论家算法的基础上,将无人机视作智能体,并由感知到的环境频谱
2021-03-16 10:42:158 车联网环境中,交通系统将长期昰现智能网联汽车和債统人工驾驶车辆混合共存的状况。针对智能网联交通环境下的新型混合车流,建立了车辆的换道行汋决策模型。对于混合车辆交通流引λ最小安全区琙模型,自主车辆交通
2021-05-07 16:18:0613 基于低耗散中兴迎风格式的复杂交通流模型求解
2021-06-25 15:12:473 基于感知体验和主观幸福感的交通出行决策
2021-07-02 15:29:253 在一个与奥迪的联合项目中,罗德与施瓦茨和Vector Informatik一起开发了交通场景C-V2X测试解决方案。
2021-12-08 15:31:401328 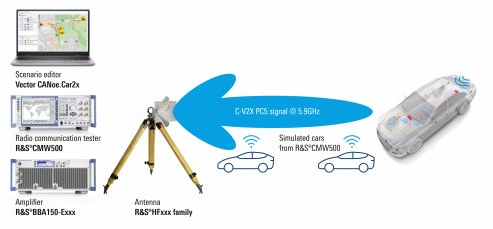
基于图的场景模型捕获关键的设计和验证知识,通过通用模型实现 SoC 项目团队成员之间更好的沟通,减少流程中多个点的人工工作,加快进度,更完整地验证设计以增加获得第一名的机会- 硅成功。
2022-06-28 14:55:27682 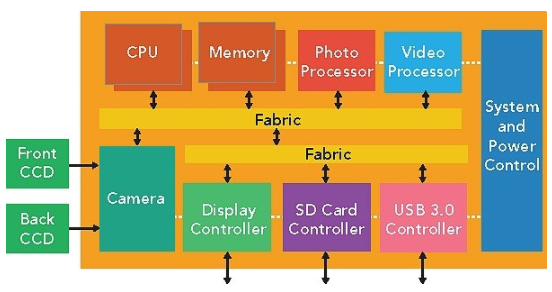
获得许可后,小马智行10辆无人化测试车将在经开区60平方公里的核心区内开始全新的测试形式,覆盖亦庄复杂的城区道路场景,有助于安全可控地提升无人化技术验证的效率,并逐步扩大测试规模和范围。
2022-11-22 10:47:21375 物流园、东海大桥等自动驾驶公开测试道路,路线全程约62公里。图森未来自动驾驶卡车在面对港区和高速、快速道路等复杂路况时展现了强大的处理能力,包括交通信号灯识别、上下匝道、变道行驶、避让紧急车道车辆、应对车道部分封路和大雾侧风天气等场景
2023-06-16 14:37:34353 IP核的开发过程中,面临着许多关键技术,比如IP核的规格定义、基于接口的设计、IP核测试存取结构标准、IP核的验证与打包等。对于IP核的验证,主要是建立参照模型和测试平台,然后进行回归测试和形式验证
2022-06-10 11:50:16373 
IP核的开发过程中,面临着许多关键技术,比如IP核的规格定义、基于接口的设计、IP核测试存取结构标准、IP核的验证与打包等。对于IP核的验证,主要是建立参照模型和测试平台,然后进行回归测试和形式验证
2022-06-13 11:47:03317 
核的不同模块进行实体/块的仿真。前文回顾如何测试与验证复杂的FPGA设计(1)——面向实体或块的仿真在本篇文章中,我们将介绍如何在虹科IP核中执行面向全局的仿真,而这也是测
2022-06-15 17:31:20389 仿真和验证是开发任何高质量的基于FPGA的RTL编码过程的基础。在前文中,我们介绍了面向实体/块的仿真,并介绍了如何在虹科的IP核中执行面向全局的仿真。前文回顾虹科干货|如何测试与验证复杂的FPGA
2022-06-18 15:58:17849 由于矿区环境相对封闭,行驶路线固定且行驶速度慢,但工况复杂、环境恶劣,因此,矿区运输矿卡无人化在矿山场景得到快速推广、规模化落地应用。据了解,2020-2025年是我国矿区自动驾驶的重点建设期,市场
2022-11-22 09:54:45348 
指挥中心,实现对城市交通的监控、分析、调度。 由于城市交通数据量巨大、复杂度高、变化快,传统的交通指挥中心面临着海量数据处理的压力,难以满足实时性、准确性和指挥决策的要求。为了提高信息处理能力,实现数字化转型,巧夺天工
2023-07-14 17:51:46220 三维场景理解与重建技术主要包含场景点云特征提取、扫描点云配准与融合、场景理解与语义分割、扫描物体点云补全与细粒度重建等,在处理真实扫描场景时,受到扫描设备、角度、距离以及场景复杂程度的影响,对技术的精准度和稳定性提出了更高的要求,相关的技术也十分具有挑战性。
2023-08-08 16:58:53636 
LanguageMPC首次将LLM应用于驾驶场景,并设计了将文字形式高层决策转化为可操作驾驶行为的方法。我们定量的证明了LanguageMPC在路口和环岛等复杂交通场景中均优于现有基于学习和基于优化的自动驾驶系统。
2023-10-10 15:57:20347 
,要获得“满意”评价结果除了总分需达到60分以上,还需在 3个子项 (需求理解与测试设计、脚本编写、测试结果)均 达到指定的分数。 易华录产品检测中心以 95高分 完成性能效率测试能力验证,成绩在参与能力验证的全国282家实验室中名列前茅,评价结果为 “满意”
2023-11-14 18:25:01273 随着人工智能(AI)的发展,其在各个领域的应用越来越广泛,从医疗诊断到金融交易,从自动驾驶到智能家居。然而,尽管AI的能力在不断提升,但其决策过程却常常让人感到困惑和不安。那么,我们应该如何理解
2023-11-22 09:39:08209 随着航空业的快速发展,空中交通的复杂性和密度不断增加,对空中交通指挥车的要求也越来越高。讯维车载中控系统凭借其强大的数据处理能力和决策支持功能,为空中交通指挥车提供了高效、准确的解决方案,实现
2024-03-06 16:07:4779
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论