 电子发烧友App
电子发烧友App



前几年自动驾驶还一直是“第一眼”美女,现在变成了“第二眼美女”,并且许多公司频繁出现问题,自动驾驶行业还在寒冬里吗?3月27日,在“2019新智元AI技术峰会——智能云·芯世界”上,驭势科技创始人兼CEO吴甘沙做了主题演讲。
自动驾驶从去年下半年进入“寒冬”,引发出行业诸多怪象:先是Roadstar公司CEO等人宣布罢免首席科学家,造成公司内斗;接着有吴恩达背景的美国自动驾驶创业公司Drive.ai传出“卖身”消息,一时间,曾经屡创融资奇迹的自动驾驶公司频繁出现问题。
自动驾驶行业到底怎么了?
3月27日,在“2019新智元AI技术峰会——智能云·芯世界”上,驭势科技联合创始人兼CEO吴甘沙做了主题演讲。
吴甘沙 驭势科技联合创始人兼CEO
他认为,前几年自动驾驶还一直是“第一眼”美女,现在变成了“第二眼美女”:刚看上去一般般,但是越看越好看、越看越耐看,无人驾驶就处在这样一个阶段。
在“第二眼美女”阶段,行业应该怎么向前走?Waymo这个L4的带头大哥的商业模式行不行得通?
我们从吴甘沙的演讲中寻找答案,以下是他的演讲全文。
不存在自动驾驶摩尔定律,Waymo也进入深水区
非常感谢新智元搭建这样一个平台,能够和一些老朋友再一次相见。
今天有人说无人驾驶变成了“第二眼美女”,什么是“第二眼美女”呢?就是刚看上去一般般,但是越看越好看、越看越耐看,无人驾驶就处在这样一个阶段。
当然,前几年还一直是“第一眼”美女,这几年当中发生了什么呢?
大家来看这个标题(下图),这是去年9月份,很显然是“第一眼美女”的范儿,无人驾驶时代变革马上就要开始了,商业模式、盈利模式都能够找到了。
但是下面就是去年年底的一个题目,Waymo One是世界上第一个无人驾驶的服务,但是试过两次以后就觉得人们已经对未来感觉有点枯燥。另外一个媒体的报道说无人驾驶距离完美还差得很远,然后就出现当地的居民去扎它的胎,拿着枪对着它的车加上拦它的路,出现了很多问题。
这些问题很大一部分原因还是我们的技术做得不太好,人们说这种车太保守了,很大程度上影响了交通秩序。其实这个题目说得非常尖锐:Waymo会不会像以前的Xerox PARC实验室昙花一现呢?另外一个无人驾驶领域的领先玩家就是GM Cruise,2018年3月说19年要商业化,到10月份的时候路透社报道说Nothing is on schedule,2017年底说2018年每个月要跑100万英里,实际上2018年全年只跑了40多万英里。
UBER的很多信息一直到准备IPO时才披露出来,请看一下2016年时他们的乐观预测。1月时预测2018年无人驾驶就能够帮助UBER盈利,当年5月份预测2019年UBER会有1.3万辆自动驾驶的出租车,8月份把OTTO收购,认为这个进程会加快一到两年,9月份修改预测,认为2019年达到7.5万辆无人驾驶出租车,基于这些预测,2017年11月份时宣布要购买2.4万台沃尔沃,建立无人驾驶车队。
今天来看,很显然,这些玩家都太乐观了,实际上Robo-Taxi路还很长,Waymo实现了1.1万英里才有一次接管,但是跟美国人类驾驶员的水平比起来,20万英里出1次保险,50万英里1次警察干预,100万英里1次受伤事故,9400万英里1次致命事故,差距还是很大,Waymo今天一共才开了2000万英里而已。
前面有一个创业公司的老板说:我们无人驾驶当中会不会有摩尔定律,每16个月,每次接管之间的行驶里程能够翻一番?
他试图根据前面几年的数据推出这样一个摩尔定律,但事实上并不存在。
我们把Waymo的数据整个拿出来,每个月的数据都进行分析。橙色的曲线是每个月干预的数据,有的月份特别好,比如2015年底的时候已经能够实现接近2万英里1次干预,但马上又掉下来了,2017年最多能够实现3.5万英里1次干预,但马上又掉下来了,整个2018年一直在起伏,所以并没有形成一种明确的越来越好的趋势。

蓝色的柱状图是每个月跑的里程,真正上量的是2018年后半年,每个月最多达到20多万英里的里程,这个数据非常了不起。美国加州的数据显示,除了Waymo和GM Cruise之外,所有其他的玩家每个月行驶里程平均下来是943英里,就是其他的玩家的测试强度远远落后于Waymo。
那么Waymo到底因为什么原因出现人工接管?
决策问题有46%,预测错误大概占到4%,行人一些不理性的行为占到19%,加起来差不多是70%,这些大致都可以归为决策的问题,而感知出现漏判只有25%。
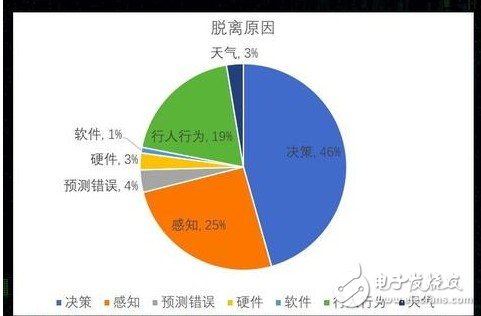
今天我们说某家公司多牛,深度学习网络能够对几千万张图片进行训练,可以识别很多物体,其实这些并不是无人驾驶下一个阶段的重点,下一个阶段的重点是决策,复杂环境当中的决策。Waymo作为一个行业当中的领导者,已经真正进入了深水区,现在很多公司还在谈感知的成功率是多少,其实还是处在早期。
但是Waymo这样的场景在中国根本玩不转,这是在美国进行测试的场景,一个很直观的感觉就是路上人很少,车也很少。
Waymo面对的交通环境
那么再看一看国内无人驾驶的路测,这种场景的复杂度要是十倍以上,大家第一眼看上去就是很多很多的车,还有人车混行的环岛,横冲直撞的电动自行车,越过双黄线加塞的车,对面过来强占我们车道的车,等等。这让Robo-Taxi的产业化更难。
国内自动驾驶公司遇到的交通环境
无人驾驶为什么知易行难?
现在我们分析一下无人驾驶为什么知易行难,主要有几个问题的原因:
首先这是一个2B业务。大家经常说2C是赢家通吃,2B很难赢家通吃,因为2B的性质就是生长得慢,但可以活得长。
其次就是短板效应。互联网创业经常说长板效应,一两个点特别强,一招鲜吃遍天,其它的差一点也无所谓,无人驾驶就是短板效应,只要一个地方短了,马上整个商业化过程都推迟。比如我们做无人车,哪怕把大脑做得再发达,小脑就是执行机构,如果执行机构没有冗余就没法大规模商业化。这个行业最领先的是博世,他们带冗余的执行机构要到好几年年以后才出来,所以就是短板效应。
我们要做的事情是关键的任务,关键任务就有一个开发规律,叫做90/10,即使完成了90%,剩下的10%很可能还需要90%的时间,这就是关键任务。我们经常说一个女人九个月生个孩子,但九个女人不可能一个月生个孩子,因为这种技术有其固有的节奏和规律,更多的钱和人也无法加速。
最后就是鸡和蛋的问题,现在这个系统比较贵,所以无法大规模应用,正因为量小所以成本降不下来。
我问我的女儿先有鸡还是先有蛋?女儿很聪明,她说先有蛋,因为恐龙蛋出现在鸡前面。这就给了我一个启示:我们做这个事业是可以沿途下蛋的,一开始下的可能不是鸡蛋,而是恐龙蛋,至少能够让这件事情做下去。
“第二眼美女”怎么才能越看越好看?
“第二眼美女”怎么才能越看越好看?我们列了这样三个可能性:
第一个第二眼美女的特质,要看特斯拉。
特斯拉的绝招是什么?无人驾驶要在统计学意义上证明开的安全需要多少里程?
95%的置信度证明无人驾驶比人驾驶安全需要110亿英里,也就是如果有100辆车,不吃不喝不睡连着开500年才能开到110亿英里。Waymo现在1000辆车,每个月跑100万英里需要开900年才可以,下一阶段Waymo要采购8.2万台车,如果每个月开8200万英里要开11年。
这是特斯拉2016年出现一次致命事故以后给自己辩解:你们这些家伙都是键盘侠,我开了1.3亿英里才撞死1个人,美国的平均水平是9400万英里死1个人,不是已经很安全了吗?夫复何求呢?
但是特斯拉错算了一点,就是没有统计学意义上的置信度:如果第二天再死一个人就是1.3亿除以2,变成6500万英里了。
今年特斯拉根本没有做路测,录入的数据是零,但同时又说有几十万辆车在路上不停地跑,就是影子模式下面进行路测。
什么叫做影子模式?就是驾驶员在开车,但是算法在后面的影子里面跑,然后把算法的结果和人的结果进行比较看一看好不好,不好的话就重新训练。
现在其实我们也在试图做这样一个方向,这是我们和一家主机厂的广告,广告里面有一句话叫做面向未来的自动驾驶优化提升。
这是什么意思?其实就是影子模式,我们把它叫做SIP,首先是Scoring,要对驾驶员行为打分,也要对环境数据有效性打分;Imitation就是进行模仿,对复杂环境中的决策行为进行模仿学习,然后可以进行平行的驾驶,也就是Parallel Driving。
我们把这个叫做草船借箭,借壳上市。草船借箭首先是要有船,就是大批量生产的量产车,然后才能借到箭,也就是数据。我们需要借壳上市,所谓壳就是便宜可靠、又能跑影子模式的控制器,然后才能上市,通过影子模式做新算法的迭代验证。
这种东西知易行难,因为要让主机厂量产车安装这些东西谈何容易?
现在我们已经开始和一些主机厂部署这样的系统,车辆进入停车场就变成无人驾驶,自己寻找停车位,停车场当中完全是无人驾驶,但是一出停车场,是驾驶员开,开的时候就在跑右边这样一个算法,在影子当中去跑,和人开的进行比较,这样才能帮助我们快速地获得数据,进行不同路况下面的算法实车验证。
第二个第二眼美女的美,来自垂直细分市场的曲径通幽。我们可以沿途下蛋,找到商业化机会。但我想和大家分享的是,哪个蛋都不容易下,大家不要觉得有些场景环卫车、配送车、物流车没有人在上面就好做,其实每个蛋都不容易下。
关键就是找到真实的需求,很多需求客户向你要的并不一定是真实的需求。其次,这个帐也要算得过来。大帐要算,小帐也要算。大帐就是整个市场到底有多大,能够占有多少市场份额,小帐就是每一台车多少钱,是不是真正能够给客户带来价值。第三,技术要能够确保无人化,如果车上还坐着一个安全员,那是无人驾驶吗?不是无人驾驶,能够给客户带来价值吗?能省钱吗?能解决人力短缺的问题吗?解决不了。
我们选择了这样一个市场,机场物流,我们认为是真实的需求:
真正能够跟客户算清楚这个帐,能够取代三个人的司机成本,能够解决招不到人的问题。我想和大家分享的就是未来1、2个月,这样的车真正在机场进入无人化的试运营阶段。大家知道机场的场景其实是非常复杂的,夏天特别热,暴雨暴晒,各种隧道、斜坡等等,其实真正把这种技术做好也是非常不容易的。
第三个第二眼美女的可能性,来自仿真世界的破碎虚空。比如我们做自动泊车,天下有千千万万的停车场,每个停车场都不一样,怎么办呢?其实可以在虚拟世界当中建立虚拟的停车场,这种技术和三维重建有关系,也和平行世界有关系。
虚拟停车场应用的技术一大部分就是三维重建技术,要用今天可量产的传感器,能够对真实世界进行重建。另外一种技术其实是AI创造的技术,最近大家经常看到用生成性对抗网络创造出来并不存在的脸、并不存在的车,这些东西其实都是可以在这样一个环境当中进行设计。
我们可以把停车场的一些共有的因素变成一个素材库,变成一个Building Block,通过很多刚才讲的技术融合起来,这样就可以生成各种各样的虚拟停车场。在虚拟停车场中做代客泊车的测试。
最后和大家分享一下我们的策略:我们和主机厂、领先机场等头部客户协同创新,沿途下蛋。产品力和数据力缺一不可,现在我们的想法是以小带大,就是利用我们可量产的技术,像L3和自动泊车,带上影子模式,同时用草船借箭、借壳上市的方法借到数据,然后在这个壳里跑我们真正的L4算法验证。垂直细分市场是每一个蛋都不容易下,三千弱水,只取一瓢,我们只找一到两个场景,做行业的第一。
L4商业化落地今天没有讲,但我想跟大家做一个预告,最近两天在海南博鳌有无人驾驶的试运营,里面好几款车当中有我们的无人驾驶系统提供支持。
要做这么多的事情也并不容易,我们把它形容成烤肉,我们大的研发体系是一个自动烤架,上面放三个肉串同时在烤。
我们经常说聚焦,就是只烤一串肉,但这一串肉很长,烤的时间很长,如果我们能够把研发时间和资源利用好同时烤三串肉就可以获得最佳的收获。
我们经常说无人驾驶有电车难题的问题,到底是装五个人还是装一个人?很多人都在讨论,但前提是什么?这辆车的刹车失灵,我们不讨论这样的问题,我们讨论的是怎么把刹车解决,所以在这样一个大机会时代,我们不要做机会主义者,不空谈,而是从Basics开始做起,真正把安全做好。
在低头赶路的同时,也要抬头看天,可以说今天的无人驾驶技术并不是终极的技术,未来几年或许会有换道超车的技术一夜间出来。我这里列出了无人驾驶技术未来的几个趋势。今天我们开几十亿、几百亿英里才能训练好一个无人驾驶系统,但是人在驾校学几十个小时、在路上开几百公里就可以开得非常好,为什么?因为我们人的智能要比今天的人工智能好,所以这些都是我们下一步要探索的课题。
最后做个总结。2017年底时无人驾驶空前乐观,我引用杨万里的诗,希望大家意识到前途还有很多没有解决的问题。
莫言下岭便无难,赚得行人空喜欢;
正如万山圈子里,一山放过一山拦。
在不断走入深水区的过程当中,现在整个外部环境显得有点悲观,但这个时候我认为反而不应该悲观。这里我引用王安石的这首诗。
飞上善来千寻塔,闻说鸡鸣见日升;
不畏浮云遮望眼,自缘身在最高层。
好比希腊神话中的白银时代,人们拥有了比黄金时代更强大的理论,但却失去了对时代的判断,对神的信仰产生了动摇。我觉得碰到这些问题都是正常的,下面的风景是会越来越好。第二眼美女,才是真正有内涵、喜欢长久的美女。


























 工商网监
工商网监
评论