本文提出了一种用于具有双目视觉的自主机器人的三维语义场景感知的端到端流程。该流程包括实例分割、特征匹配和点集配准。首先,利用RGB图像进行单视图三维语义场景分割,将2D数据集中的常见对象类封装为物体实例的点云。
2024-02-21 15:55:38 148
148 
的RGB-D物体识别及场景理解 报 告 人:黄凯奇 中科院自动化所 报告摘要:物体识别与场景理解一直是计算机视觉的重要研究内容。近十年来,基于RGB图片的2D语义理解一直占据最主流的研究方向。由于
2017-03-22 17:16:00
3D图像的主流技术有哪几种?Bora传感器的功能亮点是什么?
2021-05-28 06:37:34
7大主流单片机优缺点对比分析哪个好?
2021-11-02 08:27:01
我从英特尔 - RealSense-D400系列 - 数据表.pdf第94页的图纸中推测,深度传感器的中心距摄像机右侧(USB侧)37.5毫米:根据经验,我推断深度图焦点X在相机的脸后面约32mm
2018-12-05 10:52:34
LCD的接口有多种,分类很细。主要看LCD的驱动方式和控制方式,目前手机上的彩色LCD的连接方式一般有这么几种:MCU模式,RGB模式,SPI模式,VSYNC模式,MDDI模式,DSI模式。MCU
2020-08-06 10:07:08
`RGB接口静电放电防护方案描述:RGB 接口就是分三原色输入的视频接口,称为色光三原色,分别为红、绿、蓝,使用加色法,直接通到我们的人眼,比如屏幕显示。其数值为 R:0--255G、0--255
2017-04-21 14:40:57
`方案简介使用CSU8RF2111制作的具备记忆功能RGB灯。通过红外摇控控制RGB 灯,发出不同颜色的光。方案特点可在直流、交流电源下工作;可发出16种色彩光,4种色彩变化的光,并具备4 级亮度
2014-01-09 15:53:49
DL:主流深度学习框架多个方向PK比较
2018-12-26 11:10:18
主流CAN收发器性能对比分析哪个最好?
2021-05-20 06:14:37
主流宽带电力载波芯片对比 主流宽带电力载波芯片对比 特点INTELLON,200MbpsDS2,200Mbps  
2010-04-02 11:22:10
主流的三种RF方案及其优缺点对比分析RF IC的主要性能是什么?
2021-05-25 06:34:17
LCD的接口有多种,分类很细。主要看LCD的驱动方式和控制方式,目前手机上的彩色LCD的连接方式一般有这么几种:MCU模式,RGB模式,SPI模式,VSYNC模式,MDDI模式,DSI模式。MCU
2020-10-09 09:57:36
Viewer的版本是v.2.16.0。相机D435无法正常工作。“rs2_create_device中的未知(info_list:0000014D8863C480,索引:0):无法初始化扩展控件
2018-10-30 11:30:35
相机包带加厚肩带 摄影包相机包电脑包减压弹力单肩带 背带金属扣
2023-03-28 13:03:52
Semiconductor)芯片的相机。它具有高的图像稳定性、高传输能力和高抗干扰能力等特点。2、方案概述Ameya360 工业机器视觉相机主要由控制模块(Control Block)、相机模块(Camera Block
2018-04-08 17:10:23
DMA2D 可以将图像从 (480*640) RGB565 缩放到 (480*800) RGB565 吗?
2022-12-28 07:26:47
您好,我是一个学生,我在Unity的应用程序中使用SR300相机(面部跟踪)。我买了一台D435来取代我的旧相机,但这款新相机没有“面部跟踪”。所以我尝试在我的系统中放入新的相机,或者向旧的sdk
2018-12-05 10:51:17
。如何在UPBoard上使用D435相机获得30fps的速度?以上来自于谷歌翻译以下为原文We have an UP Board, and a D435 camera. The D435 Camera
2018-11-16 11:22:11
目前我们想做一个产品,把USB的相机(相机需求单独驱动)的数据在相机模块端转成以太网数据,通过以太网cable连接到电脑上,有几个问题想请教:用哪颗芯片软件端是否有成熟方案是否支持Win,Linux,嵌入式等多平台速率多少?USB2.0还是能到3.0小白问题,先感谢大牛回答!
2022-09-29 08:16:09
散热器,可支持7x24小时工业环境下工作。免费提供CV2880主芯片资料、软件研发底层SDK、样片和开发工具等,至于工业相机的上层具体内容如十字线等软件应用功能需要用户自行开发,目前支持的数家工业相机厂商成品早已量产上市,其性价比在目前主流相机方案中首屈一指。
2018-09-13 15:13:28
模型在HiSpark AI Camera上的性能表现,并与当下流行的几种方案对比 4、实现基于HiSpark AI Camera的ADAS项目,并满足以下功能:4.1、司机疲劳驾驶检测4.2、自动休眠
2020-09-25 10:12:07
通信技术发展的日新月异,对深度覆盖的要求越来越高.什么是TD-LTE深度覆盖解决方案?这些方案有什么优势?
2019-08-14 07:35:24
你好在我的应用中,我想跟踪直径在2-5毫米,相机距离最大0.8米的小球的位置。相机是否适合用于此目的,还是有更好的替代方案来解决我的问题?相机噪音有多大问题?我读到了,那是400系列的问题。这种
2018-10-23 10:38:38
如何切实的保护开发的产品呢?当前主流方案有哪些?
2017-04-18 16:25:15
Python在国内逐渐崛起和被追捧的原因?用Python可以做什么?几款主流的Python开发板对比分析哪个好?
2021-10-26 07:06:46
大家好,我想弄清楚哪个相机(realsense D415或realsense D435)在阳光下具有最佳性能,可在2到5米范围内进行深度感知和物体识别。我已经阅读了规格,但似乎intel D
2018-11-20 11:34:48
引导语:本文为“3D视觉创新应用(三维重建)竞赛”作品集系列之一,该作品由来自深圳大学团队完成,团队成员:赵晨昊、张曼英、周制黔、郭...
2021-07-02 06:56:13
。MV-D1024E是基于CMOS的高帧频系列相机,具有CAMERA-LINK接口。CAMERA-LINK是一种丁业应用的高速数据连接协议,可为CCD或CMOS等数字式相机与图像采集系统间提供简单、灵活的通信接口。
2019-10-31 07:02:32
的数字分析和处理。MV-D1024E是基于CMOS的高帧频系列相机,具有CAMERA-LINK接口。CAMERA-LINK是一种丁业应用的高速数据连接协议,可为CCD或CMOS等数字式相机与图像采集系统
2019-07-02 08:11:34
我从realsense查看器中获取d435深度相机的数据,当我保存深度图像的快照时,我在规格中得到8位(1-256)灰度图像,据说相机给出了16位深度图片。你知道我怎么能得到16位图像?以上
2018-11-27 14:11:37
基于RGB-D相机与机械臂的三维重建无序抓取系统有哪些关键技术?如何去开发一款基于RGB-D相机与机械臂的三维重建无序抓取系统?基于RGB-D相机与机械臂的三维重建无序抓取系统是由哪些部分组成的?
2021-09-08 06:12:06
嗨,我买了一台D435相机。我想要校准D435相机与其他设备的相对位置,所以我需要测量D435的RGB相机和深度相机之间的相对位置以便进一步完成工作。所以我想问这是否确实得到了一个确切的参数或方法
2018-11-27 14:16:59
软件应用功能需要用户自行开发,支持的数家视频展台厂商成品已经量产上市,其性价比在目前主流相机/展台方案中首屈一指。
2016-11-02 10:03:22
你好,我正在使用librealsense 2.16.0.221和D430相机型号。我想知道,从我的应用程序来看,相机是否已经在使用中(例如,在RealSense Viewer内或其他应用程序中打开
2018-11-09 11:33:42
这里有人有通过WiFi访问D415(或其他RealSense相机)的经验吗?在我必须使用2个或更多深度相机一起工作的场景中,UpBoard是唯一(或者最佳......)方式吗?感谢您的任何想法,评论
2018-11-09 11:30:33
`数字对讲机主流方案`
2015-11-24 11:16:09
有没有办法为D435创建深度pointcloud的边界框?我正在使用ROS相机。以上来自于谷歌翻译以下为原文Is there a way to create a bounding box
2018-11-20 11:27:16
如题,找全景360度工业相机方案商,电路开放的方案公司。不要PCBA模组
2016-10-21 10:18:01
嗨罗伯特,你能推荐一下吗?合适的相机最小尺寸,H264压缩由Raspberry Pi3连接和控制?适用于Raspberry Pi 3 B控制和相机命令的软件?谢谢彼得以上来自于谷歌翻译以下为原文Hi
2018-10-23 11:41:59
“嗨,很久以前我安装了我的英特尔实感SDK以便使用D435相机。我看了一下”英特尔实感SDK 2.0的示例“。我非常关注”捕获“和”保存技术“两个例子,通过Visual Studio分析代码。我
2018-10-18 14:13:50
请问现在CNC机床伺服电机主流的中高级控制芯片是那颗料?谢谢!
2020-05-07 09:42:37
目前,比较高端的车在主机主流芯片
2017-06-03 15:22:37
你好,我正在使用英特尔实感D435,当我拍照时,我总是在图像的边框上出现错误的信号,就像我附加到你这个案例的图像一样,在我用蓝色环绕的部分。相机认为这些部件非常深,产生的点云非常糟糕,我总是需要手动
2018-10-16 14:57:57
嗨,我需要一台可以获得未压缩/未处理RGB / IR流的相机。通过未经处理,我不是指原始拜耳,而是至少一个原始RGB流,其中自动图像调整功能被禁用。(例如,自动快门,自动白平衡,自动增益,自动曝光
2018-10-29 14:25:11
D130S型3D相机采用主动式深度感知技术,它采用激光光源和MEMS微振镜模组作为投影模组,将可编码的条形结构光投射于物体之上,并由成像设备采集并传输给计算单元,生成点云图像。即其原理为通过在成像
2022-01-29 13:40:52
700mm-2000mm工作距离内可快速精准实现物体的三维点云重建,且该相机内部集成计算单元,配合千兆网线,可同时输出点云图、RGB、深度图、灰度图四种数据流。亚毫米级深度精度(0.
2022-03-21 16:16:04
700mm-2000mm工作距离内可快速精准实现物体的三维点云重建,且该相机内部集成计算单元,配合千兆网线,可同时输出点云图、RGB、深度图、灰度图四种数据流。亚毫米级深度精度(0.
2022-06-15 14:44:13
吉系列工业面阵相机 经济型工业面阵相机支持自动或手动调节增益、曝光时间等千兆网接口,无中继情况下,最大传输距离可到 100m支持硬触发、软触发以及自由运行模式应用于电子半导体、工厂自动化等领域
2023-09-20 14:59:08
主流防抖数码相机大拼比
提及防抖数码相机,大家已经并不陌生了,这个词汇早在1994年就已经出现,下面我们先了解下防抖的有关信息。最早推出防抖
2009-12-18 16:39:15368 数码相机与传统相机的区别是什么?
数码相机也叫数字式相机,英文全称Digital Camera,简称DC。数码相机是集光学、机械、电
2009-12-19 09:45:385626 主流数码相机
2009-12-19 09:48:52481 引 言
高速数据采集系统可对相机采集得到的实时图像进行传输、实时处理,同时实现视频采集卡和计算机之间的通信。系统连接相机的接口用的是Camera Link接口,通过Camera L
2010-07-28 16:10:3110752 
Delphi教程调整图片的RGB对比度,很好的Delphi的学习资料。
2016-03-16 14:55:34 4
4 camera
2017-01-31 21:18:190 针对传统的颜色一深度(RGB-D)图像物体识别的方法所存在的图像特征学习不全面、特征编码鲁棒性不够等问题,提出了基于核描述子局部约束线性编码( KD-LLC)的RGB-D图像物体识别方法。首先
2017-12-07 10:22:311 2. RGB-D是一种特殊的相机,它不仅能捕捉深度信息(D)还能捕捉图像颜色(RGB)。而且它还能捕捉到和2D相机一样的彩色图像。大多数RGB-D传感器是通过“结构光”或“飞行时间”进行工作。你可能
2018-08-31 09:59:268953 据外媒报道,微软已申请了一项被称为“深度多光谱”相机的专利。该专利有望用于未来的Surface设备上,包括Surface Duo和Neo。据介绍,微软研发的这项多光谱相机在某些方面要胜过苹果的TrueDepth相机。
2019-12-16 11:21:192373 3D相机的不同之处在于,它可以测量普通数码相机无法测量的深度数据。所谓深度数据,就是像素到相机的距离。所以3D相机可以获取四个值,分别是RGB值和深度信息,即RGB-D。
2020-09-24 12:40:1616279 RGB-D图像其实是两幅图像。
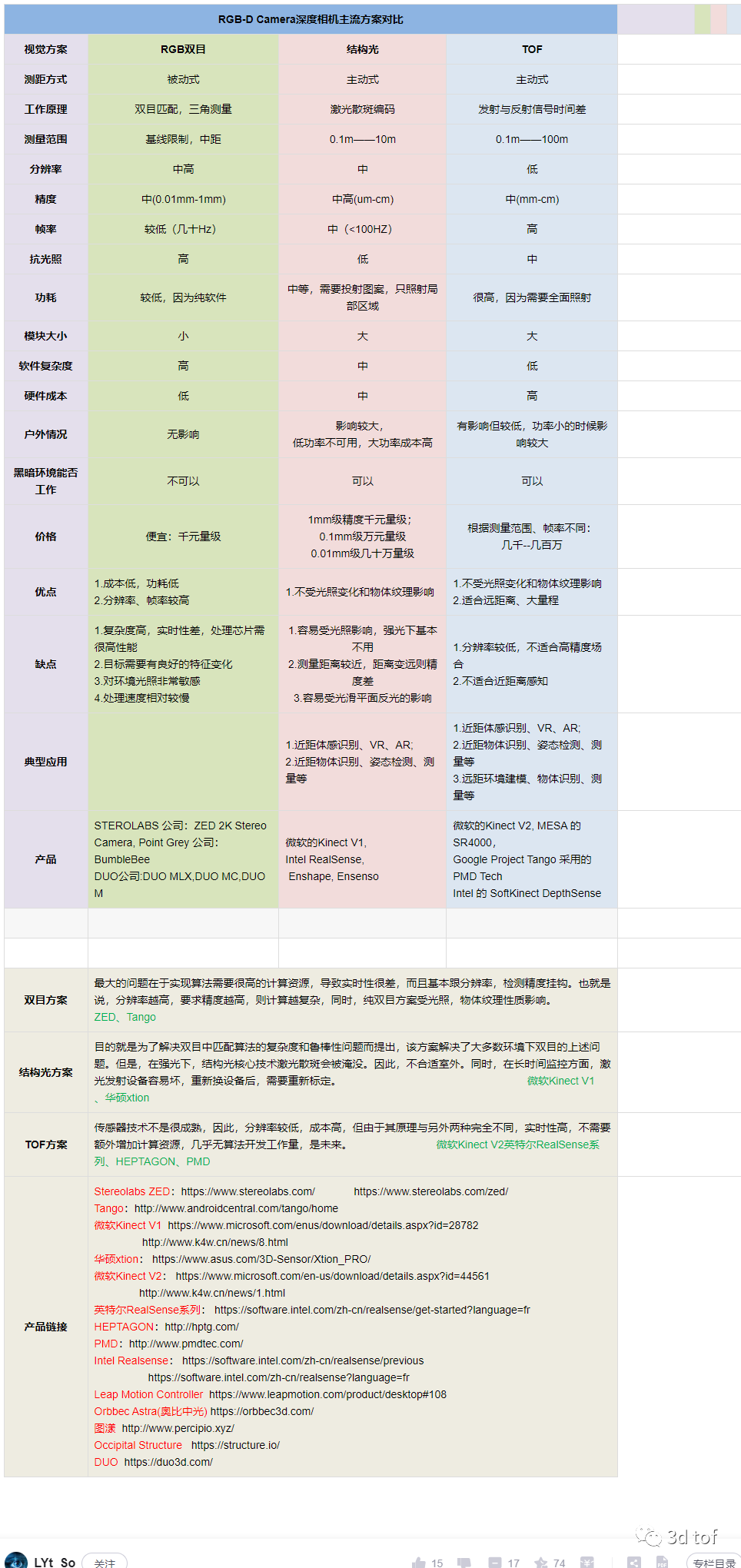
2020-11-01 11:46:4916564 上一期小编给大家介绍了TOF 与双目结构光的对比,那在深度相机的应用方案种还有结构光的摄像方案。今天小编就跟大家来聊一聊结构光,顺便也捋一捋这三者的对比。 结构光 结构光技术就是使用提前设计好的具有
2020-11-19 14:37:192893 RGB-D图像显著性检测是指在传统的2D图像中附加深度信息从而提取显著对象,但是现有的显著性检测模型,大多数只关注显著物体本身,却忽略了背景信息。因此,提岀了一个新颖的昰著性检测模型,将深度信息同时
2021-04-13 11:31:250 的思想,仅消耗极少部分的计算资源就可以将各个传感器融合起来,提高了系统精度。实验结果表明,该方法可以将定位误差抑制在10cm以内将偏转角误差抑制在1以内,彻底解决单一RGB-D摄像头SLAM时跟踪失败的问题。
2021-04-25 14:47:5414 红-绿-蓝(RGB)相机被机器视觉制造商广泛使用。这些相机很适合根据物体的形状和颜色来表征物体。然而,由于只有三个可见波段可用,他们的识别能力是最小的。 高光谱相机可用于更高要求的应用,通过记录
2022-04-25 10:17:483486 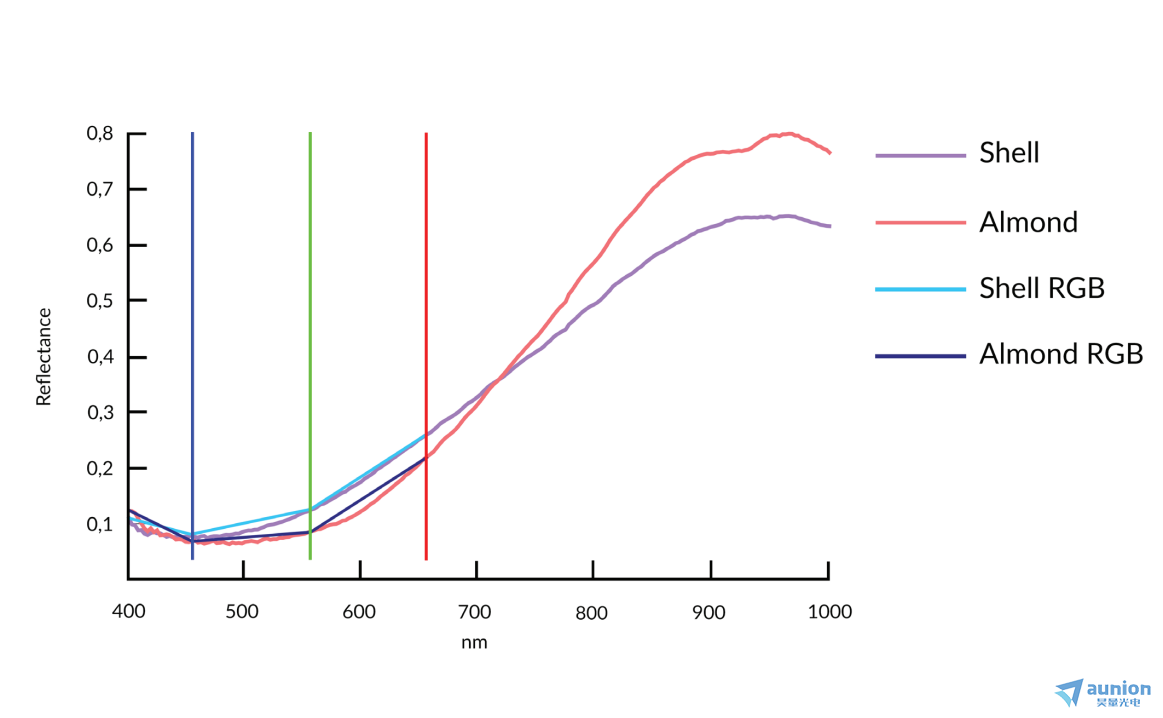
Lollipop 起便包含在 Android 中的框架 API,CameraX 是在 Camera2 之上运行的 Jetpack 支持库,可供所有 Android 开发者使用。这些互补的解决方案可满足 Android 相机生态系统的各种需求。
2022-06-21 11:21:42746 数据集对于使用深度学习训练和测试3D分割算法至关重要。然而,私人收集和标注数据集既麻烦又昂贵,因为它需要领域专业知识、高质量的传感器和处理设备。
2022-11-04 11:36:081082 随着3D采集技术的快速发展,3D传感器变得越来越可用且价格实惠,包括各种类型的3D扫描仪、激光雷达和RGB-D相机(如Kinect、RealSense和Apple深度相机)。
2022-12-09 09:21:361297 AMAZINGIC晶焱科技(KOYUELEC光与电子):IP Camera LAN Port ESD/Lightning保护方案及应用!
2022-12-30 15:09:341702 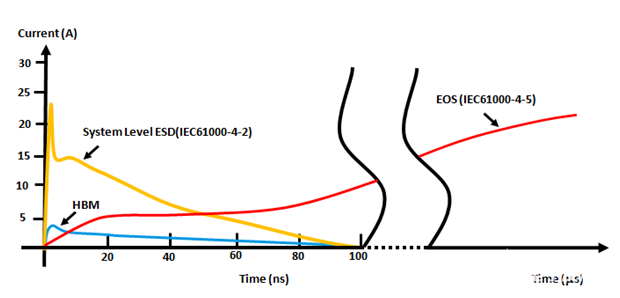
我们提出了GO-Surf,一种直接的特征网格优化方法,用于从RGB-D序列中准确和快速地重建表面。
2023-03-17 16:35:46446 输入数据流不同。在基于RGB-D相机的三维重建中,输入有深度信息和彩色信息,并且深度信息起主导作用,而在SLAM和SFM算法中输入的是主要是彩色信息,个别工作也有结合深度信息。
2023-03-23 12:28:511007 当我们要记录的信息更多时,一个字节就不够了。 在RGB-D相机的深度图中,记录了各个像素与相机之间的距离。这个距离通常是以毫米为单位,而RGB-D 相机的量程通常在十几米左右,超过了255。
2023-05-15 11:33:22414 
常见的消费级RGB-D相机具有粗略的内参和外参校准数据的,通常无法满足许多机器人应用所需的精度要求。
2023-05-23 09:28:201000 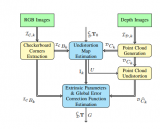
概述:本文重点讨论自动驾驶中camera主流方案,主控soc上mipi_csi2搭配max96712的camera完整链路软件框架和实现方案,主要讨论了GMSL1和GMSL2两种方案,
2023-06-06 10:01:381 维感科技于近期正式对外发售极具性价比的3D ToF RGB-D深度相机新品DS86/87,零售价格分别为4,199元与4,999元。
2023-06-16 09:40:26285 
虹科致力于为用户提供最优的机器视觉解决方案。本文将用虹科的AI深度相机与英特尔的深度相机来做图像的对比测试,那么它们有哪些性能差异呢?虹科深度相机HKOAK-DPro有两个核心功能:红外激光点阵
2023-04-20 09:34:06770 
高光谱相机(Hyperspectral Imaging, HSI)是一种具有非常高光谱分辨率的成像技术。它能够捕获到一个物体的大量光谱特征,从而对物体进行深入的物理或化学属性分析。在烧伤深度检测
2023-06-30 11:59:55363 
传统的RGB彩色普通相机称为2D相机,只能拍摄相机视角内的物体,没有物体到相机的距离信息,只能凭感觉感知物体的远近,没有明确的数据。而RGB-D深度相机(又称3D相机,其中D代表Depth为深度信息
2023-07-06 10:22:18497 
大多数现有的视觉SLAM方法严重依赖于静态世界假设,在动态环境中很容易失效。本文提出了一个动态环境下的实时语义RGB-D SLAM系统,该系统能够检测已知和未知的运动物体。为了减少计算成本,其只对
2023-08-25 16:49:47274 
为托盘对接、料笼堆叠等高精对接应用打造的工业RGB-D相机。不仅提供卓越的RGB,点云融合3D数据,还搭载性能强大的算力平台。可自动识别市面主流托盘、料笼,引导移动机器人完成作业。
2023-09-12 11:15:54427 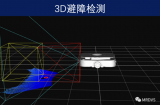
提出了一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统,该系统由完整的前端和后端模块组成,包括里程计、回环检测、子图融合和全局优化。
2023-11-29 10:35:18189 
随着激光雷达传感器(“光检测和测距”的缩写,有时称为“激光扫描”,现在在一些最新的 iPhone 上可用)或 RGB-D 摄像头(一种 RGB-D 摄像头)的兴起,3D 数据变得越来越广泛。D 图像
2024-01-03 10:32:10207 
视觉相机是机器智能/自动化的关键,NVIDIA Jetson支持多个合作伙伴的Camera,这些相机包括USB、以太网、MIPI等接口的相机。
2024-01-04 09:51:36921 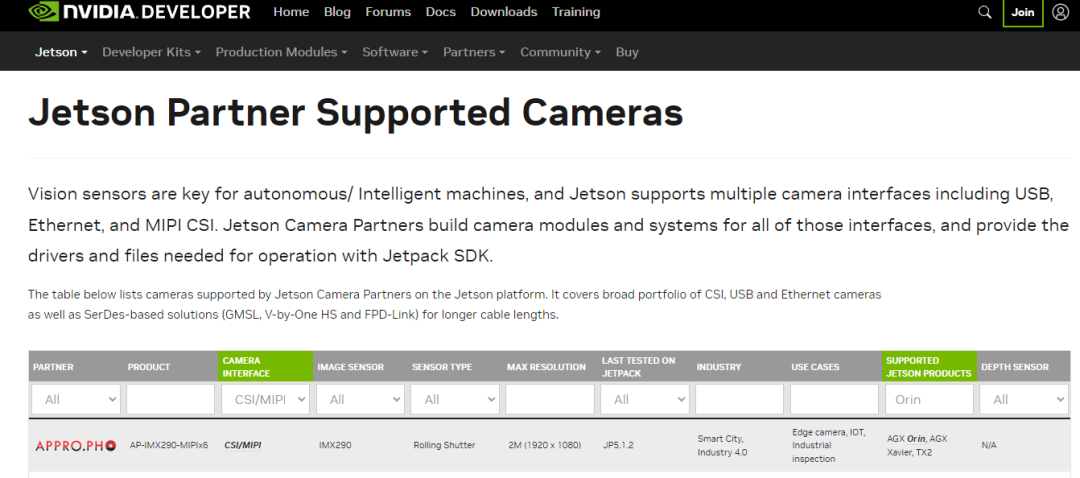
 电子发烧友App
电子发烧友App





 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号




评论