特征点法的VSLAM系统中,特征点并不是越多越好;相反, 少量 并且 质量高 的点会让这个SLAM系统位姿精度更高,且消耗更少的存储资源和计算资源。
2022-08-23 11:09:48 1200
1200 本文的优势不仅包括讨论A-SLAM的内部组成部分,还包括其应用领域、局限性和未来前景,以及对过去十年A-SLAM进行全面的统计调查。
2023-03-17 10:44:57504 上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上周的组会汇报总结一下。 这次汇报的题目我定为“视觉SLAM:一直在
2023-08-21 10:02:071574 
神经隐式表示已经被探索用于增强视觉SLAM掩码算法,特别是在提供高保真的密集地图方面。
2024-01-17 10:39:50442 
SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。 其实,SLAM≠机器人自主定位导航 ,不解决行动问题。 SLAM如其名一样,主要解决的是机器人的地图构建
2018-08-24 16:56:24
常有必要的 。 回环检测失败 如何提升机器人回环检测能力? 那么,怎么才能让机器人的回环检测能力得到一个质的提升呢?首先要有一个算法上的优化。 1. 基于图优化的SLAM算法 基于图优化
2019-03-06 15:38:04
近年来,由于扫地机的出现使得SLAM技术名声大噪,如今,已在机器人、无人机、AVG等领域相继出现它的身影,今天就来跟大家聊一聊国内SLAM的发展现状。 SLAM的多领域应用SLAM应用领域广泛,按其
2018-12-06 10:25:32
无人机在飞行的过程中需要知道哪里有障碍物,该怎么规避,怎么重新规划路线。显然,这是SLAM技术的应用。但无人机飞行的范围较大,所以对精度的要求不高,市面上其他的一些光流、超声波传感器可以
2020-12-01 14:26:37
研究生期间进行了基于2D激光雷达的SLAM的研究,当时主要做了二维激光雷达的数据处理。小弟不才,没有入得了SLAM的坑,却一直谜之向往,如今得以机会,决定正式迈出第一步,彻底进入SLAM的坑!心中
2021-08-30 06:13:31
导读:UPS是系统集成项目中常用到的设备,也是机房必备的设备。本文简单介绍了UPS的种类、功能、原理,品质选择与配置选择方式,基础维护等相关的内容。一文搞懂UPS本文主要内容:UPS种类、功能
2021-09-15 07:49:53
参考一文搞懂开关电源波纹的产生、测量及抑制开关电源纹波的产生上图是开关电源中最简单的拓扑结构-buck降压型电源。随着SWITCH的开关,电感L中的电流也是在输出电流的有效值上下波动的。所以在输出端
2021-12-30 08:31:11
指针是一个特殊的变量,它里面存储的数值被解释为内存里面的一个地址想要彻底搞懂它,就必须从计算机的底层进行解释,这是你的内存条,内存在物理上是由一组DRAM芯片组成,程序在运行时。数据便被保存
2022-07-22 14:48:04
摘要故障诊断是保证水轮发电机组安全运行的重要环节。轴心轨迹辨识是HGU故障诊断的一种有效方法。提出了一种基于综合几何特征和概率神经网络(CGC-PNN)的HGU轴轨识别方法。该方法从结构、区域和边界
2021-09-15 08:18:35
嵌入式Linux开发系统开发之《一节课搞懂文件IO与标准IO》
2021-12-16 08:18:24
神经元 第3章 EBP网络(反向传播算法) 3.1 含隐层的前馈网络的学习规则 3.2 Sigmoid激发函数下的BP算法 3.3 BP网络的训练与测试 3.4 BP算法的改进 3.5 多层
2012-03-20 11:32:43
将神经网络移植到STM32最近在做的一个项目需要用到网络进行拟合,并且将拟合得到的结果用作控制,就在想能不能直接在单片机上做神经网络计算,这样就可以实时计算,不依赖于上位机。所以要解决的主要是两个
2022-01-11 06:20:53
《Fundamentals of Computer Graphics》翻译(三):隐式2D直线
2019-09-03 12:19:29
您好,我现在正在使用PIC16F18313,在代码中,我声明了一个变量,它位于我放入的示例代码中,问题是,我收到一个警告:隐式签名到无符号转换,我不知道是什么原因或者如何修复它。关于我的问题:希望你能得到一个很好的回答。谢谢。
2020-04-07 14:06:10
您好,我很少关注隐式签名到无符号转换警告。为什么所有的变量都被声明为无符号,我仍然得到这个警告?上面例子中的值是否被视为无符号或有符号字符?在这种情况下,变量“C”的值是150还是其他?同样,在下一
2018-11-06 14:43:52
预设一些特征来定位,比较典型的例子是Amazon的Kiva。 Amazon的Kiva 【 ■SLAM(同步定位与地图构建)算法在AGV小车中的使用 目前,AGV厂家运用的最先进的导航方式
2018-11-09 15:59:01
一文看懂BP神经网络的基础数学知识
2020-06-16 07:14:35
FPGA加速的关键因素是什么?EdgeBoard中神经网络算子在FPGA中的实现方法是什么?
2021-09-28 06:37:44
Intelligent Vehicles Applications1. 介绍2. HOOFR-SLAM2.1 系统框架2.2 HOOFR特征提取2.3 映射线程2.3.1 特征匹配1. 介绍提出一种HOOFR-...
2021-12-21 06:35:49
(以下内容来自开发者分享,不代表 OpenHarmony 项目群工作委员会观点)徐浩隐式查询是 OpenAtom OpenHarmony(以下简称“OpenHarmony”)的一个基础能力,被
2022-03-22 18:35:18
STM32中文显示有什么抗锯齿方法
2023-10-15 11:49:31
您好,我使用了两个选项来改变浮点到余弦角的整数。但是我得到了如下警告:警告[356 ]代码\ADC.C;282.27将浮点到整数的隐式转换。所以不能得到准确的结果。我的代码
2019-09-06 12:07:02
习神经神经网络,对于神经网络的实现是如何一直没有具体实现一下:现看到一个简单的神经网络模型用于训练的输入数据:对应的输出数据:我们这里设置:1:节点个数设置:输入层、隐层、输出层的节点
2021-08-18 07:25:21
mysql 隐式转换问题
2019-08-13 06:07:31
`BP神经网络首先给出只包含一个隐层的BP神经网络模型(两层神经网络): BP神经网络其实由两部分组成:前馈神经网络:神经网络是前馈的,其权重都不回送到输入单元,或前一层输出单元(数据信息是单向
2019-07-21 04:00:00
:warning:(361)函数声明为隐式int.,这似乎对代码的实际编译或运行没有任何影响,但是它有点烦人。有什么想法,为什么这个特定的功能是扔这个警告?
2019-10-24 13:23:19
人工神经网络(Artificial Neural Network,ANN)是一种类似生物神经网络的信息处理结构,它的提出是为了解决一些非线性,非平稳,复杂的实际问题。那有哪些办法能实现人工神经网络呢?
2019-08-01 08:06:21
优化神经网络训练方法有哪些?
2022-09-06 09:52:36
隐裂、热斑、PID效应,是影响晶硅性能的三个重要因素。今天兔子君带大家了解一下电池片隐裂的原因、如何识别及预防方法。1. 什么是“隐裂”隐裂是晶体硅组件的一种较为常见的缺陷,通俗的讲,就是一些肉眼
2018-10-15 19:58:03
inference在设备端上做。嵌入式设备的特点是算力不强、memory小。可以通过对神经网络做量化来降load和省memory,但有时可能memory还吃紧,就需要对神经网络在memory使用上做进一步优化
2021-12-23 06:16:40
的突破。AlexNet 在百万 量级的 ImageNet数据集上对于图像分类的精度大幅 度超过传统方法,一举摘下了视觉领域竞赛 ILSVRC2012的桂冠。自 AlexNet之后,研究者从卷积神经网 络
2022-08-02 10:39:39
和神经网络包。AIoT那么火,为何大家却止步于科普文?因为现成的机器学习框架都太复杂太难用。NNoM从一开始就被设计成提供给嵌入式大佬们的一个简单易用的神经网络框架。你不需要会TensorFlow
2019-05-01 19:03:01
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
摘 要:本文给出了采用ADXL335加速度传感器来采集五个手指和手背的加速度三轴信息,并通过ZigBee无线网络传输来提取手势特征量,同时利用BP神经网络算法进行误差分析来实现手势识别的设计方法
2018-11-13 16:04:45
FPGA实现神经网络关键问题分析基于FPGA的ANN实现方法基于FPGA的神经网络的性能评估及局限性
2021-04-30 06:58:13
基于深度神经网络的激光雷达物体识别系统及其嵌入式平台部署
2021-01-04 06:26:23
基于视觉的slam自动驾驶,这是我们测试的视频《基于slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、自动控制
2021-08-09 09:37:34
嵌入式系统开发与应用——基于视觉的机器人SLAM入门实践1一、OpenCV的安装与配置1. 下载OpenCV3.4.1并解压到ubuntu相应目录上2. 下载安装依赖库和编译工具cmake(1)更新
2021-12-16 08:16:12
的贝叶斯分类器得到了广泛的认可。 径向基函数(RBF)网络是一种性能良好的前馈型三层神经网络,具有全局逼近性质和最佳逼近性能,训练方法快速易行,RBF 函数还具有局部响应的生物合理性。RBF神经
2009-10-23 10:03:57
人工智能下面有哪些机器学习分支?如何用卷积神经网络(CNN)方法去解决机器学习监督学习下面的分类问题?
2021-06-16 08:09:03
作者:李云红0 引言自20世纪70年代以来,模拟电路故障诊断领域已经取得了一定的研究成果,近年来,基于神经网络技术的现代模拟电路软故障诊断方法已成为新的研究热点,神经网络的泛化能力和非线性映射能力
2019-07-05 08:06:02
人工神经网络在AI中具有举足轻重的地位,除了找到最好的神经网络模型和训练数据集之外,人工神经网络的另一个挑战是如何在嵌入式设备上实现它,同时优化性能和功率效率。 使用云计算并不总是一个选项,尤其是当
2021-11-09 08:06:27
大家好,我想学习SLAM技术有资深的老师愿意教我吗?qq:496397940
2018-11-09 13:42:27
下面来探讨一下深度学习在嵌入式设备上的应用,具体如下:1、深度学习的概念源于人工神经网络的研究,包含多个隐层的多层感知器(MLP) 是一种原始的深度学习结构。深度学习通过组合低层特征形成更加抽象
2021-10-27 08:02:31
最近对于这些经常出现在论文里面的永磁同步电机型别经常搞混,特别是面装式内置式和凸极性隐极性的对应关系,经常是混淆的,在这里专门区分一下。1、按永磁体在铁芯上的安装位置不同,可以将永磁同步电机分为,表
2021-08-27 08:09:59
小女子做基于labview的蒸发过程中液位的控制,想使用神经网络pid控制,请问这个控制方法可以吗?有谁会神经网络pid控制么。。。叩谢
2016-09-23 13:43:16
什么是回环检测?在讲解回环检测前,我们先来了解下回环的概念。在视觉SLAM问题中,位姿的估计往往是一个递推的过程,即由上一帧位姿解算当前帧位姿,因此其中的误差便这样一帧一帧的传递下去,也就是我们
2018-10-23 17:47:22
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
机器人定位导航中,目前主要涉及到激光SLAM与视觉SLAM,激光SLAM在理论、技术和产品落地上都较为成熟,因而成为现下最为主流的定位导航方式,在家用扫地机器人及商用送餐机器人等服务机器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?视觉VSLAM又是什么?激光SLAM和视觉VSLAM有哪些不同之处?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
常见的问题,但也不必过度担心。 3. 识别“隐裂”的方法 EL(Electroluminescence,电致发光)是一种太阳能电池或组件的内部缺陷检测设备,是简单有效的检测隐裂的方法。利用晶体硅
2020-12-09 15:33:38
硬件难学?首先搞懂单片机、ARM、MUC、DSP、FPGA、嵌入式错综复杂的关系!
2017-10-14 20:05:14
【总结】视觉SLAM笔记整理
2020-07-17 14:05:20
图引擎,让机器人在复杂、大面积的场景下也能轻松应对,稳定发挥,完成定位导航任务。 传统SLAM 及SLAM 3.0的建图对比: -建图精度高,图优化式建图 - 主动闭环修正 - 建图稳定、不
2019-01-21 10:57:46
)Makefile的工作原理Makefile自动检测更新Makefile隐式规则Makefile隐式规则 - 简化2Makefile隐式声明 - 简化3Makefile的变量替换Makefile优化
2021-12-15 08:58:21
专门针对Arm嵌入式设备优化的神经网络推理引擎Tengine + HCL,不同人群的量身定制
2021-01-15 08:00:42
纳米技术制作,芯片面积只有4.36平方毫米。“前两个因素使 Hiddenite 芯片与现有的 DNN 推理加速器区别开来,”motoura 教授说。“此外,我们还引入了一种新的隐式神经网络训练方法,称为
2022-03-17 19:15:13
实现单目视觉同时定位与建图(SLAM)仿真系统,描述其设计过程。该系统工作性能良好,其SLAM算法可扩展性强,可以精确逼近真实单目视觉SLAM过程。以方便SLAM算法的研究为目标,提
2009-04-15 08:50:37 82
82 基于模糊聚类的神经元识别方法_张晶
2017-01-08 11:13:290 基于模糊聚类方法的神经元形态分类识别_刘辉舟
2017-03-16 10:31:520 基于神经网络的聚类方法研究_胡伟
2017-03-16 09:37:530 、帧间配准、位姿变换估计以及闭环检测对SLAM系统的影响,建立了关键帧闭环匹配算法和SLAM实时性与鲁棒性之间的关系,提出了一种基于ORB关键帧匹配算法的SLAM方法。运用改进ORB算法加快了图像特征点提取与描述符建立速度;结合相机模型与深度信息,
2018-03-26 10:57:326 高仙的SLAM2.0技术体系核心,是基于多传感器融合+深度学习的架构,即语义SLAM。高仙SLAM2.0技术方案以语义分析、机器学习为基础,结合云端实时信息处理以及专为多传感器融合而开发的专业算法体系,真正实现了SLAM在建图和导航两个环节的完整应用。
2018-05-15 16:48:308535 本文是调研视觉SLAM中的实现方法的总结,包括三方面内容:姿态计算、闭环检测、BA优化。
2019-05-18 11:49:014037 运动恢复结构(SfM)和 SLAM 所解决的问题非常相似,但 SfM 传统上是以离线形式进行的,而 SLAM 则已经慢慢走向了低功耗/实时/单 RGB 相机的运行模式。
2019-11-22 14:34:0716984 
如今科技发展日新月异,诸如机器人、AR/VR等前沿科技产品已走入了大众生活当中。但是想在这些领域让用户有更好的体验,就需要很多底层技术的支持,SLAM就是其中之一。如果说机器人离开了SLAM
2020-04-17 09:21:4153848 本文研究了基于多传感器组合导航方法的SLAM,由于移动机器人无法通过单个传感器得到可靠的信息,采用多传感器组合导航的方法可以很好的解决这个问题。本文用单个CCD摄像头和里程计组合进行SLAM研究
2020-08-07 17:14:0112 在业内,视觉SLAM与激光SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同的人也有不同的看法及见解,以下将从成本、应用场景、地图精度、易用性几个方面来进行详细阐述。
2020-08-28 14:53:3016068 
同时定位与地图构建(SLAM)作为机器人领域的硏究热点,近年来取得了快速发展,但多数SLAM方法未考虑应用场景中的动态或可移动目标。针对该问题,提出一种适用于动态场景的SLAM方法。将基于深度学习
2021-03-18 10:39:3916 针对基于RBPF的激光SLAM算法在重采样过程中出现的样本贫化和激光测量模型不准确的问题,提出种优化的激光SLAM算法。为缓解重采样过程中的样本贫化问题,采用最小采样方差重采样方法改进原重采样方法
2021-04-01 10:48:316 课题组已将该研究成果应用于智能驾驶即时定位与建图(SLAM)任务中,提出了基于三维激光数据的层级式SLAM方法,实现了无GNSS环境下智能无人系统的高精度自主定位定姿,在智能驾驶国际著名公开数据集KITTI上排名全球第7(纯激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
高效共享与利用的难题,面向快速、准确、大范围多机协同SLAM需求,本文提出了一种基于集中式架构的多无人机局部地图数据高效共享和融合的SLAM方法Data Sharing Oriented Multi-uav Collaborative SLAM( DSM-SLAM)。该方法创新性地提出了:(1)基于
2021-06-02 11:29:378 我看来,vslam得发展也就是从MonoSLAM->PTAM->图优化SLAM->ORB-SLAM为代表的现代slam,其中可能还有许多内容,不过这些开源SLAM一定程度上体现了SLAM发展过程了....
2021-06-18 10:40:521357 
./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 近年来,使用机器学习技术进行特征提取的基于调制解调器特征的SLAM越来越受到关注,并有望在几乎所有机器人工作环境中超越传统方法。
2022-10-17 16:39:46603 (Visual SLAM,VSLAM)是将图像作为主要环境感知信息源的SLAM系统,VSLAM以计算相机位姿为主要目标,通过多视几何方法构建3D地图[4]
2022-12-02 15:00:281149 手持SLAM设备最大的特点肯定要放到手持这个动作上面,由于SLAM算法的优越性,手持可以做到走到哪里测到哪里。
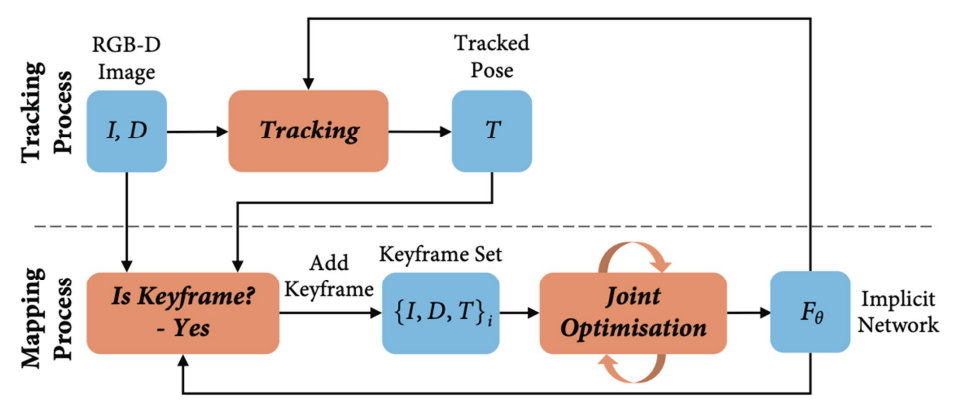
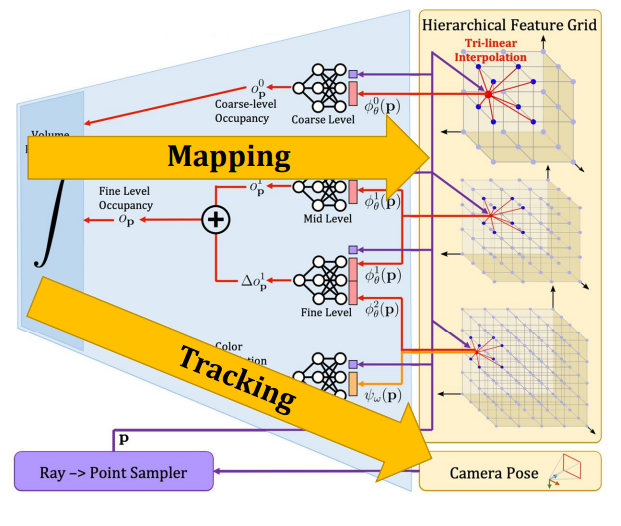
2022-12-27 10:43:413287 我们提出了NICE-SLAM,一个密集的RGB-D SLAM系统,它具有实时性、可扩展性、预测性和对各种挑战性场景的鲁棒性。
2023-01-30 11:19:29451 我们提出了一个新的几何和光度3D映射管道,用于从单眼图像中准确和实时地重建场景。为了实现这一目标,我们利用了最近在密集单眼SLAM和实时分层容积神经辐射场方面的进展。
2023-01-30 11:24:13491 我们提出了一种利用深度密集单目 SLAM 和快速不确定性传播从图像重建 3D 场景的新方法。所提出的方法能够密集、准确、实时地 3D 重建场景,同时对来自密集单目 SLAM 的极其嘈杂的深度估计具有鲁棒性。
2023-01-30 11:34:22449 vMAP 是一种基于神经场的对象级密集 SLAM 系统,可根据 RGB-D 输入流实时自动构建对象级场景模型。
2023-06-15 09:29:13498 
近日,全国SLAM技术论坛于厦门大学举办。本次论坛聚焦SLAM和相关技术的前沿发展以及在应用领域的行业机会,旨在为SLAM技术和应用领域搭建全方位展示与交流平台,推动国内SLAM技术的发展以及产学研
2023-08-01 09:37:23526 近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来详细聊聊视觉SLAM的那些事儿。
2023-09-05 09:31:111389 
提出了一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统,该系统由完整的前端和后端模块组成,包括里程计、回环检测、子图融合和全局优化。
2023-11-29 10:35:18189 
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论