高通、英特尔、英伟达、全志、联芯、华为海思、三星都在积极推无人机方案,英特尔更热衷于为无人机提供解决方案,尤其是表现在无人机视觉方面。相较起高通的双目视觉技术,规避了计算机视觉识别物体的大量计算,并有效提高了精度。
2016-09-09 09:40:05 2004
2004 相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。
2016-11-05 03:46:283097 未来十年,为了完成从感知+预警到决策+执行的进化之路,高级辅助驾驶系统(ADAS)将接入更多的传感器,实现更为复杂的计算,同时具备更高的安全性。
2016-11-11 10:18:284743 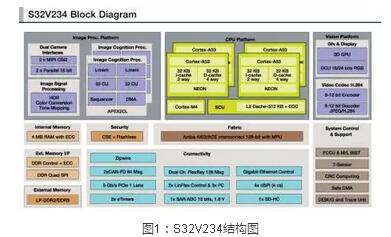
据麦姆斯咨询报道,物联网及双目视觉专家钜芯发布了一款智能双目立体视觉系统,以及业内首颗智能双目立体视觉芯片eagleye100。
2017-10-26 10:26:219961 本文提出了一种用于具有双目视觉的自主机器人的三维语义场景感知的端到端流程。该流程包括实例分割、特征匹配和点集配准。首先,利用RGB图像进行单视图三维语义场景分割,将2D数据集中的常见对象类封装为物体实例的点云。
2024-02-21 15:55:38148 
`双目立体视觉原理大揭秘(一)——双目视觉导航、定位;双目立体视觉是一门有着广阔应用前景的学科,根据双目立体视觉CCAS提供的思路及组成原理,随着光学、电子学以及计算机技术的发展,将不断进步,逐渐
2013-11-21 16:20:51
将成为工业检测、生物医学、虚拟现实等领域的关键技术,还有可能应用于航天遥测、军事侦察等领域。目前在国外,双目体视技术已广泛应用于生产、生 活中。双目立体视觉是计算机视觉的一个重要分支,单从双目视觉
2013-11-21 16:22:03
四种:1、双目视觉导航、定位;2、三维重构;3、双目立体测量;4、空间三维立体跟踪。这些运用需求,其实很多项目上都有用到,如工业流水线上物体外形检测、表面缺陷等,如娱乐活动中可以利用立体视觉构造
2016-03-03 09:36:59
GHz 雷达系统参考设计五、世强高级汽车环视辅助驾驶系统(ADAS)方案……双目视觉ADAS解决方案通过文档,可了解以下内容:一、双目视觉 ADAS 芯片-S32V234二、双目视觉 ADAS 的优势三、双目视觉的测距步骤四、双目视觉 ADAS 的应用五、双目视觉 ADSA 的解决方案六、总结
2020-06-02 15:09:59
` 本帖最后由 sszx2007 于 2020-3-2 17:04 编辑
LabVIEW双目视觉原创 张冬斌 LabVIEW逆向工程高级编程 转载至:https
2020-03-02 17:03:12
挑战,包括激光雷达、单目测距和双目视觉技术等。在当前的高级辅助驾驶技术(ADAS)中,双目视觉技术在距离检测方面表现出色,它可以精确地测量物体的距离,提供更客观的数据。
为了应对这一需求,设计了一种
2023-12-19 18:02:07
大佬们好我有一定的Labview基础,然而对Labview的双目视觉测量所知甚少,现在有一个需求,就是在比较小的空间内实现微米级的三维动态测量,想知道通过Labview双目视觉有实现的可能性吗?希望大佬们多多指导。感激不尽!谢谢!
2020-07-21 21:50:21
和双目视觉硬件等设计的试用。相信板子的厂家也非常乐于看到这个配套的硬件产生。3.整个项目涉及:双目景深算法的开发,里面有包含了双目摄像头的畸变校准,极坐标的特征匹配,景深图像的去噪声,生产景深图像;硬件
2017-08-21 12:42:45
申请理由:之前用wrtnode的u***接双摄像头外加一个么mcu实现过一个一个双目视觉随动平台,这样太麻烦了,希望能用这个来实现一个更简单的解决方案。项目描述:u***接双摄像头,mcu控制云台。通过WIFI将双目视觉传递到手机进行显示,同时将手机的角度信息返回,控制云台转动。
2015-09-10 11:25:10
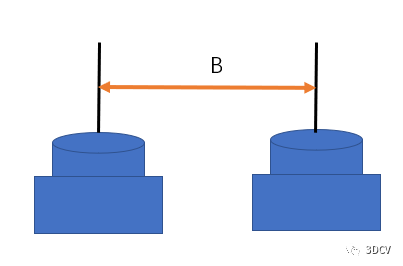
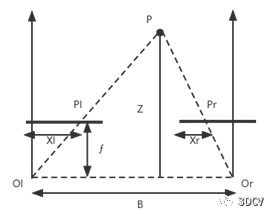
双目视觉的原理:由于视差原理,左右两个ccd的位置固定,若能测量空间中同一个点P在左右两个ccd中图像的位置,则根据三角原理,可以求得P点在空间中的坐标位置。可用于摄像头实现空间点的距离测量。下图
2021-09-27 16:52:18
。机器人由电力驱动,通过液压组件控制行动。机器人的体内和腿上安装了可以使其保持平衡的传感器,并在头部安装了光学雷达和双目视觉传感器,可以帮助机器人躲避障碍、判断地貌、进行导航。该版本Atlas高约
2016-02-25 10:16:20
我自己了解ARM不是很多,想问一下大家,最近想做一个基于双目视觉的避障自主导航无人车,我想在ARM上面搭载GPS模块,实现无人车自动导航功能,另一方面我还想利用车载PC的OpenCV在处理完双目
2017-03-18 13:19:01
双目视觉智能平台概述硬件资源1 FMC 双目MIPI模块FL0214FL0214模块的参数说明 FL0214模块的结构图FL0214模块原理框图模块FMC LPC的引脚分配
2021-01-01 06:18:17
`相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。恩智浦视觉ADAS专用SoC: S32V234未来十年
2017-08-12 15:15:52
利用LABVIEW视觉模块完成摄像机标定,一般需要哪些vi?相关参数怎么设置?
2015-05-17 17:24:58
和空间位置的精度要求往往比较高。计算机视觉是利用从不同的观察点获取的图像来重建三维[1]场景描述的技术。同时被动视觉的大部分研究都集中于双目视觉,即两个摄像机从两个不同的观察点获得同一场景的两幅图全文下载
2010-04-24 09:25:13
(Odometry)视觉里程计(Visual Odometry)单目视觉里程计(monocular Visual Odometry)双目视觉里程计(stereo Visual Odometry)视觉惯性里程计(visual-inertial Odometry)轮式里程计odometry 编码器 编码轮encoder多传...
2021-07-27 07:21:50
文件BOOT.bin.pdf》制作包含.bit文件的BOOT.bin文件,将其拷贝到TF卡中,插入Zstar开发板的卡槽中,做好装配连接,上电。视频显示如图所示。图 双目视频采集效果`
2019-12-10 15:29:46
双目注视下双臂机器人装配时,双目测量分辨率最高的位置往往并不对应机器人 的最佳操作性,为求得机器人的最佳装配位置本文把问题归结为对一个所构造的目标函数求值,并通
2009-07-08 14:10:42 21
21 根据双目视觉传感器的工作原理, 分析了影响测量精度的因素, 表明双目视觉传感器的物体空间坐标与图像坐标之间存在复杂的非线性映射关系, 其数学模型无法用解析式精确地加以
2009-07-10 15:53:1111 对于基于图像的具有手眼或固定摄像机模式的双目视觉伺服控制系统,考虑机器人的运动学特性,在摄像机的内外参数部分未知的情况下,给出了一种直接自适应控制器实现定位
2010-01-11 15:57:3118 本文主要从控制角度出发,针对手眼机器人双目视觉伺服控制问题,利用变结构控制理论设计了视觉伺服控制器,同时用自适应估计的方法对深度进行估计,基于图像误差实现了定
2010-01-13 14:43:2719 文章介绍了一种以TMS320DM642 为核心,结合编解码芯片SAA7115 和SAA7105 组成的高速图像处理系统,和典型的电机控制芯片TMS320F2812 为核心的电机控制系统,组成了基于双目视觉的跟踪机
2010-01-18 15:28:3828 提出一种新的三维坐标测量方法,该方法基于双目视觉、双频光栅投影、相移和三角测量等测量方法。测量系统采用两个摄像机记录投影光栅,通过分析双频投影条纹不同栅距的
2010-01-22 12:10:3820 双日视觉是计算机视觉领域的一个重要组成部分。双目视觉研究中的关键技术摄像机标定和立体匹配一直是研究的热点。本文由两部分组成,分别对双目视觉的算法和未标定图
2010-08-14 16:41:540 一种基于图像分割和立体视觉相结合的障碍物检测方法。通过分割提取出了障碍物的大致形体并滤去地面上的冗余信息,这样就把立体视觉避障中匹配区域缩小到有用的障碍物区
2010-10-18 16:08:0827 视觉传感器的标定技术
双目视觉传感器由两台性能相同的面阵CCD摄像机组成,基于立体视差的原理,可完
2009-11-07 11:42:011723 本内容基于ADSP-BF548处理器设计实现了具有结构光双目视觉的四足可变形仿生机器人系统
2011-08-31 17:42:15144 根据双目立体视觉传感器三角立体视差模型,建立了结构参数误差的传递函数,分析了双目视觉传感器结构参数及其误差传递规律对传感器综合测量精度的影响,得出了结构参数的合理
2011-09-06 14:38:4075 本文以遗视投影变换为依据,针对多视觉传感器检测系统中的双目视觉传感器,建立了双目视觉传感器测量空间三维坐标的模型.事先确定摄像机的部分不易变化的参数,其它参数在摄
2012-03-02 16:02:1315 双目视觉是利用机器视觉进行障碍物检测的研究热点。针对双目视频不同步,导致立体匹配不精准的问题,提出了一种基于图像处理的双目校准算法。算法首先根据道路的先验特征模型,建立视觉校准的敏感区域,以减小
2015-12-18 16:26:5734 电子开发机器人相关教程资料——全自主机器人双目视觉运动检测
2016-09-06 16:42:430 全自主机器人垂直异构双目视觉研究,感兴趣的小伙伴们可以瞧一瞧。
2016-09-18 17:15:050 APEX2CL 的视觉加速引擎。每个 APEX2CL 拥有 64 个
本地计算单元(CU),并配有本地内存和专用 DMA,通过 SIMD/MIMD(单指令多数据/多指令多
2016-12-30 14:55:3725 基于双目视觉伺服反馈的非完整移动机器人轨迹跟踪_王宝磊
2017-03-16 09:17:261 问题,、提出一种基于双目视觉的投影仪标定算法,将投影仪视为逆向相机,利用一个辅助相机捕获投影于不同位置标定平面,确立摄像机图像与标定平面之间的对应关系,然后利用极线原理得到摄像机图像与投影仪图像之间的对应关
2017-11-06 15:30:2120 针对国内现有电子导盲系统存在扫面范围小的缺点,提出一种新型导盲设计方法。该系统以双目视觉测距技术为基础,通过语音转换模块能够准确地提示前方障碍物情况。本文对该设计的测距基本原理及关键技术作了一定阐述,并给出了可行的软、硬件设计方法。
2017-11-22 15:25:002133 
双目立体测量的特点类似于“双目导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中测量多个产品;第三、对光照环境要求高。因为测量的时候相机和被测物必然有相对位移,所以拍摄到的图像可能各个角度都会有。
2018-01-23 11:32:5322024 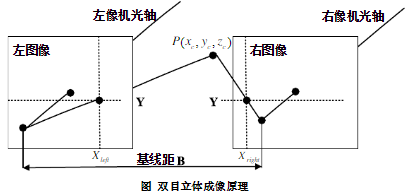
双目视觉导航敏感器BVS逐渐成为各国航天最新领域的研制热点。双目立体视觉是由不同位置的两台或者一台摄像机经过移动或旋转拍摄同一幅场景,通过各种算法匹配出相应像点,从而计算出视差,然后基于三角测量
2018-01-25 14:00:160 双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度
2018-02-08 14:46:2449072 Binocular Recognition双目识别:基于利用仿生学模拟人眼视觉,双目视觉基于视差原理对图像进行重构,利用bdc人脸识别算法进行识别。实践证明通过融合双目视觉(Binocular vision)实现是获取更好的立体信息,从而在识别时更具高效。
2018-03-19 08:48:449988 目前市面上的深度视觉产品主要是深度摄像头。按技术分类,深度摄像头可分为以下三类主流技术:结构光、双目视觉和TOF飞行时间法。前两者受环境影响较大,后者成本高量产难还不够清晰。
2018-04-10 09:56:156457 红外或激光测距是目前应用最为广泛的无人机探测技术,但是由于它是通过信号来计算的,因此很容易受到外界因素的干扰,用于自动避障的功能并不是很合适。而双目视觉技术则不会受到太大的外界干扰,因此虽然该技术的难度较高,但是已经开始逐渐被应用到无人机避障技术中来。
2018-05-29 09:01:004685 视觉的优势在于它更致密,而不是精度更高,测的更远,视觉是聚焦在中近距离,雷达是聚焦在中远距离。
2018-08-06 11:28:1315217 现在,AI越来越融入我们的生活之中,而AI时代下,移动感知已经渐渐成为了整个行业的共性。不论是无人设备还是机器人,它们都需要进行移动,因此,移动感知已经成为了新的需求。
2018-09-20 14:44:023829 在得到初始视差图后,需要进一步判别障碍物的远近及大小,所以这里引入 V-视差和 U-视差理论 [7] 。 V-视差图是在初始视差图的基础上,累加视差图像每一行上具有相同视差值 dv 的像素个数,以像素的个数作为像素坐标(dv,y)的灰度值,为 0 到 255。 V-视差图的高度与原图像是相同的,但是宽度只有 256 [8] 。 同理,U-视差图是累加视差图像每一列上具有相同视差值 du 的像素个数,高度为 256。
2018-11-29 16:27:4811512 
基于内窥镜视觉导航的盆腔微创手术,往往因为病灶的复杂解剖位置以及内窥镜视野的局限性,对手术的顺利开展提出了重要的挑战。针对这个问题,设计并开发一套基于立体视觉的盆腔微创手术的增强现实( AR)导航仿真系统。
2018-12-29 16:50:406 的逐步成熟,人机协作的不断深入发展,机器人产品应用不断扩展,全球机器人将迎来新一轮的增长。 自创立之初,INDEMIND便一直致力于计算机视觉技术的研发与应用创新,旗下自研的双目视觉惯性模组及高精度Vi-SLAM算法已应用于扫地机器人、服务机器人、穿戴计
2020-03-21 15:33:541033 自动驾驶、动作捕捉等场景非常依赖双目立体相机采集图像、位姿信息的清晰度、丰富度,单位时间内双目相机提供的信息越多,越有利于相关场景的算法追踪及定位,降低算法开发难度。
2019-04-11 18:21:132941 视觉技术升级进步。丨深耕不辍,实现业内首款200帧双目惯性相机面对日益提升的使用需求,为提升产品适用性,INDEMIND深耕不辍,为旗下双目视觉惯性模组提供了200帧高速环境获取能力,满足了不同场景
2019-04-28 18:33:111894 传统的测量设备如三坐标测量机、卡尺、千分尺等, 因测量速度慢、效率低,已不能适应现代制造技术发展的需要。
2019-05-29 13:49:1813039 
解算应用在单目传感器上无法得到有力支持,影响搭载单目视觉导航系统扫地机的智能避障,语义地图等功能。另一方面,单目SLAM更易受到运动过程中的噪声影响,稳定性较双目SLAM低,对复杂环境的适应能力较弱
2019-07-15 19:00:301754 随着社会经济发展水平和人们消费观念的转变,更具科技属性的智能规划型扫地机器人成为最受费者青睐的智能家居产品。据数据显示,智能规划扫地机器人市场占比从17年的10%提升到18年的59%,其中激光导航占76%,视觉导航系统占24%。
2019-07-05 09:51:395607 在双目相机领域是非常煎熬和纠结的,煎熬来自哪里呢?
2019-07-11 16:39:195748 激光技术虽然也能实现类似双目视觉的功能,但是受限于技术发展,目前的激光元件普遍价格贵、体积大、功耗高,应用在消费级无人机上既不经济也不实用。
2019-08-01 09:59:371809 另外,如果拍摄的物体缺乏纹理和细节(比如拍摄一张白纸)的话,也很难进行特征匹配。这些都对算法的鲁棒性提出了很大的挑战。
2019-08-23 15:17:437449 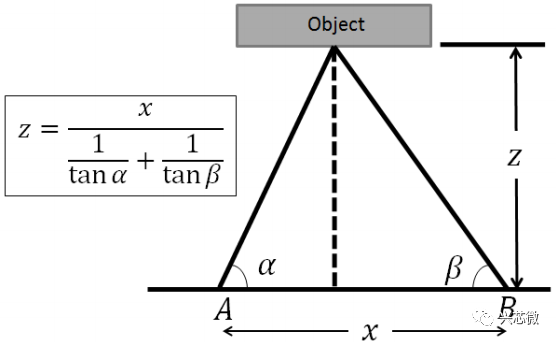
提出了一种移动机器人路径规划和避障的系统设计方案,实现了移动机器人自主行进的路径规划和自动避障功能.详细说明了如何采用立体视觉实现对环境的探测,利用图像处理算法的组合分离出地面、背景、障碍物和目标
2019-08-29 17:03:003 由于双目视觉监控系统可以模仿人眼功能,感知三维世界信息,能够得到被测对象到CCD摄像机的深度信息,近几年已开始在需要三维立体检测的领域得到应用。另外,双目视觉监控系统也可用于多场景监控,大大扩展
2020-05-07 09:55:59966 如今,经济水平不断发展,人们的生活水平也不断提升,越来越多的消费者开始注重生活品质。自带新奇、懒人助手等标签的扫地机器人一进入大众视野,便被广大消费者所接受,俨然已经成为一类新兴小家电。 但随着扫地机器人技术不断升级,导航技术不断成熟,行业进入同质化时代,产品之间的差异化越来越小。要在竞争中破局,就需要源源不断的新技术加持,打造出更有差异化的产品,直击用户痛点,才会吸引消费者。 目前,市面上主流的扫地
2020-11-12 14:24:053594 如今,人们的生活水平越来越高,越来越多的消费者开始注重生活品质,很多的家庭为了省时省力都会购入一台智能扫地机器人。但是当很多消费者购买了扫地机回家使用后发现,咦,怎么那么蠢,说好的智能呢???这个智障扫地机器人! 花钱来买扫地机,本打算提升自己的生活品质,自己好偷一偷懒的。没想到它却成了生活扼住自己喉咙加以拳打脚踢的帮凶,只好暗叹自己究竟造了什么孽,买了这么个智障(鱼哭了水知道,你哭了谁知道)。 其实
2020-11-12 14:26:041023 Airdoc莫纳什研究中心在近期举办的KITTI Vision Benchmark中双目立体匹配竞赛中,过关斩将,获得双目视觉匹配世界冠军。获奖算法第一作者程雪莲,师从Airdoc莫纳什研究中心首席科学家戈宗元博士。
2020-08-19 16:50:20861 1.1. 双目视觉简介 双目视觉广泛应用在机器人导航,精密工业测量、物体识别、虚拟现实、场景重建,勘测领域。 什么是双目视觉? 双目视觉是模拟人类视觉原理,使用计算机被动感知距离的方法。从两个或者
2020-10-23 09:51:5710867 
先说一下单/双目的测距原理区别: 单目测距原理: 先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车
2020-11-05 10:07:394876 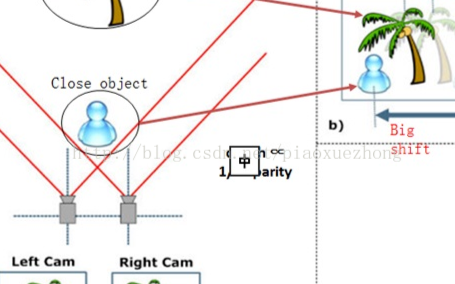
不仅要在靠近柜脚床脚时减速,还要在“看见”障碍物(掉在地上的袜子、缠绕的数据线)时来个急刹车。
2020-11-12 17:40:201859 机器人想要通过若干幅图像来获取目标的三维坐标,双目视觉技术中更为重要的工作是对图像执行匹配,首先明确物体在左右图像的相互匹配的点,然后获得每一点视差以及深度信息。
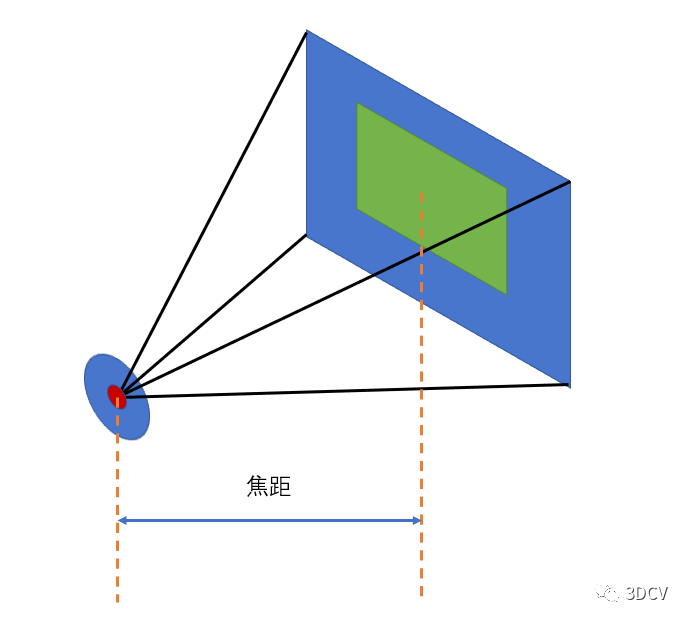
2021-03-04 09:50:211679 文章导读 本文通过介绍双目立体视觉的成像过程,带大家了解双目视觉如何从两个不同视角的成像平面中恢复出物体三维几何信息,重建周围景物的三维形状与位置。 在说双目视觉之前,我们先聊一下单目成像过程
2021-04-26 13:36:393497 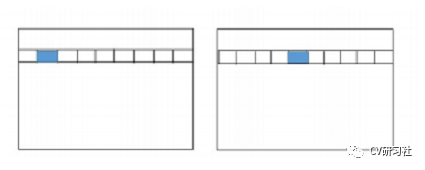
双目视觉技术的原理、结构、特点、发展现状和发展方向分析 双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。 双目立体视觉系统一般由双摄像机从不同角度同时
2021-06-01 16:36:562223 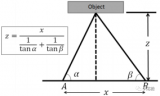
机器视觉可代替人眼对物体进行检测和识别,较为常见的是利用单目摄像头。若要获取物体的深度信息,仅凭单目摄像头是不完善的,通常情况下需选择双目摄像头来获取物体三维信息。
2022-04-07 09:42:442123 针对热轧宽厚板产线现场存在大量冷却水导致的水汽、辊道上方照明不均并存在反光、钢板表面随机分布除鳞残渣和粉尘、钢板运动过程中震动打滑等恶劣工况,基于人眼双目视觉理论提出了多阵列相机组图像采集机制,研究出高斯噪声、椒盐噪声、脉冲噪声等多类型混杂噪声高效滤除算法
2022-07-05 11:46:061361 摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
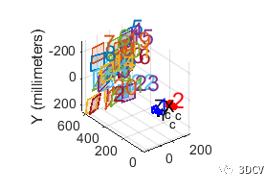
2022-08-10 11:38:122020 双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系:
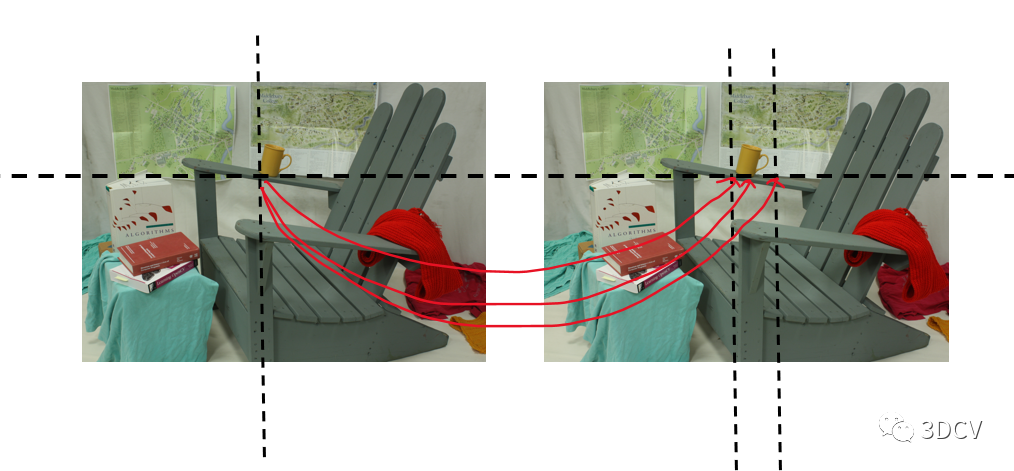
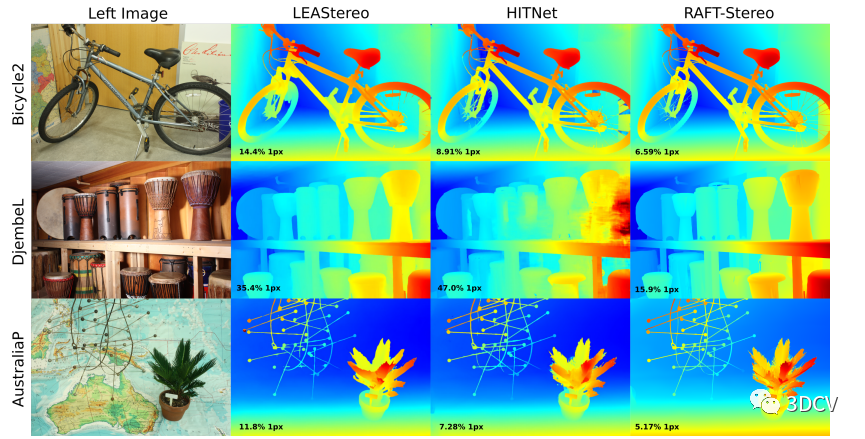
2022-10-10 17:25:311009 事实上,这些指标都在强调视差图在视差方向上的准确性,却没有怎么强调视差图与原图之间的贴合性——或者说,它们都在强调Z方向的准确性,却没有重视其在X/Y方向上的准确性。
2022-10-19 15:12:111995 审核编辑:彭静
2022-10-31 15:13:40948 审核编辑:彭静
2022-10-31 16:28:41732 先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车还是行人,是货车、SUV还是小轿车。
2022-11-24 10:49:118114 上实现双目视觉算法stereoBM的openCL版本的移植和优化,移植后的算法在GPU平台上性能提升明显。 展锐T710开发板内部集成了Imagination GM9446显示芯片,主频为800MHz
2022-11-28 10:20:05483 银牛微电子作为全球双目立体视觉的持续引领者,一直以来,专注3D视觉,以移动机器人为切入点,利用3D双目视觉技术为移动机器人导航避障提供精准的三维立体数据信息。其推出的R132模组,具备强大的3D深度
2022-12-15 10:53:131283 有了深度学习,可以根据3-D的ground truth来训练NN模型,得到3D大小和姿态估计,距离是基于平行线原理(single view metrology)得到的。
2022-12-20 15:40:40670 精准定位是所有自动驾驶系统的基础组成模块。本文,我们专注于双目相机,提出一种名叫SOFT2的新方法,这是当前KITTI评分板上排名第一的算法。
2023-01-30 11:01:011161 双目测距的原理就说到这里,为了避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头测距过程中碰到的几点疑惑展开。
2023-04-26 16:47:373409 
近些年迅猛发展的3D视觉技术已成为AGV领域的关键技术之一,进一步提升AGV智能化水平的同时,也实现了更高效、准确和安全的物流操作。在户外环境中,用于AGV托盘或货物识别最常见的两种3D视觉技术分别是主动双目视觉技术和ToF(Time-of-Flight)感知技术
2023-05-31 15:52:52888 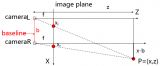
输入数据来源可以是单目视觉相机、双目视觉相机,数据可以是灰度图或者彩色图。
基于单目图片的称为单目车道线检测技术,基于双目图片的称为双目车道线检测技术。
2023-06-01 14:18:320 双目标定的方法有很多,常用的是基于棋盘格图案的张氏标定法,它利用多幅不同角度拍摄的棋盘格图像,通过提取角点坐标和求解最小二乘问题,得到两个相机的内参矩阵和外参矩阵,进而计算出基础矩阵。
2023-06-06 14:35:25659 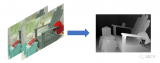
双目视觉传感器有效弥补了数据驱动的 AI 算法在泛化性能上的短板,深度学习模型与视差点云技术的结合,极大扩张了视觉传感器的工作边界。
2023-06-07 14:16:32219 
双目视觉算法stereoBM的openCL版本的移植和优化,移植后的算法在GPU平台上性能提升明显。展锐T710开发板内部集成了ImaginationGM9446显
2022-11-30 15:41:43302 
SGBM(Semi-Global Block Matching)是一种用于计算双目视觉中视差(disparity)的半全局匹配算法,在OpenCV中的实现为semi-global block matching(SGBM)。
2023-06-28 09:29:271292 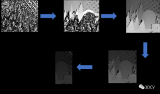
本文对ToF、双目视觉、结构光这三种技术展开分析,帮助你了解其各自的特点及应用
2023-07-10 16:04:16905 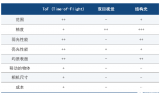
如果按照3D实现方式进行划分,TOF 则是增长最快的,年均复合增长达到了20.7%,然后是双目视觉达到了17.5%,接下来是激光三角测距、CT、结构光。虽然结构光的增长率不是最高的,但是因为其基数大,2023年接近3.7亿颗。
2023-08-16 10:34:28283 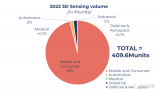
工业建模对于精度有着高要求,这意味着无人机的 SLAM 算法要提供可靠的实时位姿估计。ORB-SLAM3 是目前融合双目视觉与 IMU 的优秀算法,其前端是针对实时性优化的 ORB 描述子与关键帧
2023-09-18 10:12:49444 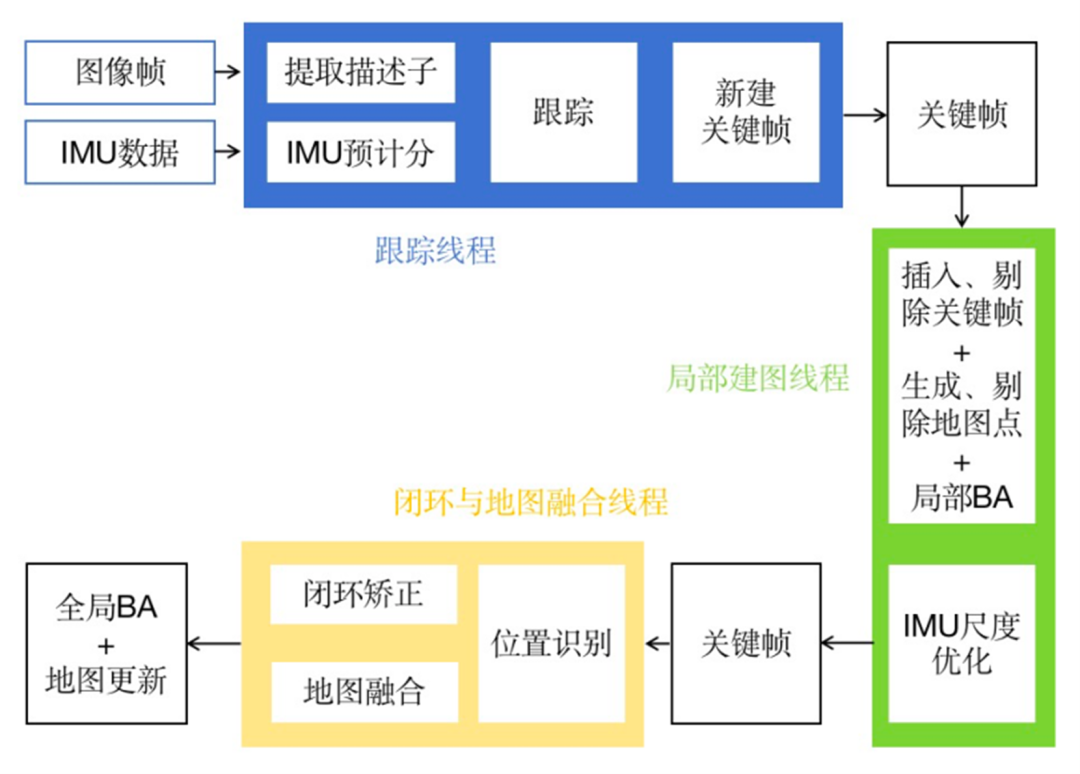
主要性能和优势
使用 Zynq-7000 SoC 对嵌入式应用进行快速原型设计以实现优化
硬件、设计工具、 IP、以及预验证参考设计
演示嵌入式设计,面向视频通道
2024-01-09 11:03:11319 
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论