一种无OS的MCU实用软件框架,包括任务轮询管理,命令管理器、低功耗管理、环形缓冲区等实用模块。系统中广泛利用自定义段技术减少各个模块间的耦合关系,大大提供程序的可维护性。
2022-08-31 10:51:38 1010
1010 铺设异常检测可以帮助减少数据存储、传输、标记和处理的压力。本论文描述了一种基于Transformer和自监督学习的新方法,有助于定位异常区域。
2023-12-06 14:57:102892 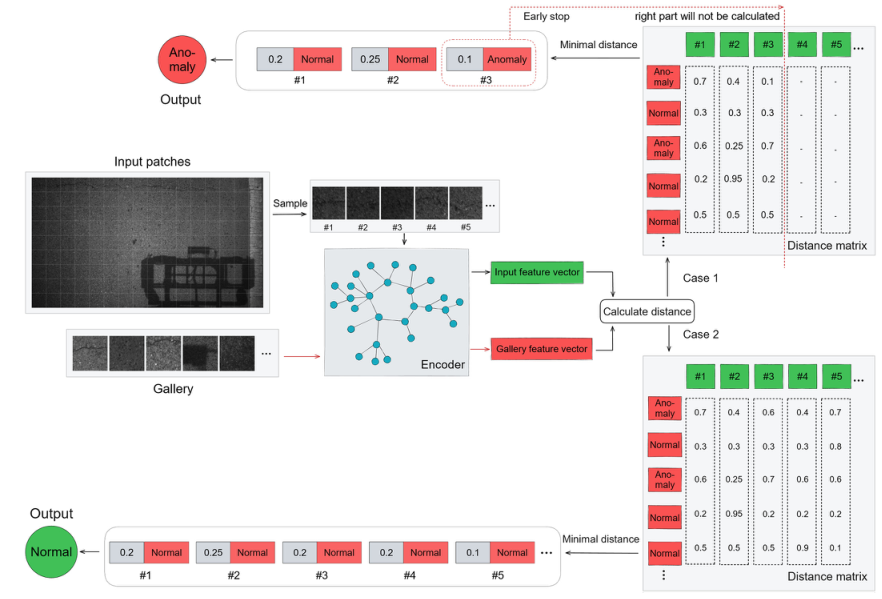
1. 介绍本文提出一种专门用于检测小目标的框架,框架结构如下图:我们探索了可以提高小目标检测能力的3个方面:Dilated模块,特征融合以及passthrough模块。Dilated Module
2022-11-04 11:14:00
和易于实现的特点使得此方法在实际的被动声定位系统中得到了广泛应用。但是此方法只能在高信噪比和适度混响条件下有较好的性能。针对此问题,给出了一种修正的PHAT-GCC方法,并在不同信噪比和混响环境下
2010-04-22 11:55:28
1、摘要近年来,在深度卷积神经网络(CNNs)的帮助下,图像和视频监控在智能交通系统(ITS)中取得了长足的进展。作为一种先进的感知方法,智能交通系统对视频监控中每一帧感兴趣的目标进行检测是其广泛
2021-08-31 07:43:19
摘要故障诊断是保证水轮发电机组安全运行的重要环节。轴心轨迹辨识是HGU故障诊断的一种有效方法。提出了一种基于综合几何特征和概率神经网络(CGC-PNN)的HGU轴轨识别方法。该方法从结构、区域和边界
2021-09-15 08:18:35
一种较通用的界面切换框架分享,绝对实用
2021-12-27 06:02:28
单路D型触发器有何功能呢?有哪些引脚?如何利用单路D型触发器去设计一种自锁开关?
2022-02-28 08:06:24
CPU优化深度学习框架和函数库机器学***器
2021-02-22 06:01:02
本文给大家介绍一种单WiFi功能双频WiFi模块。
2021-05-18 07:17:30
本文介绍了一种基于H.264标准的快速运动估计算法。
2021-06-03 06:27:37
介绍一种嵌入式框架模板的构建方案
2022-02-22 06:25:45
在RK3399开发板上如何去实现一种人工智能深度学习框架呢?
2022-03-07 07:00:05
如何利用STM32去实现一种两轮自平衡车呢?
2021-12-20 07:44:28
ThreadX内核模板框架是怎样去设计的?如何去实现一种ThreadX内核框架的设计呢?
2021-11-29 07:08:01
基于Flex框架的卷接机组监控系统是怎样构成的?怎样去设计一种基于Flex框架的卷接机组监控系统?
2021-09-24 07:36:29
分析了目前常用的波达角估计算法,研究了等距线阵和圆阵的特点,指出其存在关于横轴镜像对称信号源的空间模糊性,利用等距T型阵克服了这一困难。提出了一种新的基于训练
2008-12-16 23:57:57 10
10 提出了一种利用PN序列进行OFDM频率估计的新方法。在多径信道中,该方法由于利用了多径信号,提高了频率估计精度。仿真结果显示,其频率估计精度能满足Rayleigh信道下中低速运
2009-02-28 16:34:5823 提出一种新的Ad Hoc网络QoS保障框架。该框架能够区分不同优先级的业务和不同QoS要求的业务。能够保障在网络可用资源不足的情况下,高优先级的业务通过“抢占”的方式接入网络
2009-04-14 09:43:3820 一种适合软件无线电的GMSK时钟和载波相位联合估计算法关:摘 要: 利用最大似然估计准则, 针对G MS K提出了一种不需要前导字的前馈载波相位和时钟误差联合佑计算法, 可用于
2009-05-07 10:44:0229 运用组件复用的思想,结合XML技术,设计开发了一种基于可复用的组件库的Web测控软件框架。通过使用该软件框架中提供的丰富的组件库和灵活的插件管理机制,大大地降低了基于WE
2009-06-06 14:51:2417 信道估计作为OFDM 中的一项关键技术,直接影响着OFDM 系统的性能。而现有的最小二乘估计(LS)算法、最小均方误差估计(MMSE)算法等都存在各自的不足。因此本文提出了一种称
2009-06-18 08:29:2516 运动员姿态的计算是非常困难的并且有很多应用。在本文中,我们主要针对运动员身体倾角,提出了一种基于单目摄像机的几何计算方法。首先,利用针孔模型对场景进行3d 重建
2009-08-12 08:41:129 提出了一种基于运动特性的自适应快速运动估计算法。该算法充分利用视频图像序列的运动特征进行运动模式判定,实现了一种简单高效的搜索方法,并且根据不同的运动模式动态
2009-08-15 07:59:4218 通过研究连续时间OFDM 信号的相位特性,采用了一种新的过采样CFO 盲估计算法。这种方法利用由CFO 产生的共同相偏来获得高性能频偏估计,具有高带宽和数据利用率的特点。
2009-08-17 08:28:5515 该文对K 分布杂波模型统计特性做了深入分析和推导,提出了一种新的运用样本算数平均和几何平均的高精度低运算量的K 分布杂波模型参数估计快速算法,并对算法的估计精度作了
2009-11-25 14:48:105 为了减小NLOS 传播的影响,基于几何结构的单次反射统计信道模型,该文提出一种NLOS 环境下的TOA/AOA 定位算法。利用RBF 神经网络较快的学习特性和逼近任意非线性映射的能力,对NLOS
2009-11-25 15:46:2922 数字水印在应用中会受到很多种攻击,其中几何攻击是危害比较大的一种攻击,它直接导致水印无法被识别,从而使版权保护失效。本文提出了一种利用了离散小波变换和离散余弦
2010-01-15 15:36:3110 一种积分过程PID自整定方法:针对积分加滞后过程,提出了一种设定值加权的pid控制器参数自整定方法,并且针对该方法定义了一种鲁棒性能指标.首先引入一种内部反馈结构,利用
2010-03-18 15:58:0721 一种特殊阵列实现DOA估计的方法:提出了一种基于特殊阵列形式实现doa估计的方法,在均匀线性阵列(UniformLinearArray,ULA)上增加一个阵元,将阵元
2010-03-18 16:18:5019 汽车牌照自动识别系统中由于拍摄得到的字符模糊经常造成分割效果不佳。通常采用的灰度处理方法也丢失了很多颜色信息。本文提出一种基于模糊神经网络的算法,充分利用车
2010-07-16 18:00:5510 为了降低全搜索运动估计算法带来的巨大计算量,提高运动估计计算速度,提出了一种新型的用于全搜索运动估计硬件结构。该硬件结构能实时地通过全搜索运动估计来搜索每个像素块
2010-07-29 16:07:4516 分析已有的一些基音估计算法,对比其优缺点,提出一种可大大提高计算速度的高效基音估计算法。该算法是利用平均幅度差(MAMDF)法提取若干个可能峰值点,再利用计算精度较高
2010-12-31 17:21:070
一种单管电路
2009-07-29 12:19:48760 一种新的估计基础矩阵的高精度鲁棒算法_张永祥
2017-01-03 15:24:450 一种改进的循环谱估计算法_刘锋
2017-01-07 16:06:320 工业物联网中节点资源受限,数据融合是减少能耗最重要的技术之一。为了保障工业物联网中数据在融合过程的安全性,提出一种基于监督机制的工业物联网安全数据融合方法。首先将采集的数据映射成模式码后进行融合
2017-01-13 16:18:380 一种成分取证的理论分析模式的分类框架
2017-03-20 11:04:200 基于单目深度估计的红外图像彩色化方法_戈曼
2017-03-17 10:13:010 针对当前物流配送中手持终端造成的信息采集单一和成本高昂,且缺乏送货监控的问题,提出一种基于手机Andriod系统的物流管理与监督系统。通过客户手机实现对物流信息采集的多样化,并借助用户和系统服务器
2017-11-13 14:23:284 本文在分析Rife,MRife和傅里叶系数插值迭代3种算法的基础上,将串行迭代变为并行迭代,由此得出了一种快速频率估计算法,并分析了新算法与前3种算法的异同。计算机仿真结果证实新算法能够快速、高精度估计单频信号的频率,便于工程实现,适合应用在雷达、电子对抗等对处理实时性要求非常高的领域。
2017-11-23 15:36:0010359 针对场景标注中如何产生良好的内部视觉信息表达和有效利用上下文语义信息两个至关重要的问题,提出一种基于深度学习的多尺度深度网络监督模型。与传统多尺度方法不同,模型主要由两个深度卷积网络组成:首先网络
2017-11-28 14:22:100 点模式匹配是目标识别、图像配准与匹配、姿态估计等计算机视觉与模式识别应用方向的基础问题之一。提出了一种新的利用点特征进行匹配的算法,该算法根据点集的分布与点位置信息,构建了点的特征属性图,通过极坐标
2017-12-05 19:08:072 太复杂,采用传统方法难以进行有效识别。针对手绘几何图形识别中结构分析这一核心技术问题,设计了一种几何图形结构描述模型,该模型通过对图元及其约束关系的形式化描述来表示图形,使用可伸缩矢量图形( SVG)标签存储图
2017-12-21 14:47:290 针对图像修复结果中存在物体结构上的不连续性和不完整性的问题,提出一种基于深度信息的图像修复算法。首先,通过建立平面参数马尔可夫模型来推测图像中像素点所在场景空间中的深度信息,从而划分出图像中的共面
2018-01-03 14:49:050 问题,对半监督学习中的协同训练算法进行改进,提出了一种基于多学习器协同训练模型的人体行为识别方法.这是一种基于半监督学习框架的识别算法,该方法首先通过基于Q统计量的学习器差异性度量选择算法来挑取出协同训练中基学习
2018-01-21 10:41:091 双目匹配需要把左图像素和右图中其对应像素进行匹配,再由匹配的像素差算出左图像素对应的深度,而之前的单目深度估计方法均不能显式引入类似的几何约束。由于深度学习模型的引入,双目匹配算法的性能近年来得到了极大的提升。
2018-06-04 15:46:4935978 
MACE,是指小米公司自研的移动端深度学习框架Mobile AI Compute Engine。2017年12月,这一深度学习框架就在小米公司内部正式发布了。
2018-07-26 14:06:464256 器,从单目图像中预测动作。虽然在训练该估计器的时候需要标注动作,不过一旦训练完成,估计器在应用到新图片上时就无需再次训练了。
2018-10-12 09:06:293329 深度压缩感知(DCS)框架通过联合训练生成器和通过元学习优化重建过程,显著提高了信号恢复的性能和速度。作者探索了针对不同目标的测量训练,并给予最小化测量误差推导出一系列模型。
2019-05-25 09:25:524316 
本文提出了一种自监督同变注意力机制(self-supervised equivariant attention mechanism,简称SEAM),利用自监督方法来弥补监督信号差异。在强监督语义分割的数据增广阶段,像素层级标注和输入图像需经过相同的仿射变换
2020-05-12 10:16:138561 
针对在传统机器学习方法下单幅图像深度估计效果差、深度值获取不准确的问题,提出了一种基于多孔卷积神经网络(ACNN)的深度估计模型。首先,利用卷积神经网络(CNN)逐层提取原始图像的特征图;其次,利用
2020-09-29 16:20:005 Approach for Image-Sentence Matching UsingDocument-Level Structural Information,提出了一种无监督设定下,更有效地利用多模态文档
2020-12-26 10:26:132928 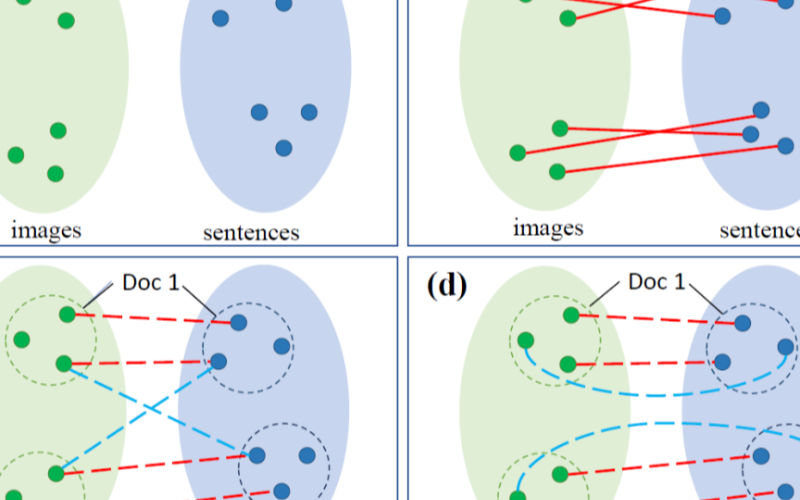
采用卷积神经网络对单目图像的深度进行估计时,存在深度信息不精确、边缘模糊以及细节缺失等问题。为此,提出一种多层级特征融合结构的深度卷积网络。该网络采用端到端的编-解码器结构,编码器
2021-03-16 09:21:207 为提高真实场景下头部姿态估计的准确性,提出一种采用深度残差网络的头部姿态估计方法。将深度残差网络 Restnetl01作为主干网络,引入优化器提高深层卷积网络训练时的梯度稳定性,使用RGB图像并采用
2021-03-16 11:27:448 岀一种基于框架特征的共指消解方法,该方法通过融合汉语框架语义信息并采用多种分类算法实现共指消解。框架语义篇章语料集上的实验结果表明,将汉语框架特征琙用亐分类器上能够较好地提升共指消解结果且支持向量机的分类
2021-03-19 11:35:197 为改善单目图像语义分割网络对图像深度变化区域的分割效果,提出一种结合双目图像的深度信息和跨层次特征进行互补应用的语义分割模型。在不改变已有单目孪生网络结构的前提下,利用该模型分别提取双目左、右输入
2021-03-19 14:35:2421 和数据有限的标签信息融入到CF模型中,提出了一种带有局部坐标约束的半监督的概念分解(SLCF)算法。SICF算法利用局部坐标约束学习数据的稀疏性,数据标签约束矩阵能够保证同类标签的数据映射到低维空间中拥有相同的标签,从而提高
2021-03-31 11:47:2210 非负矩阵分解(NMF)是一种非常有效的数据降维方法,广泛应用于图像聚类等领域。然而NMF是种无监督的方法,没有使用数据的标签信息,也不能捕获数据固有的几何结构,并且这是一种线性的方法,不能处理数据
2021-04-07 16:01:1230 。文中提岀了一种基于光滑表示的半监督分类算法。具体来说,此方法通过应用一个低通滤波器来实现数据的平滑,然后将光滑数据用于半监督分类。此外,所提方法将常见的图构造和标签传播集成到一个统一的优化框架中,使它们互相
2021-04-08 10:47:2817 演化算法和分析方法的结合是机器学习领域近几年的一个研究热点。研究如何将差分进化(DE)演化算法与基于超限学习机(ELM)的半监督分类算法相结合。首先,提出了一种基于DE和ELM的半监督分类方法
2021-04-09 16:16:215 交通流预测作为智能交通系统的一个关键问题,是国内外交通领域的硏究热点。交通流预测的主要挑战在于交通流数据本身具有复杂的时空关联,且易受各种社会事件的影响。针对这些挑战,提出一种用于交通流预测的深度
2021-04-14 15:54:183 【导读】Facebook的研究人员近日提出了一种用于超参数调整的自我监督学习框架。
2021-04-26 09:45:442159 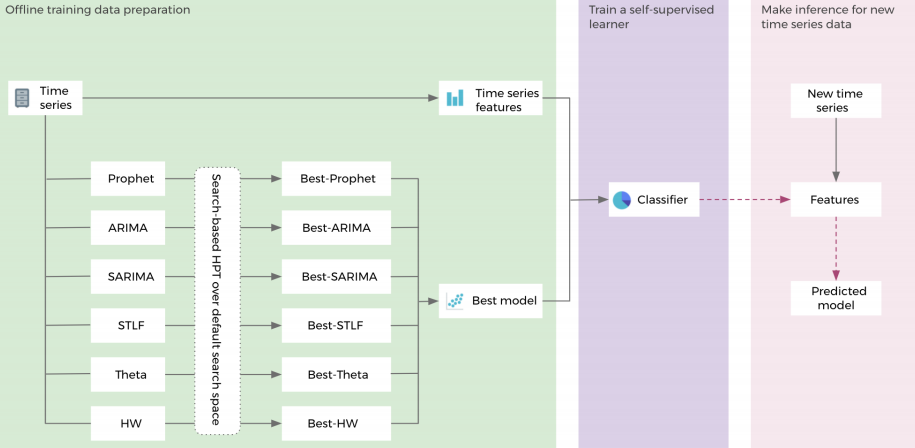
针对加权盖尔圆估计准则不能充分利用增广加权盖尔圆矩阵信息的不足,在该准则基础上提出一种融合多重特征的信源个数估计方法。利用阵列天线的接收信号构建增广加权盖尔圆矩阵,从中获取用于描述信源个数的盖尔圆心
2021-04-27 13:59:353 为了提高利用深度神经网络预测单图像深度信息的精确度,提出了一种采用自监督卷积神经网络进行单图像深度估计的方法。首先,该方法通过在编解码结构中引入残差结构、密集连接结构和跳跃连接等方式改进了单图像深度
2021-04-27 16:06:3513 自监督学习的流行是势在必然的。在各种主流有监督学习任务都做到很成熟之后,数据成了最重要的瓶颈。从无标注数据中学习有效信息一直是...
2022-01-26 18:50:171 一种基于伪标签半监督学习的小样本调制识别算法 来源:《西北工业大学学报》,作者史蕴豪等 摘 要:针对有标签样本较少条件下的通信信号调制识别问题,提出了一种基于伪标签半监督学习技术的小样本调制方式分类
2022-02-10 11:37:361362 本文由深兰科学院撰写,文章将为大家细致讲解一种有效的无监督深度表示器(Mix2Vec),该方法可将异构数据映射到统一的低维向量空间,避免混合异构数据相似度度量偏差问题。同时,该方法基于深度异构
2022-03-24 17:22:112272 为了解决大规模点云语义分割中的巨大标记成本,我们提出了一种新的弱监督环境下的混合对比正则化(HybridCR)框架,该框架与全监督的框架相比具有竞争性。
2022-09-05 14:38:002060 与被充分研究的单手姿态估计任务不同,交互手3D姿态估计是近两年来刚兴起的学术方向。现存的工作会直接同时预测交互手的左右两手的姿态,而我们则另辟蹊径,将交互手姿态估计任务,解耦成左右两手分别的单手姿态估计任务。这样,我们就可以充分利用当下单手姿态估计技术的最新进展。
2022-09-14 16:30:231464 基于几何的单目3D目标检测通过2D-3D投影约束估计目标的位置。具体来说,网络预测目标的尺寸(),旋转角。假设一个目标有n个语义关键点,论文回归第i个关键点在图像坐标中的2D坐标和object
2022-10-09 15:51:321675 作为一种能够直接测量深度的传感器,其相较于Lidar存在较大的误差,因此利用雷达本身精度难以精确地将雷达结果与单目方法的3D估计相关联。
2023-01-10 09:35:081807 我们提出了一种利用深度密集单目 SLAM 和快速不确定性传播从图像重建 3D 场景的新方法。所提出的方法能够密集、准确、实时地 3D 重建场景,同时对来自密集单目 SLAM 的极其嘈杂的深度估计具有鲁棒性。
2023-01-30 11:34:221235 一种无OS的STM32实用软件框架,包括任务轮询管理,命令管理器、低功耗管理、环形缓冲区等实用模块。系统中广泛利用自定义段技术减少各个模块间的耦合关系,大大提供程序的可维护性。
2023-02-24 18:00:041206 一般而言,单目是无法依靠自身来完成测量的,有企业选择让单目相机动起来,但是一旦动起来实际上也是双目,不再是单目。其实单目最大的问题是缺少了深度信息。近大远小是我们最常用的成像规律,近处物体在视场中占比大,远处物体在视场中占比小。
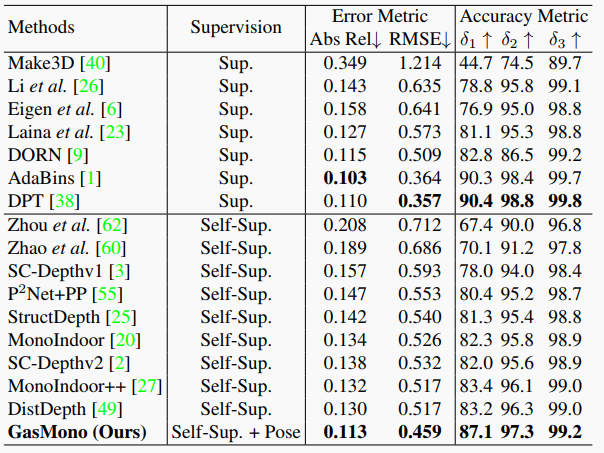
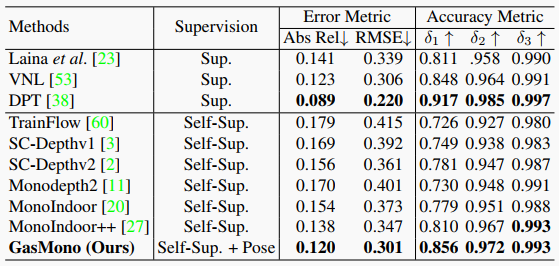
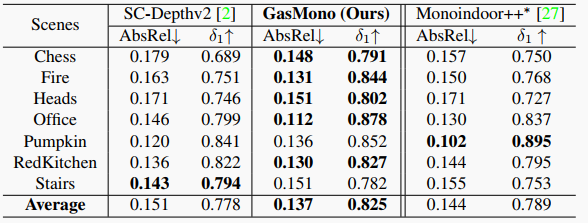
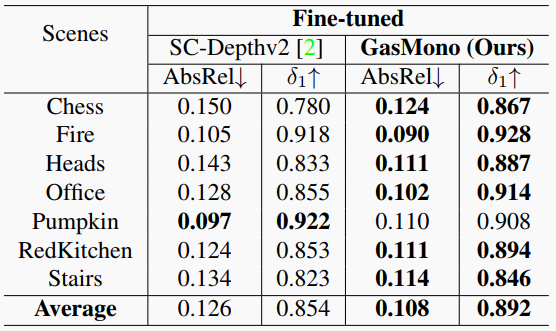
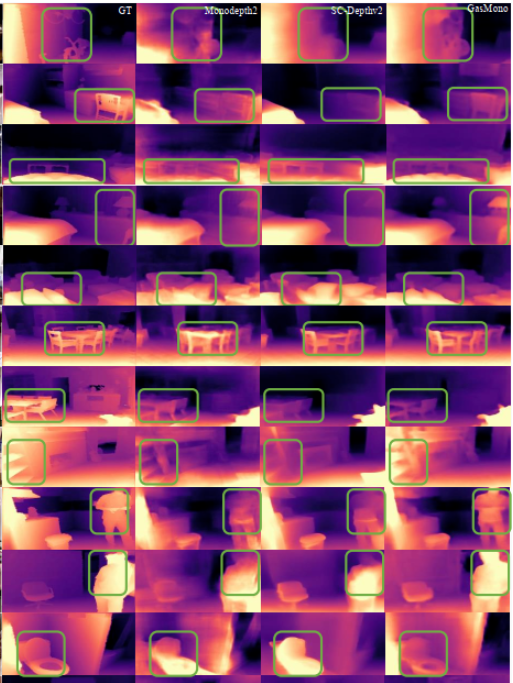
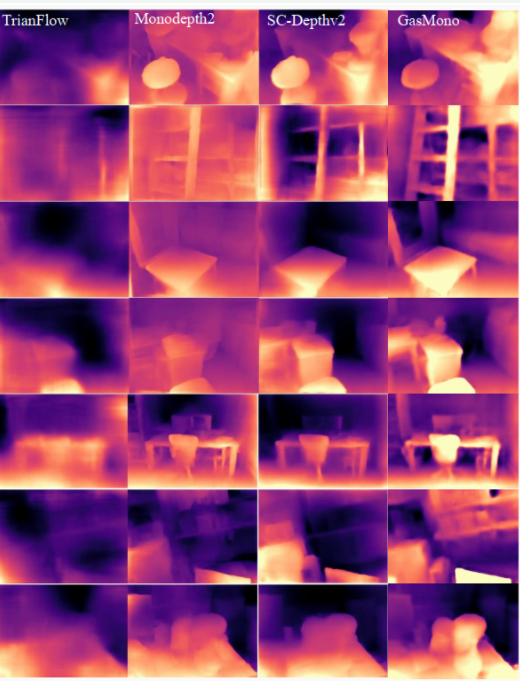
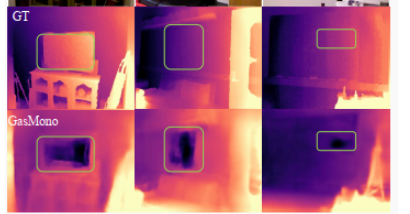
2023-03-01 11:19:432168 自监督单目深度估计不需要地面实况训练,近年来受到广泛关注。设计轻量级但有效的模型非常有意义,这样它们就可以部署在边缘设备上。
2023-03-14 17:54:163577 单目深度估计分为两个派系,metric depth estimation(度量深度估计,也称绝对深度估计)和relative depth estimation(相对深度估计)。
2023-03-21 18:01:258456 论文提出了PVO,这是一种新的全景视觉里程计框架,用于实现场景运动、几何和全景分割信息的更全面建模。
2023-05-09 16:51:582681 
本文提出了一种生产化的端到端立体深度感知系统设计,可以完成预处理、在线立体校正和立体深度估计,并支持纠偏失败后的单目深度估计备选方案。同时,该深度感知系统的输出应用于一种基于智能眼镜拍摄
2023-05-26 16:12:001354 
的深度回复能力。
神经网络给我们提供了一种全新的解决思路,使用cnn直接回归出目标在相机坐标系下的深度信息,这种做法可在一定程度上
达到激光雷达的效果,令人兴奋!如果使用多个不同焦距的相机进行拼接,完全有可能实现
2023-06-07 11:48:350 我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的区别是无法有效获取深度信息,那就首先从这方面入手,尝试通过图像获取摄像头与人的距离。
2023-07-03 10:01:474170 
由于噪声和退化,并非所有正确匹配都能给出良好的姿态。之前的操作仅保证具有判别性高的描述子的特征点有更高的匹配分数,并且首先被识别以参与姿态估计,但忽略了鲁棒姿态估计所需的几何要求。
2023-07-18 12:58:56960 
深度学习框架是什么?深度学习框架有哪些? 深度学习框架是一种软件工具,它可以帮助开发者轻松快速地构建和训练深度神经网络模型。与手动编写代码相比,深度学习框架可以大大减少开发和调试的时间和精力,并提
2023-08-17 16:03:093886 深度学习框架的作用是什么 深度学习是一种计算机技术,它利用人工神经网络来模拟人类的学习过程。由于其高度的精确性和精度,深度学习已成为现代计算机科学领域的重要工具。然而,要在深度学习中实现高度复杂
2023-08-17 16:10:572408 深度学习框架和深度学习算法教程 深度学习是机器学习领域中的一个重要分支,多年来深度学习一直在各个领域的应用中发挥着极其重要的作用,成为了人工智能技术的重要组成部分。许多深度学习算法和框架提供了
2023-08-17 16:11:261829 LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描,我们首先使用Ring FALS来估计原始点的法线,在使用IMU测量校正畸变后,根据它们的局部几何信息,在未畸变的点云和地图之间执行关联。
2023-08-18 15:45:301541 
本文提出了一种适用于动态场景的多层次地图构建算法,如图1所示的系统框架。首先,利用YOLOX[8]获取场景的语义信息,采用多目标跟踪算法对漏检进行补偿,利用DBSCAN密度聚类算法和深度信息进一步优化潜在移动物体的检测边界框。
2023-08-28 10:56:471268 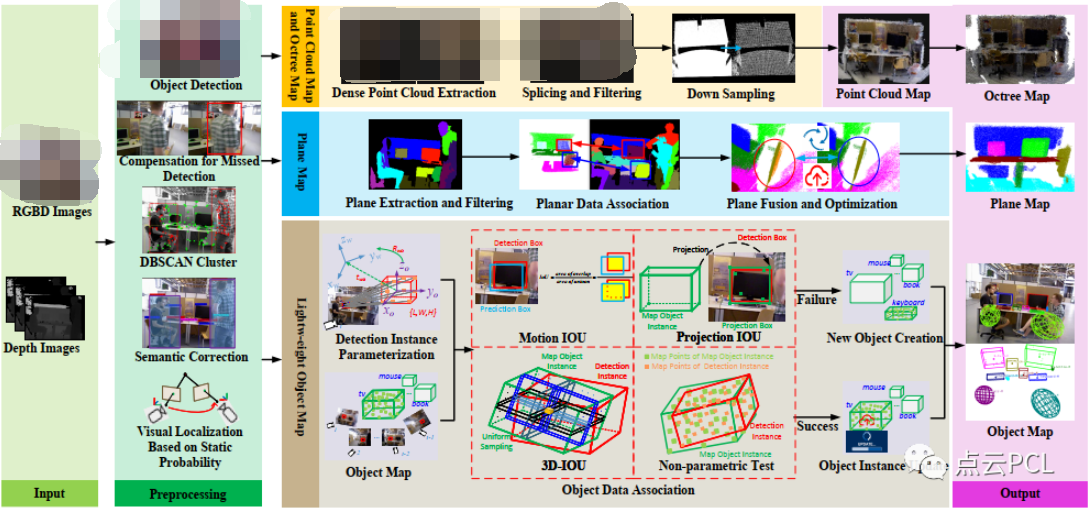
在这些情况下, 传感器自带的噪声、无纹理的黑暗区域和反光等不利因素都违反了基于监督和自监督学习方法的训练假设。自监督方法无法建立学习深度所需的像素的对应关系,而监督方法则可能从传感器真值中(如上图中的 LiDAR 与 nuScenes 的数据样本)中学习到数据瑕疵。
2023-09-04 16:14:201275 
自监督单目深度估计的训练可以在大量无标签视频序列来进行,训练集获取很方便。但问题是,实际采集的视频序列往往会有很多动态物体,而自监督训练本身就是基于静态环境假设,动态环境下会失效。
2023-11-28 09:21:341452 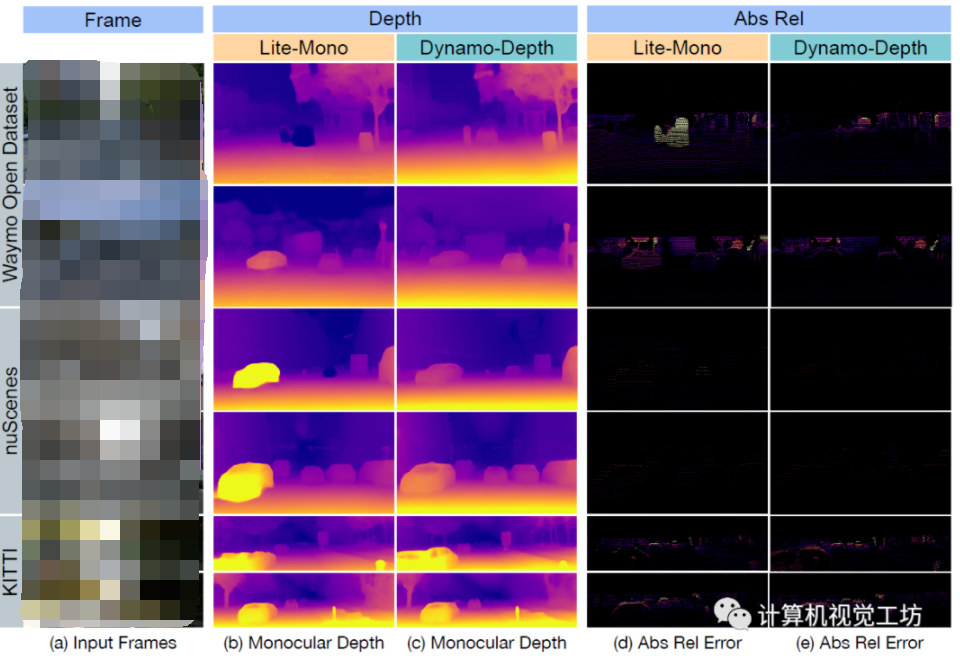
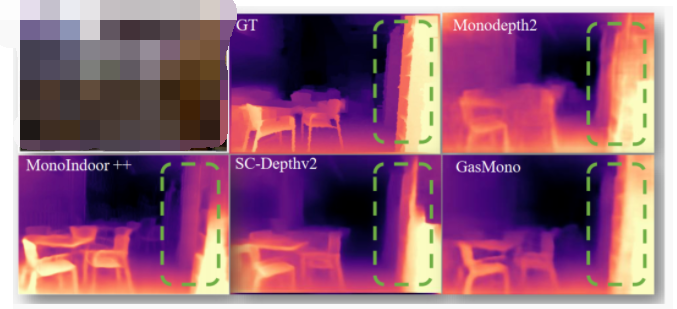
可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的新课程《单目深度估计方法:算法梳理与代码实现》。
2023-12-17 10:01:161572 
本文提出了一种全新的学习型PatchMatch MVS框架,DS-PMNet,并嵌入了DeformSampler。这个框架能够以端到端的方式学习隐含深度分布,指导可变形的深度采样。
2024-01-02 09:25:281585 
本研究提出了一种自监督的多摄相机3D占据预测方法,名为OccNeRF。该方法旨在解决无界场景的建模问题。
2024-01-02 14:53:531009 
运动恢复结构(SfM)是计算机视觉领域一个长期存在的问题,旨在根据每个相机拍摄的图像来估计场景的3D几何结构以及观测该场景的相机的参数。由于它方便地同时为相机和地图提供信息,因此构成了许多实用计
2024-10-28 14:13:002663 
Firefly所推出的NVIDIA系列的AIBOX可实现深度估计,该技术是一种从单张或者多张图像预测场景深度信息的技术,广泛应用于计算机视觉领域,尤其是在三维重建、场景理解和环境感知等任务中起到
2025-03-19 16:33:02979 
本文提出了一种稳健的单目视觉SLAM系统,该系统同时利用点、线和消失点特征来进行精确的相机位姿估计和地图构建,有效解决了传统基于点特征的SLAM的局限性。
2025-03-21 17:07:08930 
转化为三维信息,从而为车辆决策提供关键的深度感知能力。 什么是双目深度估计? 平时我们用眼睛看东西其实就是一种最自然的深度估计。人的两只眼睛有一定的间距,大脑通过融合两只眼睛看到的略有不同的图像来判断远近。计算
2025-12-31 09:45:50295 
 电子发烧友App
电子发烧友App

















 工商网监
工商网监
评论