 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
移动能力越来越重视,以至于“避障”是我们绕不开的话题。
避障与SLAM是既有联系又有区别的两个不同功能,虽然SLAM在建图过程中,已经通过一种或多种传感器进行了周边环境的障碍物检测,但是受限于目前主流SLAM技术的不成熟,避障问题无法得到很好的解决。
市面上常见的机器人大部分都是采用二维激光雷达导航,但是二维激光雷达在实际应用中仍有缺点。
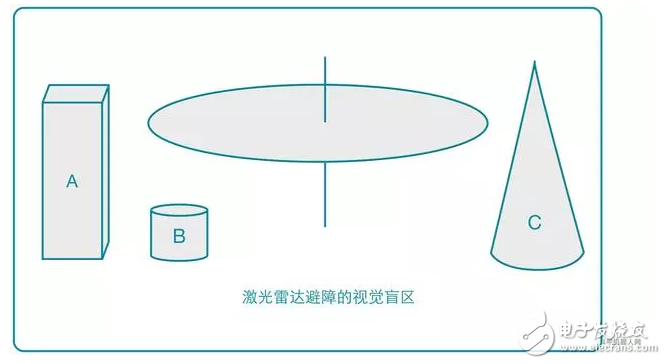
如图,二维激光雷达是360度水平视场角的距离测量,其量程范围内的多数障碍物都能因为对激光的反射而被测量到,但是激光雷达只能检测到A和C物体的存在,无法检测雷达扫描平面下的B物体,而如果A和C物体上下形状不一,则机器人无法根据雷达扫描测量障碍物距离的数据,实现准确避障。
所以在实际应用中,散落在地上的物体、凸起的台阶、桌子和椅子等都会对激光雷达避障形成挑战。
如果我们把这种需要考虑物体上下完整轮廓的障碍物检测称为“立体避障”。
在一些复杂的场所,二维激光雷达无法胜任立体避障的工作,必须要为机器人配备其它的传感器作为补充。
比如:超声波传感器,它的成本非常低,实施简单,可识别透明物体,缺点是检测距离近,三维轮廓识别精度不好,所以对桌腿等复杂轮廓的物体识别不好,但是它可以识别玻璃、镜面等物体。
还有深度相机,它具备三维的距离测量能力(同时具备水平和垂直视场角),因此,可以直接检测到立体的障碍物,为移动机器人提供三维的保护能力。
所以在高配的移动机器人中,可以采用激光雷达来实现SLAM,用深度相机来实现立体避障,再用超声波来防护激光雷达和深度相机的检测盲点,这三种传感器成为许多高端移动机器人的常见组合配置。
上海图漾信息科技有限公司(简称:上海图漾)副总经理徐韬说:“多数深度相机的垂直视场角在60度以下,平视安装的话对正面的立体避障物检测较好,但是对近距离处的低矮障碍物会存在较大的盲区。”

“如图,这种情况,一种方法是降低安装高度,另外一种方案是采用俯视的安装角度,但是这样都会造成对障碍物高度检测的缺失。”
因此,在实际使用中需要仔细考虑和设计相机的安装方式,如果对上下立体障碍物检测的要求都比较高的话,可以采用平视+俯视两套深度相机的方案进行组合。
以下是上海图漾提供的比较重要的深度相机规格参数供行业人士参考:
所有的相机都有其最短和最远的工作距离,典型的深度相机工作范围有0.3-3m(近距离版本)或0.5-5m(中距离版本),在最短距离内深度相机会完全看不到物体,这对机器人贴身处的防护可能会形成威胁,需要仔细考虑。
另外,分辨率越高,对物体的轮廓辨识度越好,但是成本和计算量代价也会更大,对于单纯避障而言,其实对物体轮廓的细节识别度要求不高,分辨率可以不高,比如480p等级即可。
最后,在深度相机的检测帧率需求跟机器人的移动速度相关,通常普通的商用或家用机器人移动速度并不快,多在1m/s左右,30fps的帧率,在帧延时较低的情况下,已经可以满足要求。
避障与SLAM是既有联系又有区别的两个不同功能,虽然SLAM在建图过程中,已经通过一种或多种传感器进行了周边环境的障碍物检测,但是受限于目前主流SLAM技术的不成熟,避障问题无法得到很好的解决。
市面上常见的机器人大部分都是采用二维激光雷达导航,但是二维激光雷达在实际应用中仍有缺点。
如图,二维激光雷达是360度水平视场角的距离测量,其量程范围内的多数障碍物都能因为对激光的反射而被测量到,但是激光雷达只能检测到A和C物体的存在,无法检测雷达扫描平面下的B物体,而如果A和C物体上下形状不一,则机器人无法根据雷达扫描测量障碍物距离的数据,实现准确避障。
所以在实际应用中,散落在地上的物体、凸起的台阶、桌子和椅子等都会对激光雷达避障形成挑战。
如果我们把这种需要考虑物体上下完整轮廓的障碍物检测称为“立体避障”。
在一些复杂的场所,二维激光雷达无法胜任立体避障的工作,必须要为机器人配备其它的传感器作为补充。
比如:超声波传感器,它的成本非常低,实施简单,可识别透明物体,缺点是检测距离近,三维轮廓识别精度不好,所以对桌腿等复杂轮廓的物体识别不好,但是它可以识别玻璃、镜面等物体。
还有深度相机,它具备三维的距离测量能力(同时具备水平和垂直视场角),因此,可以直接检测到立体的障碍物,为移动机器人提供三维的保护能力。
所以在高配的移动机器人中,可以采用激光雷达来实现SLAM,用深度相机来实现立体避障,再用超声波来防护激光雷达和深度相机的检测盲点,这三种传感器成为许多高端移动机器人的常见组合配置。
上海图漾信息科技有限公司(简称:上海图漾)副总经理徐韬说:“多数深度相机的垂直视场角在60度以下,平视安装的话对正面的立体避障物检测较好,但是对近距离处的低矮障碍物会存在较大的盲区。”
“如图,这种情况,一种方法是降低安装高度,另外一种方案是采用俯视的安装角度,但是这样都会造成对障碍物高度检测的缺失。”
因此,在实际使用中需要仔细考虑和设计相机的安装方式,如果对上下立体障碍物检测的要求都比较高的话,可以采用平视+俯视两套深度相机的方案进行组合。
以下是上海图漾提供的比较重要的深度相机规格参数供行业人士参考:
所有的相机都有其最短和最远的工作距离,典型的深度相机工作范围有0.3-3m(近距离版本)或0.5-5m(中距离版本),在最短距离内深度相机会完全看不到物体,这对机器人贴身处的防护可能会形成威胁,需要仔细考虑。
另外,分辨率越高,对物体的轮廓辨识度越好,但是成本和计算量代价也会更大,对于单纯避障而言,其实对物体轮廓的细节识别度要求不高,分辨率可以不高,比如480p等级即可。
最后,在深度相机的检测帧率需求跟机器人的移动速度相关,通常普通的商用或家用机器人移动速度并不快,多在1m/s左右,30fps的帧率,在帧延时较低的情况下,已经可以满足要求。
机器人

加入交流群
扫码添加小助手
加入工程师交流群
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 机器人红外避障 0次下载
- 蓝牙控制的避障机器人
- 伺服电机避障机器人
- 基于Arduino UNO的避障机器人 3次下载
- 如何制作避障机器人
- 智能避障机器人开源分享
- 基于Arduino的避障机器人汽车
- Arduino机器人避障
- arduino nano避障机器人
- 基于降级模糊避障控制算法的爬壁机器人 17次下载
- 基于区块链的侦查机器人实时避障设计方案 10次下载
- matlab机器人避障的程序免费下载 8次下载
- 如何进行简易避障机器人的设计 27次下载
- 吸尘机器人系统设计与避障算法研究 4次下载
- 自主机器人避障方法研究 0次下载
- 微雪电子红外接近传感器 红外避障模块简介 3.7k次阅读
- 微雪电子 Micro:bit轮式智能机器人简介 3.4k次阅读
- 微雪电子轮式智能机器人简介 1.9k次阅读
- dfrobotminiQ 4WD教育机器人介绍 2.8k次阅读
- 工业机器人技术应用 6.1k次阅读
- 机器人视觉避障的常用传感器介绍和原理说明 1.4w次阅读
- 机器人底盘的主要三大技术 8.8k次阅读
- 机器人避障技术还需解决哪些问题? 1.3w次阅读
- 浅谈智能机器人中的技术支撑 4.7k次阅读
- 如何解决机器人“避障”的问题 5k次阅读
- 基于STM32的家庭服务机器人系统工作原理及设计 1.5w次阅读
- 机器人自动喷涂系统浅谈 1.8w次阅读
- 模拟智能家居的环境下的家庭服务机器人系统的设计 2.2k次阅读
- 什么是无人机避障技术 在消费级无人机领域为什么火不了? 3.7k次阅读
- 让机器人实现避障6种的方,图文详解 2.7w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费



 工商网监
工商网监
评论