 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
工业机器人柔性制造加工生产线的布置
自动生产线的布置形式是生产线设计时根据加工零件的工艺要求合理布置加工设备的重要步骤,需综合考虑零件的加工工艺、加工设备的功能、物流输送的方式、专用设备的功能、安全保护的实施、中间过程的储料、机械手的承载、工件姿态的转换、定位夹紧的方式、工厂占地面积等,通过综合分析上述项目,设计出符合加工工艺要求的经济实用的生产线总体方案图,设计时需综合多种因素、通盘考虑、兼顾全局,不断改进、逐步优化,最大限度的发挥生产线各组成部分的功能,使生产线达到实现功能最多、使用设备最少、制造成本最低、占地面积最少的高性价比自动化生产线,从而为企业提供最佳的自动化生产线解决方案。
自动生产线按使用的机器人的不同分为:
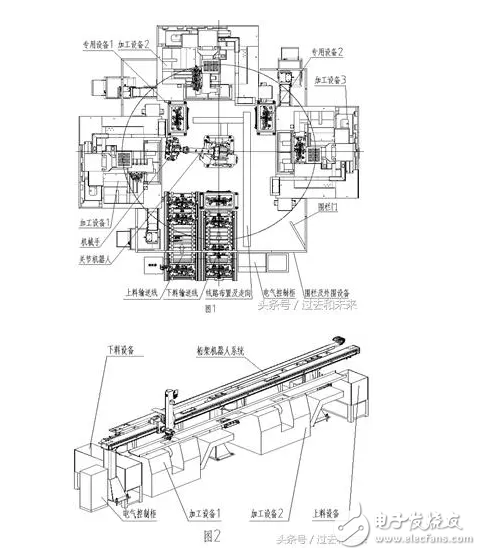
关节式机器人自动生产线(图1)
桁架式机器人自动生产线(图2)
工业机器人柔性制造加工生产线的组成
上料设备
是给自动生产线提供毛坯坯料的自动输送设备,它是生产线加工产品的输入设备,常采用皮带输送、自动辊道输送、悬挂链输送、地推链输送、板链输送等,设备上具有工件定位、输送导向、工件停止、到位检测等机构,以实现工件的准确、可靠的传输。
机器人系统
是自动生产线的核心组成部分,是加工零件在各加工设备间流转的执行机构,包括机器人本体、机械手、机器人控制系统。具有运行速度快、定位精度高、回转自由度多的特点。是集检测、定位、夹紧、回转、松开、移动于一体的智能化设备。
各工序加工设备
是实现零件加工的数控加中心或数控专用设备(数控车床或数控磨床等),是零件加工的主体设备。设备由独立的数控系统控制,具备自动开关门,自动换刀、自动对刀、自动切削、自动排屑,甚至自动在线检测等功能,能将零件按CNC程序的要求加工至符合工艺尺寸和精度要求,是现代制造业中,不可缺少的自动化加工设备。
专用设备
是自动生产线中用于完成某一特定功能、由设计人员专门设计的自动化专用设备。是自动生产线中不可缺少的重要组成部分,如零件流转过程中的姿态翻转或转向工作台、满足工艺要求的工装装配或拆卸工作台、零件加工过程中的尺寸精度检测工作台、重要零件气密性检测工作台、零件输送过程中的储料工作台、零件流转过程中的清洗清洁工作台、零件检测完成后合格品及不合格品的自动分流工作台等。
下料设备
是自动生产线中将加工完成的成品零件自动输送出加工区域的专用设备,是生产线加工产品的输出设备,常采用皮带输送、自动辊道输送、悬挂链输送、地推链输送、板链输送等,设备上具有工件定位、输送导向、工件停止、到位检测、错位报警、防撞防碰、废液收集等机构,以保证工件完好无损、准确可靠的输出。
围栏及外围设备
是自动生产线中将加工区域与外围环境隔开的安全保护围栏及安全保护控制设备。包括安全围栏、安全门、安全光栅、安全门锁、踏脚板等相关辅助设备。安全光栅、安全门锁等安全保护装置的信号与生产线系统控制部分相串联。在机器人工作时,只要任何一处安全装置的信号发生变化,机器人和整个生产线就会自动停止运行,并发出故障报警信号,从而确保操作人员和加工设备的绝对安全,及时提醒维护人员排除设备故障。
线路布置及走向
是自动生产线中各相关设备的动力线路、控制线路、气源管路、液压油路的布置形式及相关走向。包括主控电柜位置、操作电柜位置、中间接线盒位置、气源处理及分配器位置、液压站位置等。线路布置形式可采用空中桥架布置、地面走线槽布置、地沟走线槽布置。线路布置时应将电缆线、控制线、气管、油管等分开布置,桥架或线槽应布置整齐、固定可靠、线路最短,防潮、防油、防干涉、放磕碰。
工业机器人柔性制造加工生产线设计的步骤和思路
通过分析机器人自动化生产线加工零件的相关工艺参数和生产线布置的相关技术要点,对机器人自动生产线设计的步骤和思路提出以下几点要求:
充分分析加工零件的工艺性,明确加工所需的相关工艺参数;
根据参数选取适合零件加工所需的各种工艺装备,包括机床、夹具、刀具、检测设备等;
根据生产场地和零件的加工设备,选择便于工件抓取和装夹的机器人,设计相应合适的机械手。
考虑上述自动化生产线总体布置时的相关事项,并通过具体分析逐项明确各项的技术要点,使总体设计内容更加清新和完整;
根据上述内容绘制生产线具体的总体布置方案图,在图上标注出物流的方向,各部分设备的相关功能等;
根据加工过程中零件流转的先后顺序和时间长短,绘制零件加工自动生产线的循环周期表;
对可能出现的几种总体布置方案进行工艺性和经济性分析,选择占地面积最少、工艺性能最好、制造成本最低的总体布置方案。
对方案图做进一步细化和完善,使设计文件符合工厂实际生产的要求。
- 基于工业物联网的数据驱动流程生产线 13次下载
- 基于Matlab的机构与机器人分析资料下载 11次下载
- ABB-IRB120机器人紧凑柔性生产的理想之选 6次下载
- 使用机器视觉进行工业机器人分拣技术的研究资料分析 31次下载
- 工业机器人空间运行轨迹规划 3次下载
- ABB焊接机器人硬件系统组成及其原理和故障分析 13次下载
- 工业柔性喷涂七轴机器人 0次下载
- 机器人柔性激光切割的发展 1次下载
- 水龙头机器人打磨抛光生产线-2 0次下载
- 工业机器人分布式控制系统实例 112次下载
- 空间柔性机器人动力学分析的快速积分算法
- 准柔性生产线通用数控系统的研究
- PLC在机器人喷涂生产线控制中的应用
- 机器人焊接生产线监控系统的设计
- 平面体系的几何组成分析
- 步进电机在工业机器人中的应用 410次阅读
- 基于智能制造的工业机器人应用实践 817次阅读
- 柔性制造是什么意思?什么叫柔性制造系统?柔性生产线的特点 6562次阅读
- 工业机器人与PLC混合编程控制的通讯连接介绍 4944次阅读
- 工业机器人与PLC的通讯连接方式和控制方法 1.5w次阅读
- 智能化高柔性生产线管控系统解决方案 6697次阅读
- 工业机器人编程入门_工业机器人的编程要求 9567次阅读
- 弧焊机器人结构组成及性能参数 5993次阅读
- 什么是柔性机器人?柔性机器人的材料和驱动 1.9w次阅读
- 揭秘起亚汽车的柔性化生产线 5081次阅读
- 工业机器人的技术解读与现状分析 6999次阅读
- 何为柔性机器人?如何让机器人的身体柔若无骨? 1.1w次阅读
- PCB行业新技能:自动化设备+工业机器人 5201次阅读
- 工业机器人技术科普及全球知名企业盘点 1.2w次阅读
- 机器人技术科普之必知工业机器人分类 3092次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1Keysight B1500A 半导体器件分析仪用户手册、说明书 (中文)
- 19.00 MB | 4次下载 | 免费
- 2使用TL431设计电源
- 0.67 MB | 2次下载 | 免费
- 3BT134双向可控硅手册
- 1.74 MB | 2次下载 | 1 积分
- 4一种新型高效率的服务器电源系统
- 0.85 MB | 1次下载 | 1 积分
- 5LabVIEW环形控件
- 0.01 MB | 1次下载 | 1 积分
- 6PR735,使用UCC28060的600W交错式PFC转换器
- 540.03KB | 1次下载 | 免费
- 751单片机核心板原理图
- 0.12 MB | 1次下载 | 5 积分
- 8BP2879DB支持调光调灭的非隔离低 PF LED 驱动器
- 1.44 MB | 1次下载 | 免费
本月
- 1开关电源设计原理手册
- 1.83 MB | 52次下载 | 免费
- 2FS5080E 5V升压充电两串锂电池充电管理IC中文手册
- 8.45 MB | 23次下载 | 免费
- 3DMT0660数字万用表产品说明书
- 0.70 MB | 13次下载 | 免费
- 4UC3842/3/4/5电源管理芯片中文手册
- 1.75 MB | 12次下载 | 免费
- 5ST7789V2单芯片控制器/驱动器英文手册
- 3.07 MB | 11次下载 | 1 积分
- 6TPS54202H降压转换器评估模块用户指南
- 1.02MB | 8次下载 | 免费
- 7STM32F101x8/STM32F101xB手册
- 1.69 MB | 8次下载 | 1 积分
- 8基于MSP430FR6043的超声波气体流量计快速入门指南
- 2.26MB | 7次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935119次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420061次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233084次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191367次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183335次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81581次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73807次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65987次下载 | 10 积分





 工商网监
工商网监
评论