 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
PCB图如下: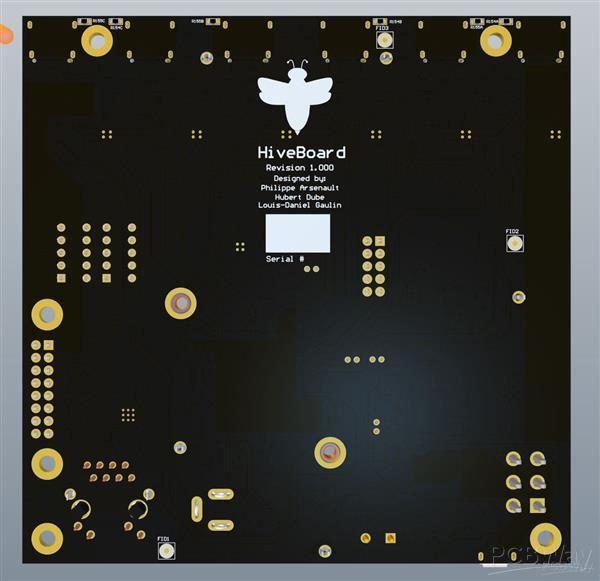
描述
团队
SwarmUS 是一个由 9 名来自舍布鲁克大学的工程专业学生组成的团队,他们的学士学位毕业时间定于 2021 年 12 月结束。SwarmUS 在工程领域拥有多学科专业知识,因为其成员来自计算机、电气和机器人工程。
该项目
该项目旨在建立一个开放的软件和硬件平台(分别为 Hivemind 和 Hiveboard),允许实施机器人群,从异构机器人和 Android 智能手机进行同步定位和映射 (SLAM)[1]。Android 手机可以用作增强现实界面来查看生成的共享地图,也可以用作机器人群的控制界面。这项技术突破正在一个重大工程设计项目中进行,并将在 2021 年 MegaGéNIALE 博览会上展示。该项目本质上是学术性的,将由机器人研究小组 IntRoLab[3] 的 3IT[2] 的客户使用。
什么是 MégaGéNIALE 博览会?
MégaGéNIALE Expo 是加拿大最大的大学工程项目展览。这是一个独特的机会来发现每个工程领域的毕业生的工作,即:建筑、土木、化学、生物技术、电气、计算机、机械和机器人技术。该活动每年吸引约 4,000 人参加。有关活动的更多信息和往年活动的照片,请访问以下页面:
机器人部分
先锋 2DX 机器人
SwarmUS 团队的任务是更新其客户实验室 (IntRoLab) 未使用的两台旧 Pioneer 2DX。这些机器人不仅会返还给客户,还会作为基准测试来测试我们的 swarm 平台。由于这些机器人的电子设备和软件已经过时,因此需要对该机器人进行全面升级,只保留底盘和电机。

力量
机器人由 12V GOOLOO GP37-Plus LiPo 电池供电。这些电池具有一些内部保护和集成充电器,从而简化了围绕机器人电源的设计。但是,需要额外的欠压保护,以防止机器人将电池电量耗尽至低于 LiPo 电池的电压限制。
欠压锁定板
然后,该团队设计了一个包含欠压锁定 (UVLO) 和电压监控电路的定制 PCB。该解决方案在电压降至选定阈值以下时会发出高音,并在另一个较低阈值以下打开主电源继电器。
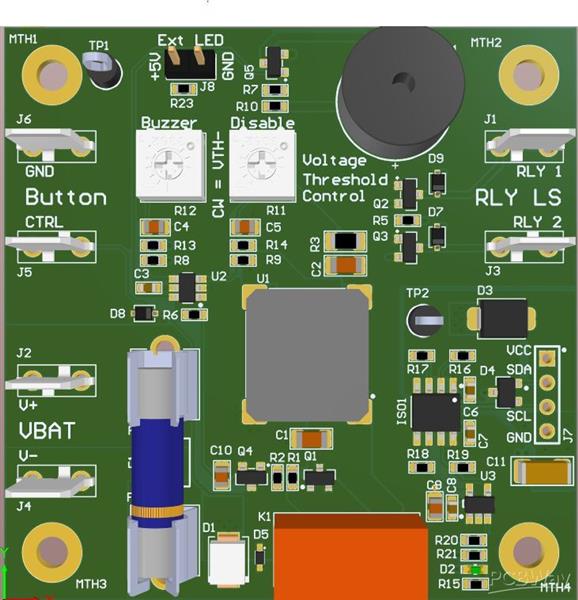
电力调配
电源树分为 3 个主要部分:12V 主电源、12V 电机电源和 5V 计算机电源。一个由拨动开关和 UVLO 板控制的主继电器将电池连接到 12V 主电源,该主电源反过来为 5V@5A 稳压器和另一个控制电机电源的继电器供电。电机继电器由红色蘑菇按钮控制,可在紧急情况下轻松切断电机的 12V 电源。5V 稳压器为主计算机和所有机器人传感器供电。

传感器、计算机和电机控制器
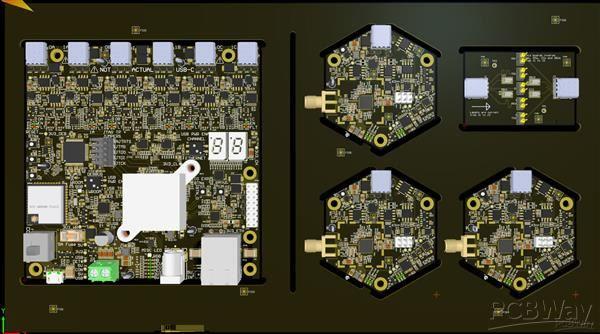
机器人大脑是在 Linux 20.04.1 LTS 上运行的 Raspberry Pi 4 4GB。为了感知其环境,机器人配备了 RPLidar A2M8 以可视化其周围的障碍物,并配备了 Realsense D435i 或 Realsense D455,具体取决于机器人,以获得其前方场景的视觉和深度信息。除了传感器之外,BasicMicro 的 RoboClaw 2x60A 还用作电机控制器,因为它具有内置保护、PID 控制和正交编码器读取功能。电机控制器和所有传感器通过 USB 连接到 Rasberry Pi。此外,Hiveboard 和 BeeBoards 被集成到机器人中,并通过以太网连接到 Raspberry Pi,为机器人提供必要的硬件来加入一个群体。

机械改装
电子元件和计算机由采用激光切割技术制成的木板进行维护,以完美贴合机器人狭窄的内部。机器人的传感器支撑和侧面板是 3D 打印的,为我们在设计过程中提供了更大的灵活性。
机器人软件
Raspberry Pi 在 ROS(机器人操作系统)中间件中运行所有机器人的软件。在传感器、导航堆栈和 RTAB-Map 的帮助下,机器人可以在其环境中移动,同时对其进行映射并在其中定位自己。团队制作了额外的 ROS 包,以将 ROS 环境连接到在 HiveBoard 上运行的 HiveMind,让群体行为控制机器人。
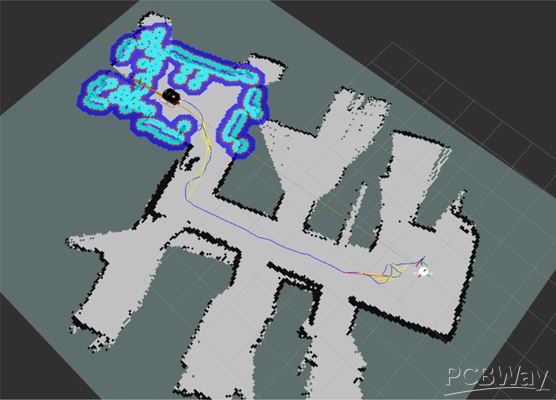
我们的一个机器人制作的地图
硬件部分
以下部分将详细介绍 SwarmUS 项目的 3 块 PCB:
· HiveSight:Decawave 超宽带 (UWB) 集成电路 (IC) DW1000 的测试平台
· Hiveboard:上一次迭代的中心板
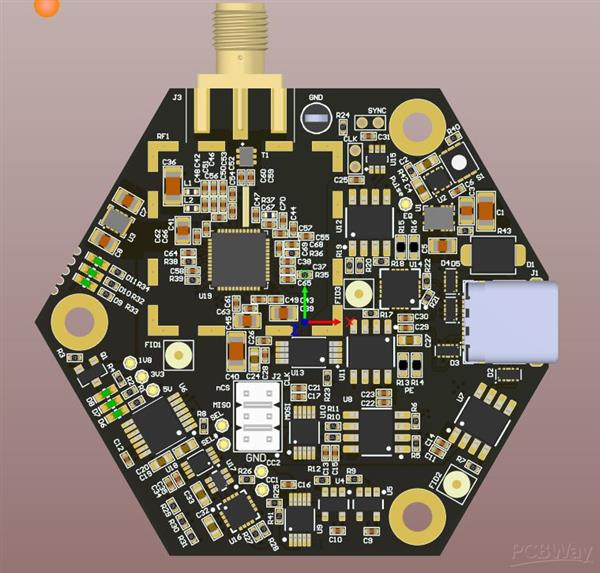
· BeeBoard:UWB“传感器”
HiveSight
如前所述,HiveSight 是团队的测试平台。它证实该团队可以使用我们可以使用的设施来制作功能正常的 PCB(从设计到测试)。它也是 UWB 技术的测试平台。让我们回顾一下董事会:
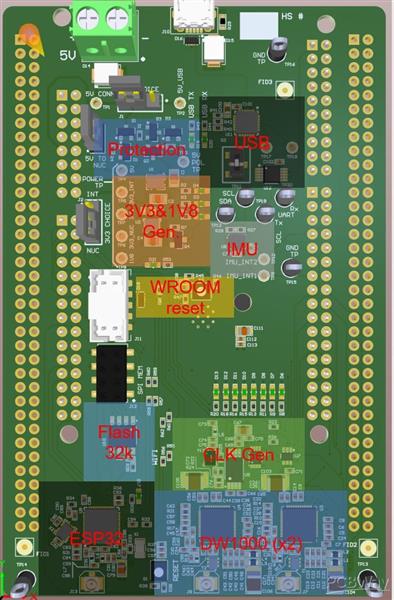
1、保护:具有过压、过流、反极性功能
2. USB:USB IC打开一个COM端口用于调试目的。它连接到 u-USB 端口
3. 3V3&1V8 Gen:板载 3v3 和 1v8 电源轨生成。1.8V 来自 3.3V 电源轨。板上的所有组件都使用 3.3V 电源轨。只有 Decawave IC DW1000 使用 1.8V 电源轨。
4. IMU:惯性测量单元
5. WROOM 复位:ESP32-WROOM 的物理按钮(位于 PCB 的底部) ESP32-WROOM 是一个 Wi-Fi IC。
6. Flash 32k:32 Kb闪存。由我们的 ESP32 定制解决方案使用。
7. ESP32:ESP32(Wi-Fi IC)的自定义实现。此实现用于在我们的自定义实现和 WROOM IC 之间进行比较。
8. CLK Gen:为 DW1000 生成 38.4MHz 时钟。还包括两个 DW1000 的同步信号。
9. DW1000:超宽带IC。用于定位其他 HiveSight 的距离和角度。每个 DW100 有 4 个 LED 用于调试目的。
我们对 DW1000s 的实施基于 decawave 发布的白皮书,并且在我编写这些行时正在由我们的团队进行测试。但是,我们确实设法在设计中发现了一些错误。
5V 电源轨可以来自 2 个不同的地方:
· 从左上角的绿色连接器
· 从 u-USB 连接器
此外,3.3V 电源可以来自 3V3 电源轨或由 Nucleo 供电。Hivesight 还可以为 Nucleo 提供 5V 或 3.3V 电压。然而,在测试我们的设计时,我们注意到当 Nucleo 向 HveSight 提供 3V3 电压时,它会闪烁过电流警告。我们建议为 HiveSight 使用单独的(如绿色连接器/u-USB 连接器)电源。
HiveSight 和 Nucleo 之间的 SPI 通信有点不足,因为我们在布线时没有正确处理 SPI 线路(从上到下变化太多),并且接地回路不是最小的。我们没有正确连接 HiveSight 的每个连接器的接地,这会减慢 SPI 总线。我们可以做的总线的最大速度是 1Mbit/s 的数据。
到COM口IC的USB线切换了正负数据线,导致COM口出错。我们建议通过移除 ESD 保护并焊接一些导线来更改设计或以正确的顺序放置数据线。在我们的实现中,这是我们使用的方法,并在顶部涂上热胶以防止意外断开连接。

此外,IMU 从未安装在我们的版本上,因为足迹没有焊膏开口,因此没有焊料,并且该部件从未连接到电路板。这个简单的错误将在下一个实现中修复:Hiveboard。
HiveSight 设计用于与 STM32F429ZIT Nucleo 一起使用(尽管丝印上提到了 STM32F426,这是我们的另一个错误)。
所有文件(原理图、BOM、PCB、Gerbers)都在 Github 链接中。
更多详情:https ://github.com/SwarmUS
代码
Git 上的代码
https:///www.github.com/swarmus
- Hoverboard转换为Ai机器人平台或RC-Vehikel
- AUTO CUBEROS机器人开发平台 2次下载
- 用于TI RSLK MAX机器人平台的IR RX/TX BoosterPack
- SwarmUS异构机器人平台
- 基于DSP和PC的农业机器人控制系统 17次下载
- 机器人操作系统的资料简介 13次下载
- 如何实现双足机器人的步态规划与仿真研究 15次下载
- 一种小型双足人形机器人平台的研究与开发 14次下载
- 竞赛机器人制作技术PDF电子书免费下载 44次下载
- 详解图灵机器人,国内最早开放的人工智能机器人平台 0次下载
- 中型自主式足球机器人平台设计 0次下载
- 嵌入式智能机器人平台研究 11次下载
- RoboCup Rescue 平台搭建及运行 8次下载
- 基于RTOS的机器人平台控制系统 41次下载
- 基于C8051F020 的遥控机器人平台控制系统设计
- 使用Simulink和Simscape构建人形机器人头部的数字孪生 905次阅读
- 如何使用DonkeyCar平台构建一个自主机器人 2114次阅读
- 基于嵌入式处理器S698-T芯片实现机器人移动平台电控系统的设计 3758次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- dfrobotGMR通用机器人扩展板简介 1431次阅读
- dfrobot迷你十字套筒简介 1229次阅读
- dfrobotDevastator履带机器人移动平台简介 1515次阅读
- dfrobotDevastator履带机器人移动平台简介 1471次阅读
- dfrobot切诺基4WD智能机器人开发平台介绍 1458次阅读
- ATRIAS机器人可以像人类一样行走,完美跨越 5974次阅读
- 基于工业互联网平台的工业机器人故障检测方案规划 1w次阅读
- 机器人如何识别颜色 2.5w次阅读
- 基于三轴台式工业机器人平台的通用性控制软件 4027次阅读
- 机器人系统常用仿真软件介绍和效果 8375次阅读
- 如何使用HRMRP机器人平台构建机器人应用系统 1629次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论