 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
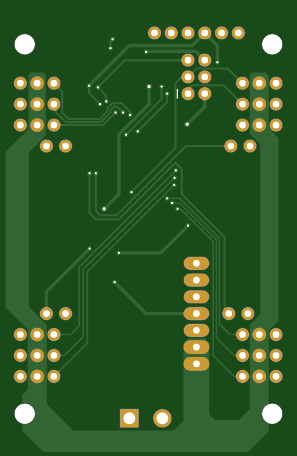
电路板图如下: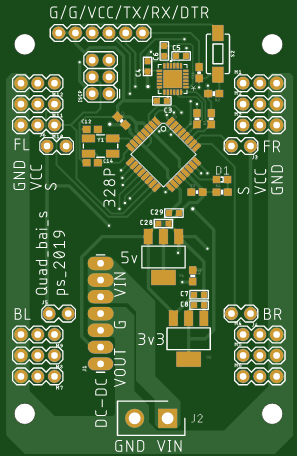
成分
|
ATMEGA328P-PU 微芯片技术/爱特梅尔 |
× 1 |
|
TPS61088RHLR TI(德州仪器) |
× 1 |
|
MPU-6050 TDK InvenSense |
× 1 |
描述
四足白伺服
关于
Github
由爱好伺服驱动的低成本 12DOF 四足动物。请注意,这是 2019 年开发的早期版本。如果您正在寻找高性能桌面 Quad,请查看正在进行的 [Quadruped bai tiny](https://github.com/psrobotics/Quadruped_bai_tiny)
硬件
所需部件如下所列。对于所有打印部件,推荐的打印填充量为 70%。根据您的打印机类型设置正确的打印方向和支持。
| 零件名称 | 数量 | 链接 | 信息 |
| -------------------------------------------------- --------- | -------- | -------------------------------------------------- ---------- | ------------------- |
| 腿尖 | 2 | [STL 文件](硬件/stl) | 印刷部分 |
| leg_tip_MIR | 2 | / | / |
| 腿_2 | 2 | / | / |
| leg_2_MIR | 2 | / | / |
| leg_link_1 | 2 | / | / |
| leg_link_1_MIR | 2 | / | / |
| leg_link-1 | 2 | / | / |
| leg_link-1_MIR | 2 | / | / |
| 腿_1 | 2 | / | / |
| leg_1_MIR | 2 | / | / |
| 腿_1_2 | 2 | / | / |
| leg_1_2_MIR | 2 | / | / |
| 伺服支架_1 | 2 | / | / |
| 伺服支架_1_MIR | 2 | / | / |
| hip_joint_holder_1 | 2 | / | / |
| hip_joint_holder_1_MIR | 2 | / | / |
| hip_holder_2 | 2 | / | / |
| hip_holder_2_MIR | 2 | / | / |
| 联合持股人 | 2 | / | / |
| 身体桥 | 2 | / | / |
| body_frame_2 | 1 | / | / |
| body_frame_1 | 1 | / | / |
| pcb_holder | 2 | / | / |
| M3*8 | 〜20 | / | 螺丝 |
| M3*12 | 〜30 | / | / |
| M3*16 | 〜20 | / | / |
| M2*8 | ~50 | / | / |
| M2*15 | ~50 | / | / |
| M2*20 | 〜20 | / | / |
| M2*26 | 〜20 | / | / |
| SF-1 0305 自润滑复合轴承衬套 | 〜25 | [易趣]()| 用于旋转接头 |
| EMAX ES08A II 伺服 | 12 | [ EMAX ]() | 执行器 |
打印零件后,将轴承插入旋转接头周围的所有 5mm 孔中。然后用 M3 螺丝固定零件。记得检查旋转摩擦,确保所有关节在安装舵机的情况下可以自由旋转。
伺服选择
致动器的性能对于腿式机器人至关重要。即使我们正在建造一个小型的。这种设计的理想执行器应该是高度可反向驱动的,具有高功率密度,并且是扭矩可控的。然而,大多数现成的伺服系统与这些功能无关。有一些高压无刷伺服系统(带有用于反馈的磁性编码器)具有相对较好的性能,但在这种尺寸下它们非常昂贵。如果你有足够的预算,为什么不建造一个无刷的呢?考虑到您需要 12 个伺服器进行组装,我的建议只是选择预算。EMAX ES08A(金属齿轮版)适用于我的构建。尼龙齿轮版本也是可以接受的,但它们在冲击下很容易损坏。
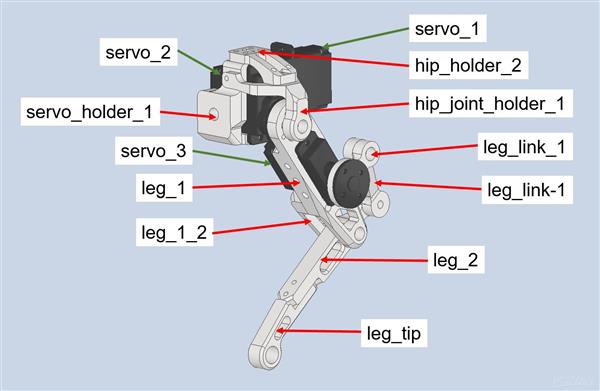
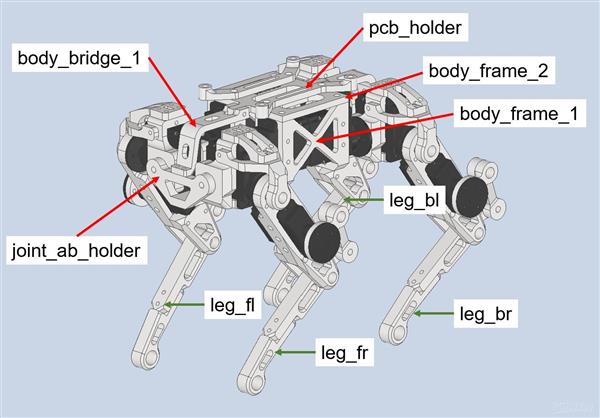
车身总成
该机器人由 4 条腿和一个身体框架组成。先组装 2 条腿。
组装另外 2 条镜腿。然后将所有腿连接到身体框架。
脚传感器(可选)
额外的脚传感器可以检测脚是否接触地面。这在将状态机从“摇摆状态”更改为“站立状态”时会很有帮助。Quadruped bai 伺服的脚是可切换的。如果您决定添加脚传感器,则需要对固件进行一些额外的配置(稍后会详细说明)。
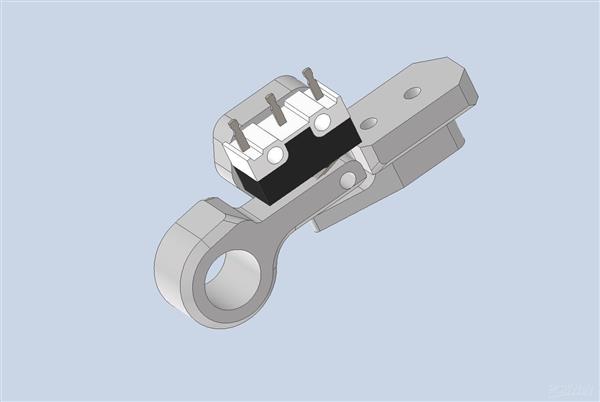
脚传感器围绕微型开关构建,可检测来自特定方向的冲击。至于结果,这个设计并没有那么好。一个好的脚传感器解决方案应该能够检测来自各个方向的冲击,具有低延迟和清晰的输出。[Open Dynamic Robot Initiative]提出了一个带有红外传感器的优雅解决方案。以此作为参考,正在进行的 Quadruped bai tiny 将配备更好的脚传感器。如图所示组装脚传感器。(记得打印右侧腿的镜像部分)
组装脚传感器只需要 3 个打印部件,请在此处查看 [STL 文件](hardware/stl/feet_sensor)。
为了增加脚与地面之间的摩擦力,额外的高摩擦涂层至关重要。我在脚尖上使用了一些胶合硅胶片。您还可以设计脚尖并用高摩擦材料打印。
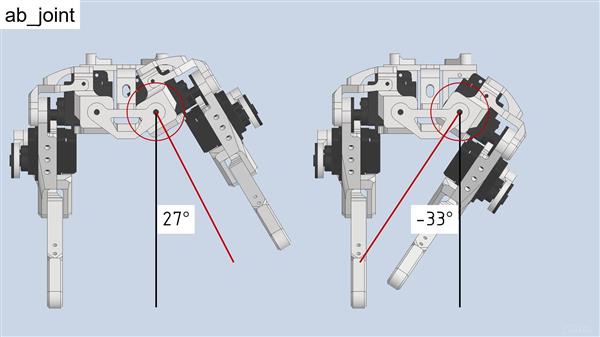
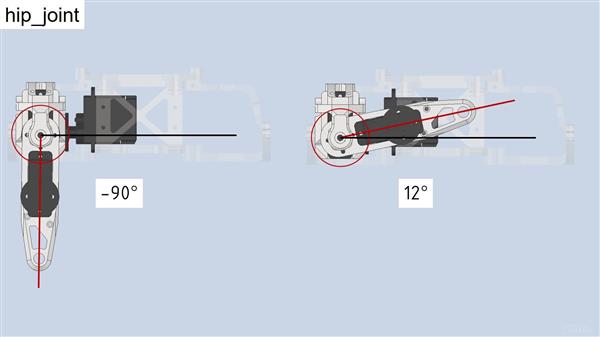
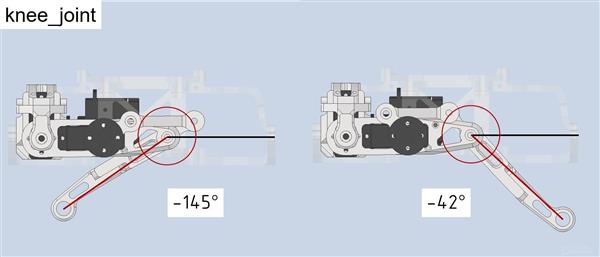
伺服校准
大多数舵机的运动范围都是有限的,请确保舵机的运动范围涵盖下图所示的腿连杆关节极限。此外,在此步骤中通过在安装前向伺服系统应用初始 PWM 信号(例如 0°)进行预校准。这使所有伺服系统都具有相同的 PWM 关节角度映射。然后,您可以在固件中对其进行微调。
电子的
控制器板组件包括伺服控制器、IMU 和 DC-DC 转换器模块。通过额外的串行端口,您可以将机器人连接到启用无线控制的无线或蓝牙模块。围绕 ATmega328P 构建,微控制器的性能,IO 不足以满足此类应用。我鼓励您将此原理图作为参考并切换到高性能 32 位微控制器(例如 STM32H7、ESP32)。如果您更喜欢 AVR Arduino 板,请直接使用此设计,它会起作用。
导出的 Gerber 文件也会上传。如果您不想订购 PCB,也可以使用现成的组件(Arduino nano、MPU 6050、dc-dc 转换器等)来制作。
控制器板引脚分配
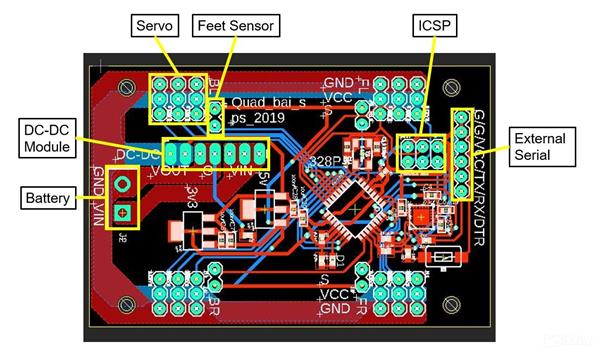
使用 ICSP 上传固件并使用外部串口进行调试。硬件IIC引脚(A4,A5)被IMU占用(MPU6050也是一个'老芯片',你可以用BNO080之类的东西代替)。
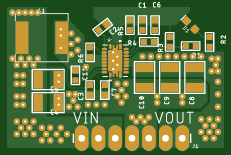
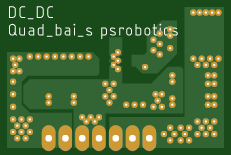
DC-DC转换器
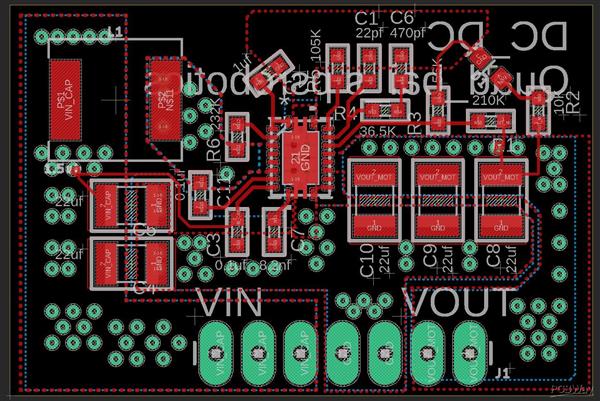
集成升压转换器为伺服系统供电。预配置的输出电压为 5.5V,您可以通过 [替换]() 反馈电阻进行更改。将此模块插入控制器板上的 DC-DC 插槽。
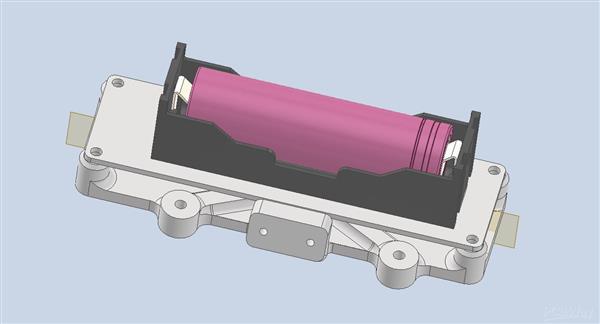
电池
优先选择具有大电流输出能力(>10A)的单节锂电池。本项目使用18650、18350电池。[电池架](硬件/步骤)可以打印并安装在机器人框架下。
模拟
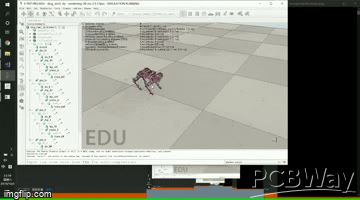
固件
实现了一个简化的控制器来生成行走的小跑模式。在这里,我应用了一个状态机来轻松同步一组开放的脚轨迹(带有脚传感器)。IMU 单元用于在站立阶段调整身体侧倾和俯仰。请注意,此机器人仅在运动学层面上进行控制,不要指望它在行走过程中抵抗外部冲击。
本项目不提供任何保证,构建风险自负。
代码
STL、PCB 和固件
https://github.com/psrobotics/Quadruped_bai_servo
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 开源低成本电力监控系统
- Robobug六足动物行走和跟随障碍物开源硬件
- 低成本机器人消毒系统开源分享
- 低成本无线火箭发射器开源分享
- 迈尔斯开源四足蜘蛛机器人
- ESP32低成本板开源项目
- 一种低成本、低功耗的WiFi6181 20次下载
- 仿生液压四足机器人伺服控制器设计资料下载
- LCD的显示原理及低成本驱动方法资料下载
- 低成本高性能的新一代高压功率MOSFET 33次下载
- 高性能低成本的蓝牙模块CSR6576原理图 16次下载
- 低成本的医疗检测与监测方案 8次下载
- 基于ADAMS的四足仿生机器人单腿结构设计 3次下载
- 开关电源设计12秘籍高效低成本的解决方案 5次下载
- 低成本LCD驱动控制的ASIC实现方案
- 如何提高伺服驱动器的效率 449次阅读
- 伺服驱动器和伺服控制系统的区别 1024次阅读
- 伺服驱动器和伺服电机的区别 2877次阅读
- 伺服放大器和伺服驱动器的区别 2189次阅读
- 伺服驱动器和伺服控制器的区别 2338次阅读
- 伺服电机驱动器设置参数教程 7586次阅读
- 伺服驱动器的常见故障和处理方法 4384次阅读
- 伺服驱动器的工作原理_伺服驱动器内部结构 5.3w次阅读
- 伺服驱动器如何接线_伺服驱动器接线图 11.4w次阅读
- 伺服驱动器故障代码 5.4w次阅读
- 伺服驱动器怎样维修_伺服驱动器维修技巧 2w次阅读
- 伺服驱动器原理_伺服驱动器的作用 1.4w次阅读
- 伺服驱动器的工作模式与伺服驱动器的测试方法 1.2w次阅读
- 什么是伺服驱动系统?伺服驱动系统的基本概念及其组成分类 1.8w次阅读
- 基于赛灵思FPGA的低成本MIPI接口IP 1.7w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1HACD1204QN型低抖动LVDS时钟缓冲器
- 0.45 MB | 3次下载 | 免费
- 2HBS2268 PWM的电流型开关电源控制器中文手册
- 1.47 MB | 3次下载 | 免费
- 3MLS3535A单通道高压线性LED恒流驱动器中文手册
- 0.74 MB | 1次下载 | 免费
- 4TL431系列可调精密并联稳压器规格书
- 359.48KB | 1次下载 | 免费
- 5SOD80C玻璃、全密封玻璃表面贴装封装规格书
- 126.34KB | 1次下载 | 免费
- 6隔离电源方案电路框架图
- 8.42 MB | 1次下载 | 1 积分
- 7HAC946QN型高速时钟缓冲器
- 0.54 MB | 1次下载 | 免费
- 8大彩VisualTFT智能家居UI案例
- 14.60 MB | 1次下载 | 免费
本月
- 1A7159和A7139射频芯片的资料免费下载
- 0.20 MB | 55次下载 | 5 积分
- 2DeepSeek:从入门到精通
- 5.36 MB | 48次下载 | 1 积分
- 3零死角玩转STM32F103—指南者
- 26.78 MB | 44次下载 | 1 积分
- 4PIC12F629/675 数据手册免费下载
- 2.38 MB | 36次下载 | 5 积分
- 5PIC16F716 数据手册免费下载
- 2.35 MB | 18次下载 | 5 积分
- 6dsPIC33EDV64MC205电机控制开发板用户指南
- 5.78MB | 8次下载 | 免费
- 7STC15系列常用寄存器汇总免费下载
- 1.60 MB | 7次下载 | 5 积分
- 8几款格力空调电路图
- 0.88 MB | 6次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935124次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420063次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233088次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191367次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183335次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81582次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73813次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65988次下载 | 10 积分





 工商网监
工商网监
评论