 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
今天,你几乎不会让任何人感到惊讶,因为你的手机配备了摄像头、无线小工具和其他技术进步。多亏了 Arduino 平台,数百万人发现了电子和编程的美妙世界。关于如何通过蓝牙在手机和 Arduino 之间交换数据的 100、500 条指令被写...我在说什么?是的。我想通过蓝牙在 Android 上的手机和 Arduino UNO 之间交换数据 100、501 次。但我想传输的不仅仅是一组字符和数字,而是图片。
有人会说这是不可能的,Arduino 速度太慢,无法快速处理大量数据。他将是绝对正确的。如果对 Arduino 有一点帮助 - 将所有“艰苦”的工作转移到其他设备的肩上呢?并且有这样的设备!
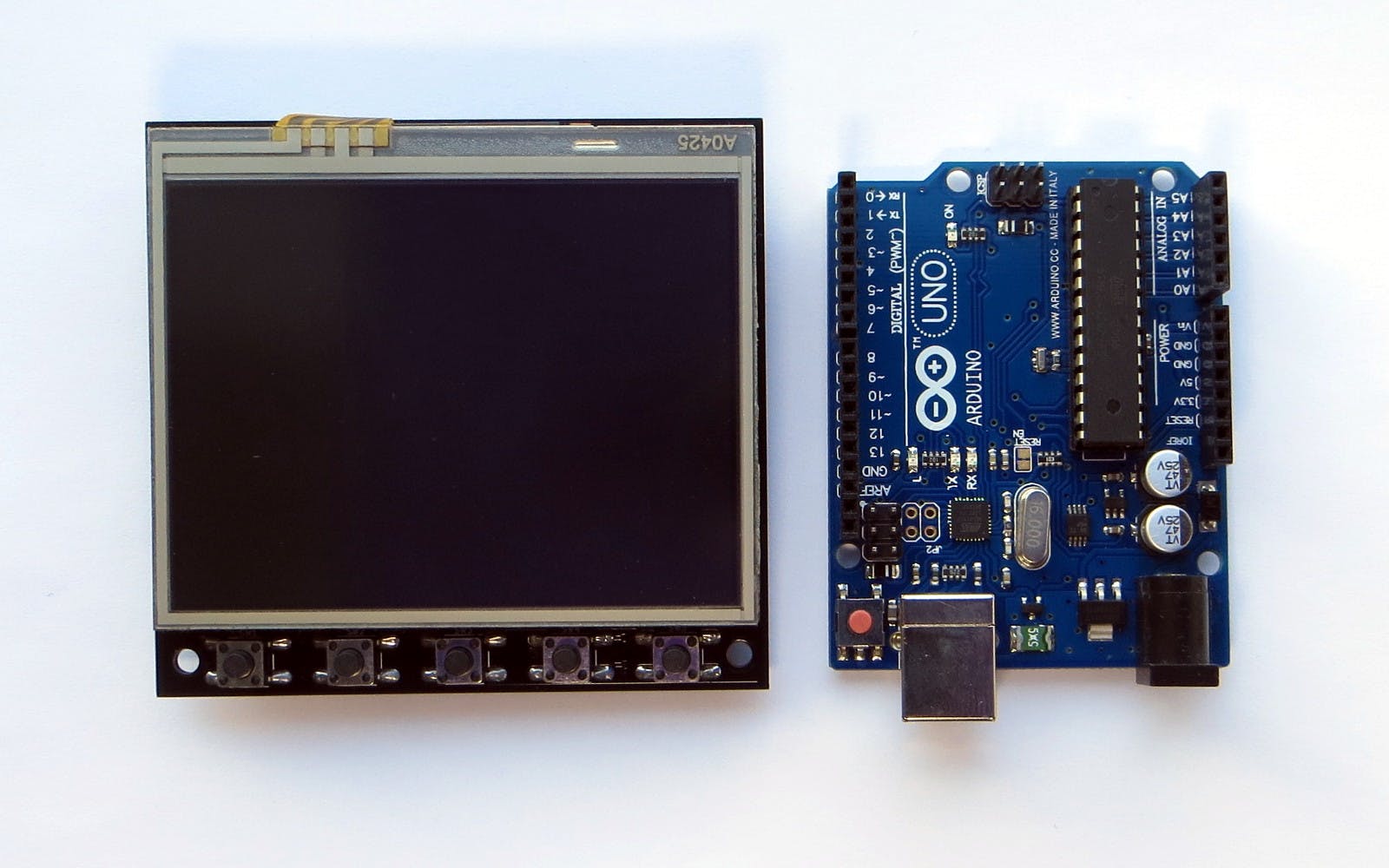
这是 Arduino 独特的 TFT 屏蔽。有关此徽标的信息在以下文章中:文章 1 ,文章 2在本教程中,我将演示如何通过蓝牙连接 Arduino 和 Android 手机,从 Arduino UNO 上的 OV7670 摄像头获取照片并将其传输到 Android 手机。然后,相反,将图片(来自相机的图像)从 Android 手机传输到 Arduino UNO 并显示在独特的 TFT 屏蔽的屏幕上。
为 Android 手机编写了一个特殊的应用程序。
TFT屏蔽的简要特点:
- 尺寸 3.5 英寸对角线,
- 分辨率 320x240,
- 颜色数 65536(16 位),
- 5个按钮,
- 用于连接 micro SD 卡的插槽,
- 4 针 (2.54 mm) 连接器,用于连接蓝牙模块 HC-05 (-06)、ESP8286 WiFi 模块。
- 用于相机 (OV7670) 的 20 针 (2.54 mm) 连接器。
所需组件列表

硬件:
- 安卓手机。
注意:必须(!)使用 6-12 伏电源适配器来操作 TFT 屏蔽,因为 USB 的 500 mA 的最大电流不足以正常操作。
软件:
准备中
软件
所有演示草图都是在 Arduino IDE 环境中编写的,因此一开始需要安装 Arduino IDE - https://www.arduino.cc/en/main/software。然后你需要为 TFT shield 安装一个库 - github.com/YATFT/YATFT (下载该库并解压到 Arduino IDE 目录下的“libraries”文件夹中)。
安装 Arduino IDE 后,您必须对 Arduino UNO 板进行编程。为简单起见,我建议单独刷机,不带 TFT 屏蔽。为了这:
- 将 USB 线连接到 Arduino UNO 板;
- 在电脑上运行 Arduino IDE;
- 选择Arduino UNO所连接的对应端口;
- 下载ArduinoBluetoothCamera.ino演示草图(和文件ov7670_regs.h用于相机初始化);
- 单击按钮上传。
如果 Arduino UNO 板编程成功,您可以继续下一步。
ArduinoBluetoothCamera.ino草图:
/**********************************************************************
* SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF
* ANY KIND, EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY
* WARRANTY OF MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A
* PARTICULAR PURPOSE. IN NO EVENT SHALL AUTHOR OR ITS LICENSORS BE
* LIABLE OR OBLIGATED UNDER CONTRACT, NEGLIGENCE, STRICT LIABILITY,
* CONTRIBUTION, BREACH OF WARRANTY, OR OTHER LEGAL EQUITABLE THEORY ANY
* DIRECT OR INDIRECT DAMAGES OR EXPENSES INCLUDING BUT NOT LIMITED TO
* ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR CONSEQUENTIAL DAMAGES,
* LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF SUBSTITUTE GOODS,
* TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES (INCLUDING BUT
* NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
***********************************************************************/
#include
#include
#include
#include
#include "ov7670_regs.h"
JPEG_DECODE jpeg_decode;
YATFT tft(0);
INTRFC ifc;
CAM cam;
CODEC codec;
SRL srl;
#define IMG_SizeX 320
#define IMG_SizeY 240
uint8_t mode = 0;
uint8_t last_mode = 0;
uint8_t start_capt = 0;
uint16_t err;
void setup()
{
// initialize the serial port
Serial.begin(115200);
// initialize the display
tft.begin();
tft.SetColor(BRIGHTRED);
tft.ClearDevice();
}
void loop()
{
// put your main code here, to run repeatedly:
if (Serial.available())
{
uint8_t temp = Serial.read();
switch (temp)
{
case 0x10: // Send single Photo
mode = 1;
start_capt = 1;
if (last_mode != mode && last_mode != 2) {
tft.begin();
tft.SetRGB(); // Switch to RGB mode
cam.CamInit(&OV7670_QVGA[0][0]);
cam.CamVideoPreview(0, 0, 1, true);
codec.JPEGInit();
codec.JPEGSetRegs(IMG_SizeX, IMG_SizeY);
delay(1000);
}
break;
case 0x20: // Continuous send Photo
mode = 2;
start_capt = 2;
if (last_mode != mode && last_mode != 1) {
tft.begin();
tft.SetRGB(); // Switch to RGB mode
cam.CamInit(&OV7670_QVGA[0][0]);
cam.CamVideoPreview(0, 0, 1, true);
codec.JPEGInit();
codec.JPEGSetRegs(IMG_SizeX, IMG_SizeY);
}
break;
case 0x30: // Receive single Photo
mode = 3;
start_capt = 3;
if (last_mode != mode && last_mode != 4) {
tft.begin();
tft.SetYUV(); // Switch to YUV mode
}
break;
case 0x40: // Continuous receive Photo
mode = 4;
start_capt = 4;
if (last_mode != mode && last_mode != 3) {
tft.begin();
tft.SetYUV(); // Switch to YUV mode
}
break;
default:
break;
}
}
if (mode == 1) // Send single Photo
{
if (start_capt == 1)
{
start_capt = 0;
last_mode = mode;
mode = 0;
CamCapture();
}
}
else if (mode == 2) // Continuous send Photo
{
while (1)
{
uint8_t temp = Serial.read();
if (start_capt == 2)
{
start_capt = 0;
}
if (temp == 0x21) // Stop ?
{
start_capt = 0;
last_mode = mode;
mode = 0;
break;
}
if (CamCapture()) continue;
}
}
else if (mode == 3) // Receive single Photo
{
if (start_capt == 3)
{
//Start capture
start_capt = 0;
last_mode = mode;
mode = 0;
Serial.print("!");
srl.JPEGReadFromSerial(&jpeg_decode, // jpeg decode structure
0, // x0 (left)
0, // y0 (top)
GetMaxX()+1, // x1 (right)
GetMaxY()+1, // y1 (bottom)
32000); // max image size
}
}
else if (mode == 4) // Continuous receive Photo
{
uint8_t temp = Serial.read();
while (1)
{
if (start_capt == 4)
{
//Start capture
start_capt = 0;
}
if (temp == 0x41) // Stop ?
{
start_capt = 0;
last_mode = mode;
mode = 0;
break;
}
Serial.print("!");
srl.JPEGReadFromSerial(&jpeg_decode, // jpeg decode structure
0, // x0 (left)
0, // y0 (top)
GetMaxX()+1, // x1 (right)
GetMaxY()+1, // y1 (bottom)
32000); // max image size
}
}
}
uint8_t CamCapture(void)
{
uint8_t temp = 0xff, temp_last = 0;
bool is_header = false;
uint32_t length = 0;
length = codec.JPEGStart();
uint32_t en_jpeg_address = ifc.rdReg32(0x414)<<2;
int k = 0;
if ((length >= 0x5FFFF) | (length == 0))
{
start_capt = 2;
return 1;
}
temp = ifc.GetMem(en_jpeg_address+k);
k++;
length --;
while ( length-- )
{
temp_last = temp;
temp = ifc.GetMem(en_jpeg_address+k);
k++;
if (is_header == true)
{
Serial.write(temp);
}
else if ((temp == 0xD8) & (temp_last == 0xFF))
{
is_header = true;
Serial.write(temp_last);
Serial.write(temp);
}
if ( (temp == 0xD9) && (temp_last == 0xFF) ) //If find the end ,break while,
break;
}
is_header = false;
return 0;
}
OV7670_regs.h:
#ifndef OV7670_REGS_H
#define OV7670_REGS_H
const uint8_t OV7670_VGA[][2] PROGMEM =
{
{ 1, 0x42}, // Size of byte, Address (ID)
{ 640/16, 480/16}, // Size X, Size Y
{0b01000010, 0b00000100}, // Reset_Enable_N, 7|6|5|4|3|Vsync Invert|Hsync Invert|0
{0x3a, 0x0C}, {0x40, 0xC0}, {0x12, 0x00}, {0x0c, 0x00},
{0x3e, 0x00}, {0x70, 0x3A}, {0x71, 0x35}, {0x72, 0x11},
{0x73, 0xF0}, {0xa2, 0x02}, {0x11, 0x80}, {0x7a, 0x18},
{0x7b, 0x02}, {0x7c, 0x07}, {0x7d, 0x1F}, {0x7e, 0x49},
{0x7f, 0x5A}, {0x80, 0x6A}, {0x81, 0x79}, {0x82, 0x87},
{0x83, 0x94}, {0x84, 0x9F}, {0x85, 0xAF}, {0x86, 0xBB},
{0x87, 0xCF}, {0x88, 0xEE}, {0x89, 0xEE}, {0x13, 0xE0},
{0x00, 0x00}, {0x10, 0x00}, {0x0d, 0x00}, {0x24, 0x98},
{0x25, 0x63}, {0x26, 0xD3}, {0x2a, 0x00}, {0x2b, 0x00},
{0x2d, 0x00}, {0x13, 0xe5}, {0x13, 0xe7}, {0x1e, 0x30},
{0x74, 0x60}, {0x01, 0x80}, {0x02, 0x80}, {0x15, 0x10},
{0x4f, 0x40}, {0x50, 0x34}, {0x51, 0x0C}, {0x52, 0x17},
{0x53, 0x29}, {0x54, 0x40}, {0x57, 0x80}, {0x58, 0x1e},
{0x41, 0x10}, {0x75, 0x60}, {0x76, 0x50}, {0x77, 0x48},
{0x3d, 0x92}, {0x3b, 0x00}, {0x04, 0x00}, {0xff, 0xff},
};
const uint8_t OV7670_QVGA[][2] PROGMEM =
{
{ 1, 0x42}, // Size of byte, Address (ID)
{ 320/16, 240/16}, // Size X, Size Y
{0b01000010, 0b00000100}, // Reset_Enable_N, 7|6|5|4|3|Vsync Invert|Hsync Invert|0
{0x3a, 0x0C}, {0x40, 0xC0}, {0x12, 0x10}, {0x0c, 0x00},
{0x3e, 0x00}, {0x70, 0x3A}, {0x71, 0x35}, {0x72, 0x11},
{0x73, 0xF0}, {0xa2, 0x02}, {0x11, 0x80}, {0x7a, 0x18},
{0x7b, 0x02}, {0x7c, 0x07}, {0x7d, 0x1F}, {0x7e, 0x49},
{0x7f, 0x5A}, {0x80, 0x6A}, {0x81, 0x79}, {0x82, 0x87},
{0x83, 0x94}, {0x84, 0x9F}, {0x85, 0xAF}, {0x86, 0xBB},
{0x87, 0xCF}, {0x88, 0xEE}, {0x89, 0xEE}, {0x13, 0xE0},
{0x00, 0x00}, {0x10, 0x00}, {0x0d, 0x00}, {0x24, 0x98},
{0x25, 0x63}, {0x26, 0xD3}, {0x2a, 0x00}, {0x2b, 0x00},
{0x2d, 0x00}, {0x13, 0xe5}, {0x13, 0xe7}, {0x1e, 0x30},
{0x74, 0x60}, {0x01, 0x80}, {0x02, 0x80}, {0x15, 0x10},
{0x4f, 0x40}, {0x50, 0x34}, {0x51, 0x0C}, {0x52, 0x17},
{0x53, 0x29}, {0x54, 0x40}, {0x57, 0x80}, {0x58, 0x1e},
{0x41, 0x10}, {0x75, 0x60}, {0x76, 0x50}, {0x77, 0x48},
{0x3d, 0x92}, {0x3b, 0x00}, {0x04, 0x00}, {0xff, 0xff},
};
#endif
安卓
在 Android 手机上,您需要安装ArduinoTFT.apk。允许应用使用蓝牙和相机。
2020 年 5 月 26 日更新!
我添加了 ArduinoTFT.apk 的源代码。原样!下载ArduinoTFT.zip.h
,重命名为ArduinoTFT.zip 并解压。享受!
2020 年 7 月 25 日更新!
“嗨,我遇到了同样的问题,Android 应用程序无法正常工作。授权应用程序访问智能手机相机后解决。就是这样。再见”(c)
蓝牙模块
需要在蓝牙模块中设置汇率为115200(命令“AT+UART=115200, 0, 0”)。这是 Arduino UNO 管理接收和处理数据的最佳速度。(理论上可以提高速度,优化数据接收和处理,但这需要更大的RAM)。关于如何设置汇率的更详细说明可以在网上找到,例如,这里:https:/ /www.instructables.com/id/Communication-Bluetooth-Module-With-HC-05-HC-06/ 。
(!)请注意蓝牙模块连接到 Arduino UNO 的调试端口。因此,在使用蓝牙时,调试端口不可用。并且在对 Arduino UNO(配有蓝牙模块)进行编程之前,必须断开蓝牙模块。编程后,将其重新设置(!)
集会
该设备的组装非常简单:
- 将 Arduino UNO 和 TFT-shield 连接在一起;
- 将 OV7670 相机连接到屏蔽层 TFT-shield 上的 20 针连接器(有时我使用 2.54 毫米间距的有角度的 18-20 针连接器作为适配器);
- 将蓝牙模块HC-06(HC-05)连接到TFT-shield上带有“蓝牙”字样的4针连接器上;
- 将 6-12V 电源适配器连接到 Arduino UNO 板上的电源输入。
打开电源后,TFT shield 的屏幕应变为红色。这意味着愿意从 Android 手机接收命令。
在安卓手机上执行以下操作:
- 在 Android 手机上启动ArduinoTFT应用程序;
- 将手机置于水平位置;
- 开启蓝牙连接,选择检测到的蓝牙模块(HC-06);
屏幕上应出现两个窗口和四个按钮:
- 右上角窗口是手机的相机取景窗口;
- 左侧大窗口 - 接收或发送的图像。
按钮功能:
- 将单个图像从 Android 手机传输到 Arduino;
- 将图像从 Android 手机连续传输到 Arduino;
- 将单个图像从 Arduino 传输到 Android 手机;
- 将图像从 Arduino 连续传输到 Android 手机。
图像大小为 320x240 像素 (2-5 kB)。本章有一个演示视频。
再一次问好!有一个用于一系列屏幕的更新库,目前由两个屏蔽和两个分线板组成。草图的编译取决于所选版本(从 1 到 4)和微控制器类型(MegaAVR 或 ESP-32)。添加了照片,示例。更多信息可以在https://github.com/Ekaburg/EkaTFT中找到。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 带有Android手机作为摄像头的蓝牙小车 0次下载
- 使用Arduino蓝牙摄像头的安全系统
- labview本地视频及摄像头资料 36次下载
- V380摄像头客户端下载 0次下载
- 基于LABVIEW编程的USB摄像头拍照VI文件 56次下载
- 红外摄像头驱动工具ThermoX软件下载 75次下载
- CCD摄像头的电路原理图免费下载 153次下载
- 如何实现家庭安防系统中的多摄像头和视频采集与网络传送 22次下载
- stm32 摄像头 32次下载
- CCD摄像头 18次下载
- 摄像头入门 0次下载
- MINI摄像头接线图 35次下载
- 微视摄像头驱动下载
- 001摄像头万能驱动下载
- 中星微305摄像头驱动下载
- 用usb摄像头替换手机前置摄像头可以吗 3061次阅读
- AHD摄像头与CVBS的区别 1.5w次阅读
- 技术前沿:摄像头模组 5445次阅读
- 摄像头应用领域及应用产品型号 1745次阅读
- 汽车摄像头链接技术挑战和解决方案 1187次阅读
- 如何正确的安装监控摄像头 1.3w次阅读
- fireflyAIO-3399J摄像头模组简介 2040次阅读
- fireflyAIO-3288C主板摄像头模组简介 2202次阅读
- 为什么智能摄像头这么受欢迎 4813次阅读
- FireflyRK3288的摄像头模组介绍 2432次阅读
- 关于Firefly摄像头模组的简介 3347次阅读
- 如何使用luvcview来实现UVC双摄像头拍摄 1w次阅读
- 双摄像头的手机有哪些?双摄像头的手机推荐 2.5w次阅读
- 摄像头芯片型号有哪些_摄像头芯片型号汇总 5.9w次阅读
- 双摄像头系列原理 6736次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论