 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
myCobot 是Elephant Robotics的 6 自由度机械臂,在协作机械臂中拥有最高的性价比。本文是关于使用myCobot280-M5Stack 的体验。我将使用python对其进行编程,包括环境构建、代码测试和开发。
介绍
顾名思义,这个机器人使用 M5Stack 控制器。所以在使用的时候,我们需要用电脑搭建编译环境,我会用python语言来做。有一个名为 pymycobot 的官方库,我将在 python 中使用它来操作机械臂。
环境建设
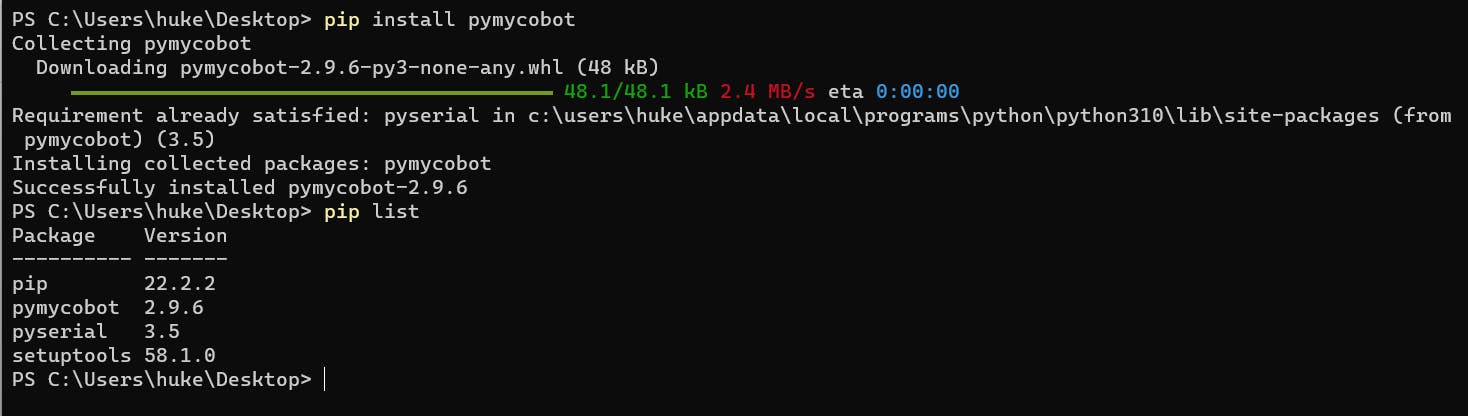
电脑上安装python环境,下载pymycobot库。提供了两种方法:
- Elephant Robotics Gitbook上提供了有关构建 python 环境的更详细的教程。
-
在谷歌上搜索相关教程。安装好编程环境后,我们下载驱动库。
pip install pymycobot
控制机械臂
开始导入一些 python 库。
from pymycobot.mycobot import MyCobot
import time
(1)MyCobot(端口、波特率)
创建一个与 myCobot 通信的对象。端口:机械臂的串行端口。波特:机械臂的波特率。
#The serial port of my arm is COM7, baud rate 115200.
mc = MyCobot('COM7',115200)
(2)get_angles()
获取myCobot所有关节的角度数据。返回值:返回值是一个包含六个数据元素的列表,对应关节1到6。
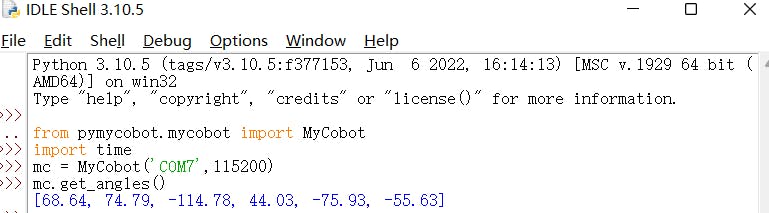
如图所示,我们可以看到 myCobot 的角度

(3)send_angles(度数,速度)
将运动的角度和速度发送到所有关节。度数:关节的角度在-180到180的范围内,分别按照1到6个关节的顺序存储在一个列表中。速度:机械臂运动到指定角度时的速度。mc.send_angles([0,0,0,0,0,0],50)像这样跑。
(4)send_angle(ID, DEGREE, SPEED)
将角度和速度发送到单个关节。Id : 1 到 6 范围内的整数,分别对应 1-6 轴的机械臂。度数:关节的角度在-180到180的范围内,分别按照1到6个关节的顺序存储在一个列表中。速度:机械臂运动到指定角度时的速度。以 50 的速度使关节运动达到 90 度的位置。mc.send_angle(1,90,50)
(5) release_all_servos()
解锁机械臂,使其可以随意手动摆动。注意,执行这个命令时,手臂会因为重力而下落,所以要小心防止它撞到其他东西。mc.release_all_servos()机械臂被控制时通电,通过这个功能,我们可以摆动机械臂。
演示
编写一个演示,让 myCobot280-M5Stack 跳舞。
#!/usr/bin/python3
#-*- coding: UTF-8 -*-
from pymycobot.mycobot import MyCobot
import time
mc = MyCobot('COM7',115200)
mc.send_angles([0,0,0,0,0,0],50)
time.sleep(1)
for count in range(3):
mc.send_angles([87.8,(-51.5),60.9,11.95,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([87.97,42.01,(-45.26),10.37,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
for count2 in range(4):
mc.send_angles([43.24,93.42,(-140.88),48.07,60.64,(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
myCobot280-M5Stack 第一次体验到此结束。如果你喜欢这篇文章,请给我一个赞或发表评论以支持它。谢谢!
- 基于M5Stick-V和M5Stack的办公桌机器人助手
- StickC M5Stack LED闪烁
- M5Stack圣诞雪球开源分享
- 带有M5Stack和Edge Impulse的手势控制无人机
- 带M5Stack的工厂监控系统
- M5Stack智能植物浇水开源项目
- Bareboat Necessities的M5Stack坚韧Arduino船展示
- 基于M5Stack的PID控制学习平台
- 基于M5Stack的抗COVID安全门
- 带M5Stack的音频频谱显示
- 配备M5Stack的智能工厂
- 使用M5StickC Plus进行M5Stack圣诞节的圣诞老人追踪器
- 用M5Stack设备装饰圣诞树
- 用于M5Stack的Arduino大型国际象棋
- 带有M5Stack的电报控制无人机
- 使用myCobot 280机械臂结合ROS2系统搭建机械分拣站 89次阅读
- 在Mac上使用Docker构建noVNC环境并运行MyCobot 81次阅读
- 一款基于树莓派CM4的小型Arm Linux迷你电脑 2591次阅读
- M5Stack IOT智能门禁系统–基础篇(Blockly+MQTT) 3611次阅读
- dfrobotDFRduino Pro Mini控制器简介 2200次阅读
- 新唐科技M031FB0AE控制器 2943次阅读
- 新唐科技M032KG6AE控制器介绍 1901次阅读
- 新唐科技M031KG8AE控制器 1866次阅读
- 新唐科技N567G280控制器介绍 1156次阅读
- 新唐科技M031SD2AE控制器简介 2093次阅读
- 新唐科技M031SE3AE控制器介绍 2175次阅读
- 新唐科技N567H280控制器介绍 1720次阅读
- 新唐科技N567K280控制器介绍 1708次阅读
- 基于M2M的大型工程类装备的智能控制器设计 1945次阅读
- 温度控制器电路图5 2817次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论