 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
在上一篇文章中,您了解了使用 Arduino 的基于 RFID 和键盘的门锁和警报系统,其中用户必须扫描正确的标签并输入正确的密码才能打开门锁,系统还会向我们发送确认消息。
在这篇文章中,您将了解如何使用 Arduino 构建基于 RFID 的访问控制系统。系统只允许扫描正确的标签和扫描错误的标签,系统将拒绝访问,并且蜂鸣器会发出哔哔声。将有一个主标签用于添加/删除其他标签。
模块断电后保存的标签仍会保留。重置系统的唯一方法是使用擦除按钮,该按钮将擦除 EEPROM 中的所有数据。EEPROM 大约有 100, 000 个有限的写入周期。
这是 RFID Arduino 系列的第四篇文章。RFID Arduino系列所有文章如下
- RFID 基础知识和与 Arduino 连接的 RFID 模块
- 使用 Arduino 的基于 RFID 和键盘的门锁
- 使用 Arduino 的基于 RFID 和键盘的门锁和警报系统
- 使用 Arduino 的基于 RFID 的访问控制系统
- 使用 Arduino 的基于 RFID 的访问控制和警报系统
- 使用 Arduino 的基于 RFID 和键盘的访问控制
- 使用 Arduino 的基于 RFID 和键盘的访问控制和警报系统
使用Arduino的基于RFID的访问控制系统的工作
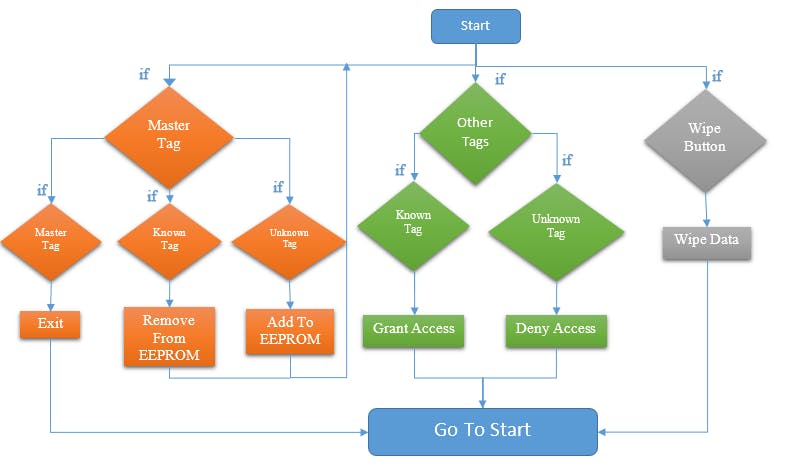
第一次启动项目时,它会要求您定义一个主标签,您将扫描的任何标签都将是您的主标签。主标签将充当程序员,您可以使用它来添加或删除其他标签。
定义主标签后,您必须添加可用于开门的其他标签。为此,请扫描主标签,它将使系统进入程序模式。
在程序模式下,扫描标签将从系统中添加/删除这些标签。扫描您想用来开门的标签,系统会将这些标签的 UID 存储在 EEPROM 中。再次扫描标签以将其从 EEPROM 中移除。要退出编程模式,请扫描主标签。
现在扫描您在系统中添加的标签以打开门,扫描错误的标签时,门将保持关闭状态。
要重置系统,请按 Arduino 的重置按钮,然后长按擦除按钮 10 秒。这将从 EEPROM 中删除所有数据,包括主标签。
电路图及说明
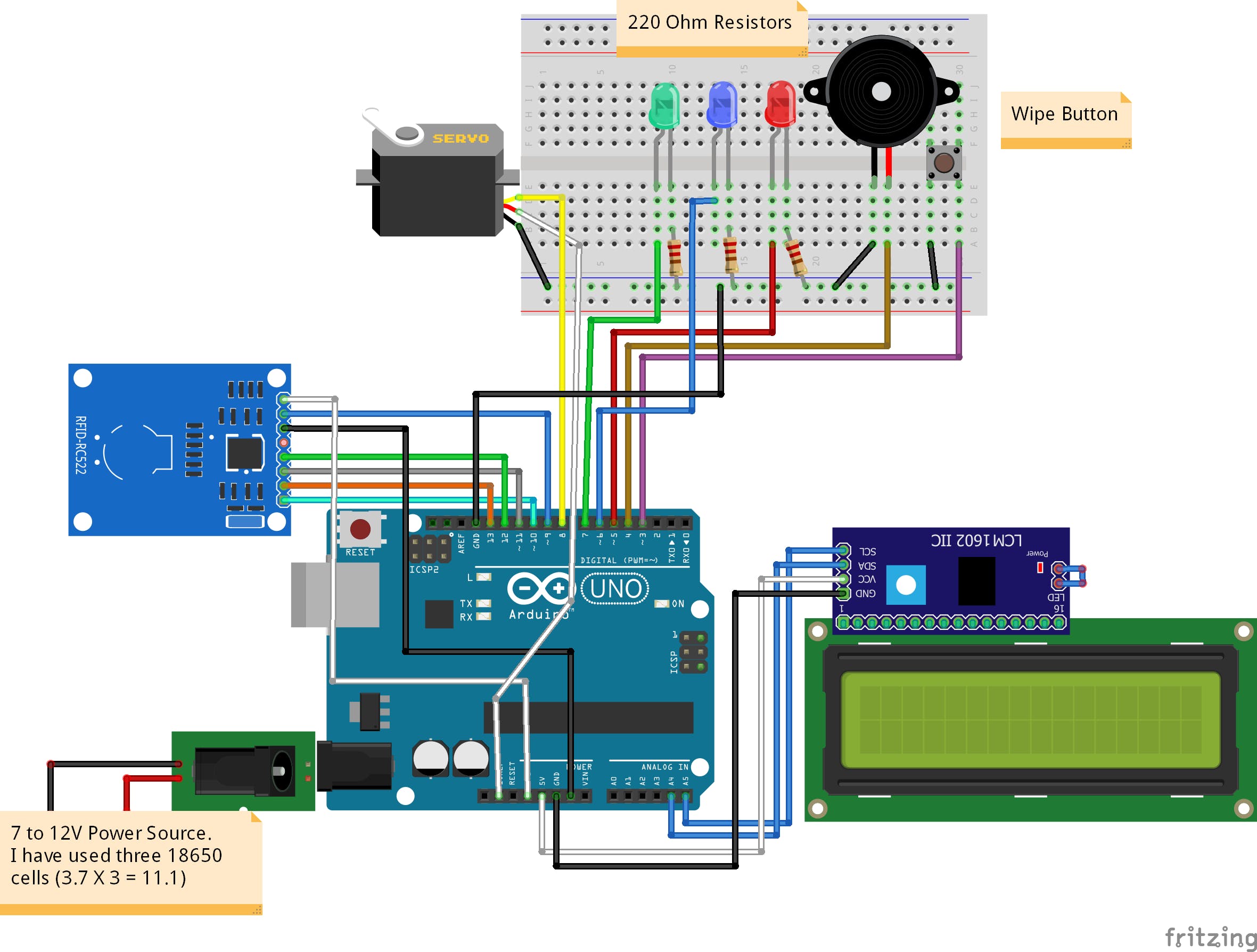
RFID 阅读器通过 SPI 协议与 Arduino 通信,不同的 Arduino 板具有不同的 SPI 引脚。
要测试 RFID 阅读器是否正常工作,请上传 Arduino 中示例中的“dumpinfo”,看看它是否在串行监视器上显示标签的信息。如果您是 RFID 新手,请遵循本教程 | RFID 基础知识和与 Arduino 连接的 RFID 模块
I2C LCD 通过 I2C 协议与 Arduino 通信。不同的 Arduino 板具有不同的 I2C 引脚。Arduino Uno 和 Arduino Nano 上的 I2C 引脚是 A4、A5。
之后,将 Arduino 与伺服、LED、蜂鸣器和按钮连接起来。
最后,将电源连接到 Arduino。我用了三个 18650 电池。我们可以通过筒形千斤顶给 Arduino 提供 6 到 12V 的电压。
使用Arduino的基于RFID的访问控制系统的完整电路图如下
代码
下面的代码是 Miguel Balboa 编写的库中示例草图的修改版本。图书馆的链接如下
https://github.com/miguelbalboa/rfid
使用Arduino的基于RFID的访问控制系统的完整代码如下
#include // We are going to read and write Tag's UIDs from/to EEPROM
#include
- Arduino球和光束控制系统
- 如何制作RFID Arduino门禁系统
- 使用Arduino基于RFID的考勤系统
- 使用Arduino的基于RFID的考勤系统
- 基于RFID的访问控制和监控系统
- 基于RFID的创客空间访问控制系统
- 会说话的RFID自行车控制系统
- 电力拖动自动控制系统之运动控制系统电子版 0次下载
- 基于DSP的摊铺机行驶控制系统 9次下载
- 基于区块链的物联网访问控制系统 45次下载
- DDC控制系统和PLC控制系统对比和应用 12次下载
- 基于XACML访问控制系统设计 4次下载
- 基于Arduino的移动机器人控制系统设计_彭攀来 5次下载
- 基于组件的访问控制系统快速开发方法
- 安全访问控制系统的设计和实现
- 现场总线控制系统与集散控制系统的对比 4.6k次阅读
- 前馈控制系统与反馈控制系统的区别 8.2k次阅读
- 开环控制系统与闭环控制系统的区别 1.6w次阅读
- PLC控制系统与继电器控制系统的比较 5.6k次阅读
- 伺服控制系统与变频控制系统的比较 3.1k次阅读
- plc控制系统与传统继电器控制区别 plc控制系统的优点 6.2k次阅读
- 智能控制系统的主要类型有哪些? 5.7k次阅读
- DCS控制系统是什么?DCS控制系统的特点 5.8k次阅读
- 如何使用Arduino创建停车门禁控制系统? 6.1k次阅读
- 基于 RFID 和 ARM 架构的医疗器械智能控制系统 1.9k次阅读
- 机器人控制系统分类_机器人控制系统有哪些 2.8w次阅读
- 微机控制系统的分类 5.3k次阅读
- PID是控制系统吗?控制系统由什么组成? 1.1w次阅读
- 机器人控制系统概念!机器人控制系统的基本要求 1.1w次阅读
- DCS系统基础知识,DCS控制系统和PLC控制系统,你会怎么选择? 1.9w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费



 工商网监
工商网监
评论