 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
与上一个项目类似,我们将连接一个可以测量距离的传感器,但我们不使用超声波,而是使用波长为 905 nm 的脉冲激光形式的光。与超声波传感器相比,LiDAR-Lite 模块每秒可提供更好的准确度、精度、范围和更多数据样本。LiDAR 系统通常用于自动驾驶汽车、无人机和卫星以绘制地形图。
16x2 字符 LCD
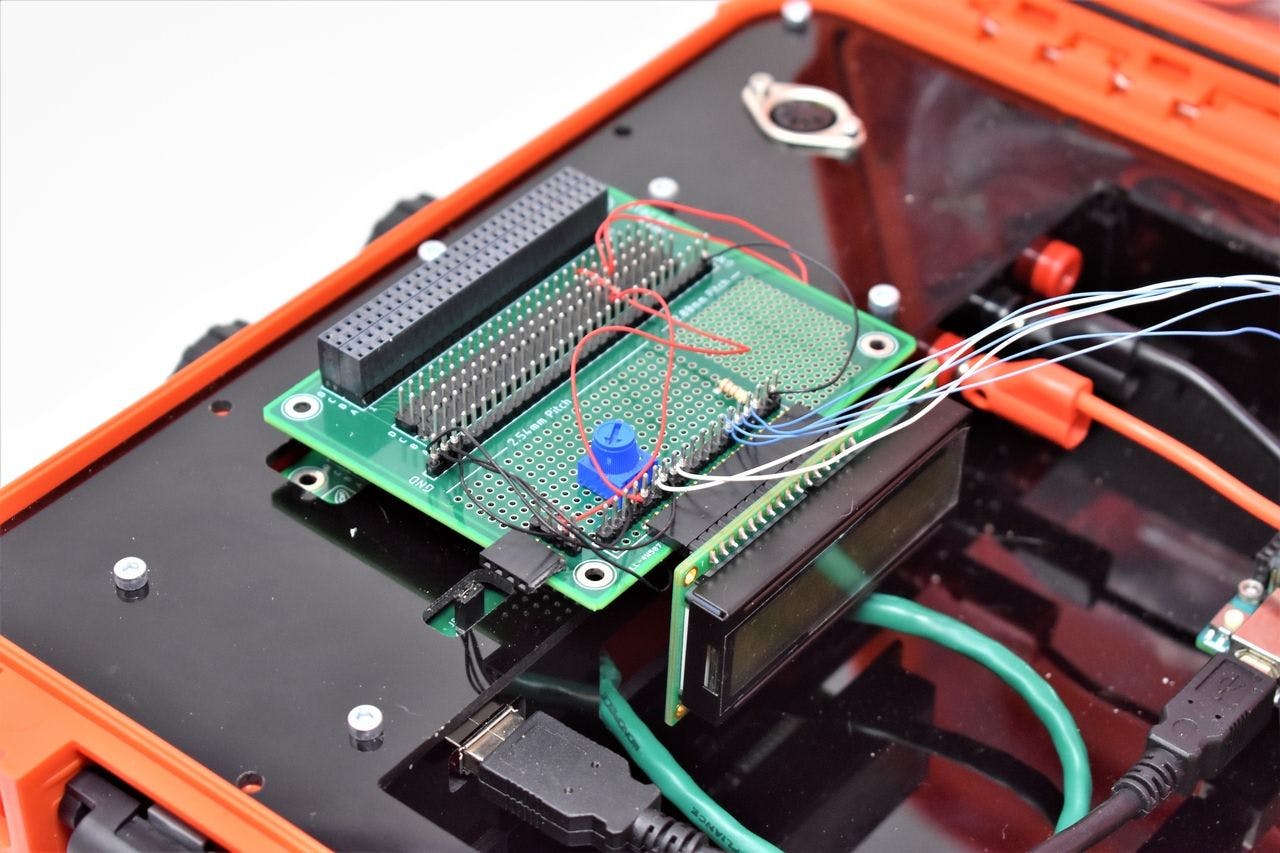
有关如何以 4 位模式连接 16×2 LCD 的更多详细信息,请参见项目 9 。您应该将 LCD 的引脚 4、6 和 11-14 分别连接到 Uno 引脚 2、3 和 4-7。LCD 通过焊接到 1 对 1 链路的 16 针直角母头安装到 Modulus Canister,如下图所示。您也可以使用无焊面包板来安装 LCD。
我们正在将 LiDAR 安装到 Adapticon Canister。如果您也这样做,则必须移除 Modulus 上的 F/M 跳线,并将 30 AWG 线绕到公头针上。这样我们就可以将 Modulus 和 Adapticon 堆叠在一起。
Garmin LiDAR-Lite
LiDAR 代表“光检测和测距”,并通过激光测量距离。激光是一种脉冲光源,其波长范围从紫外线到可见光再到红外线。它们的功率也各不相同——一些是 mW 激光器(指针),而另一些则可能超过 500W(用于切割)。这个特殊的模块有一个工作在 905nm 波长和 1.3 瓦功率的激光器。LiDAR-Lite 发射激光信号并测量激光从目标反射回来后返回所需的时间。一旦获得时间,就可以计算距离,因为我们知道时间和光速。模块进行此计算并通过 I2C 返回到主机的距离。
如果您在 PWM 模式下使用模块,它会返回一个与测量距离成正比的高脉冲宽度。
注意:此模块发射激光辐射,被指定为 1类激光。对于 1 类激光,应采取所有预防措施。
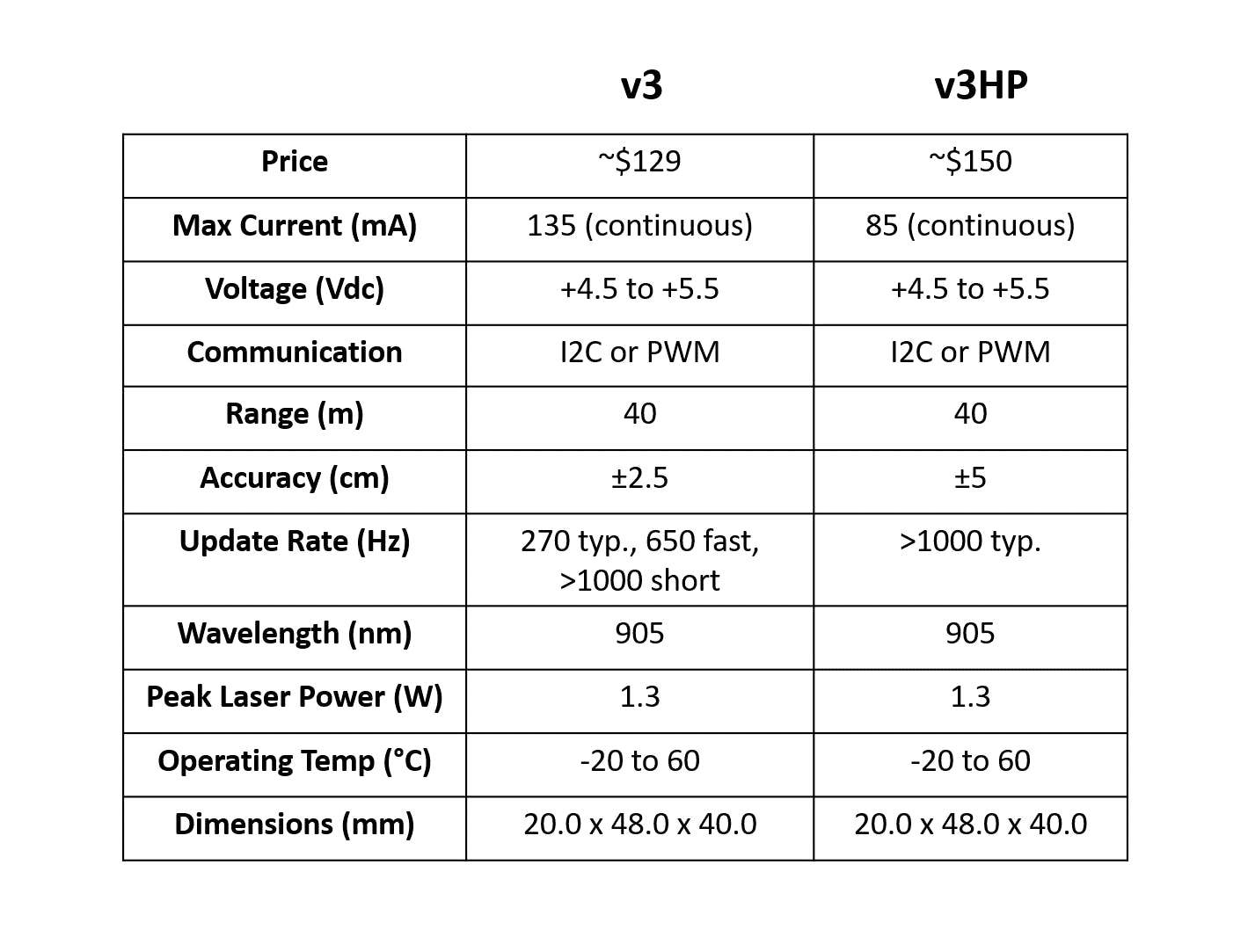
LiDAR-Lite 模块由 6 个引脚组成:+5V、电源 EN、模式控制、I2C SCL、I2C SDA 和 GND。该模块可以在两种模式下运行:I2C(内部集成电路)和 PWM(脉宽调制)。我们将在 I2C 模式下操作模块。Garmin 提供两种型号:LiDAR-Lite v3 和 LiDAR-Lite v3HP。我们使用的是 LiDAR-Lite v3,因为它更便宜。规格表如下所示,Garmin 的完整数据表可在此处找到。
内部集成电路 (I2C)
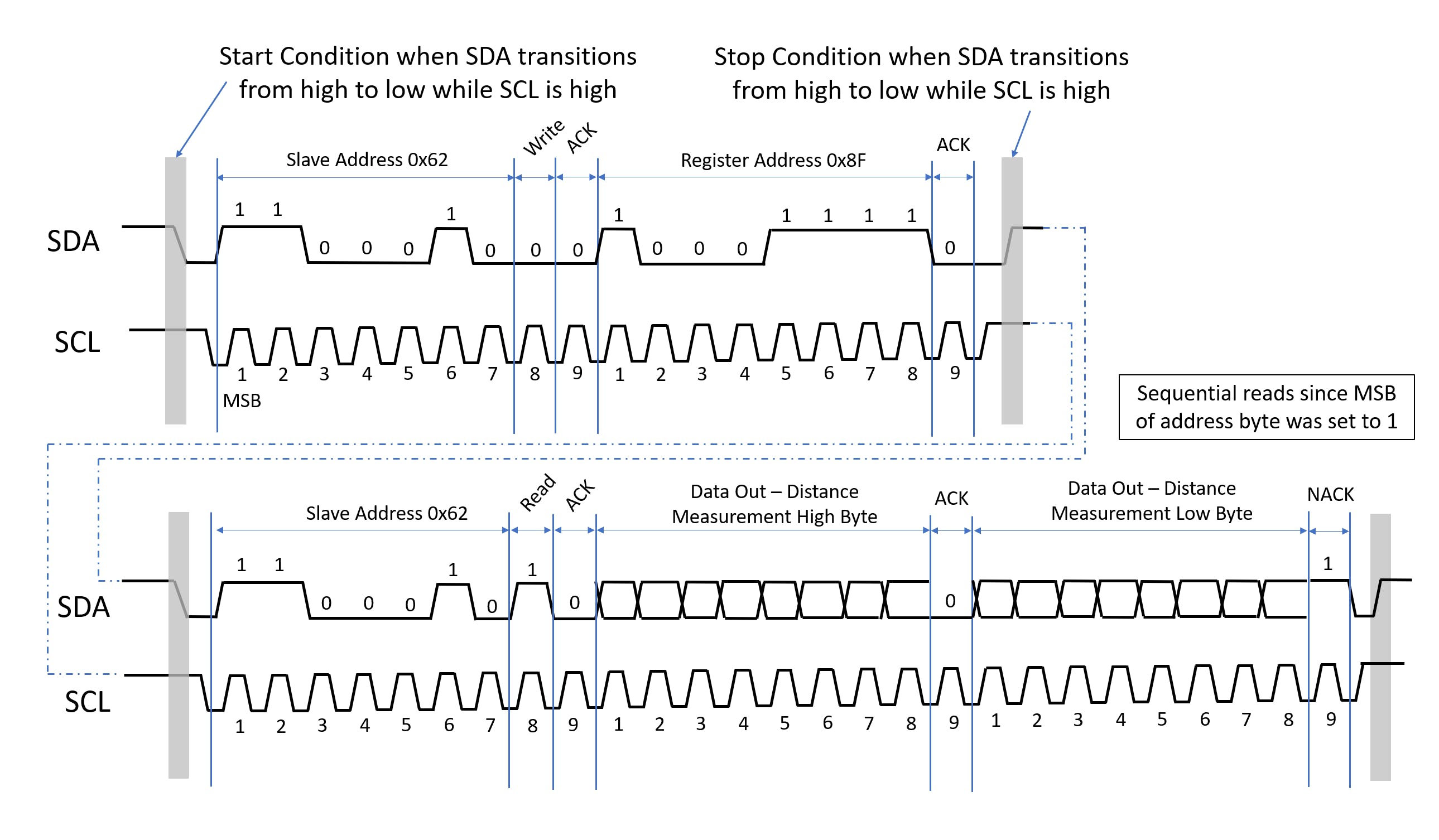
我们将在 I2C 模式下使用该模块。由于我们只使用一个模块,我们不必更改其默认的 7 位从地址,即 0x62。即使我们只有一个从设备,主设备 (Uno) 仍必须将地址发送给它想要与之通信的从设备。除了地址之外,还有一个读/写位告诉从机主机是否要读取或写入它。
从 LiDAR-Lite 获取距离测量值的最简单方法是:
- 主机写入 0x62 来寻址从机并等待从机的确认 (ACK) 位。
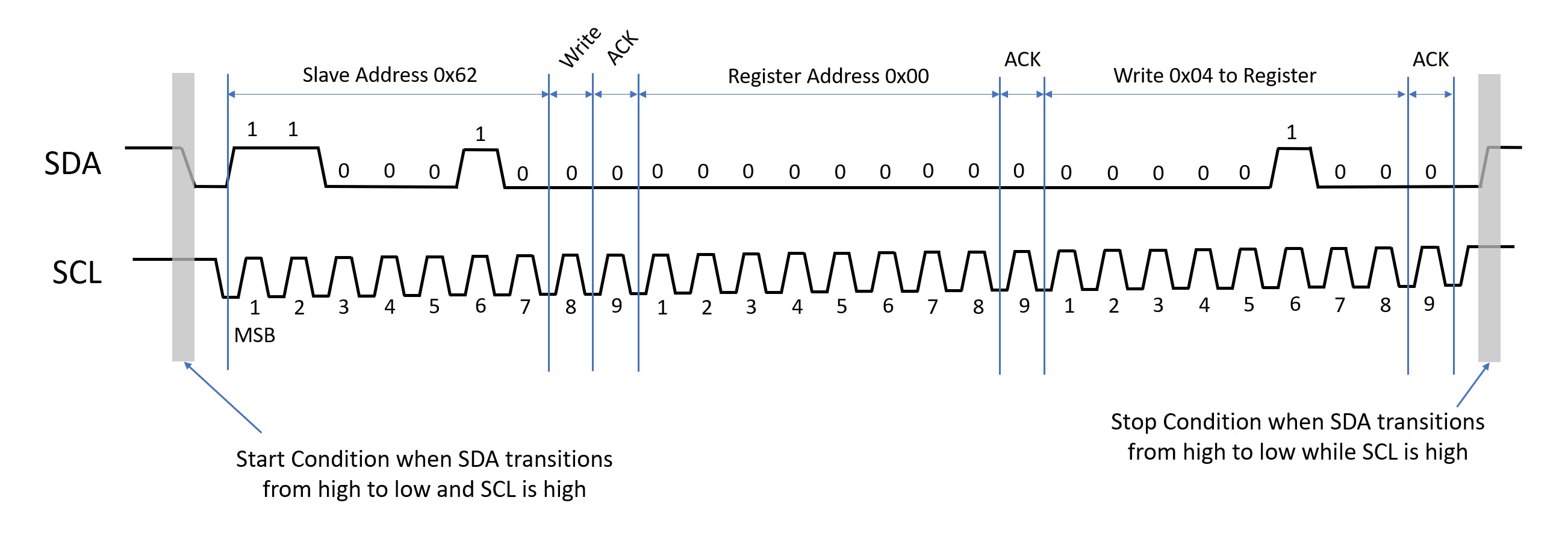
- 主机将 0x04 写入从机寄存器 0x00。LiDAR-Lite 的寄存器 0x00 是Receiver Bias Correction 。将 0x04 写入此寄存器会告诉设备您要使用接收器偏差校正进行距离测量。
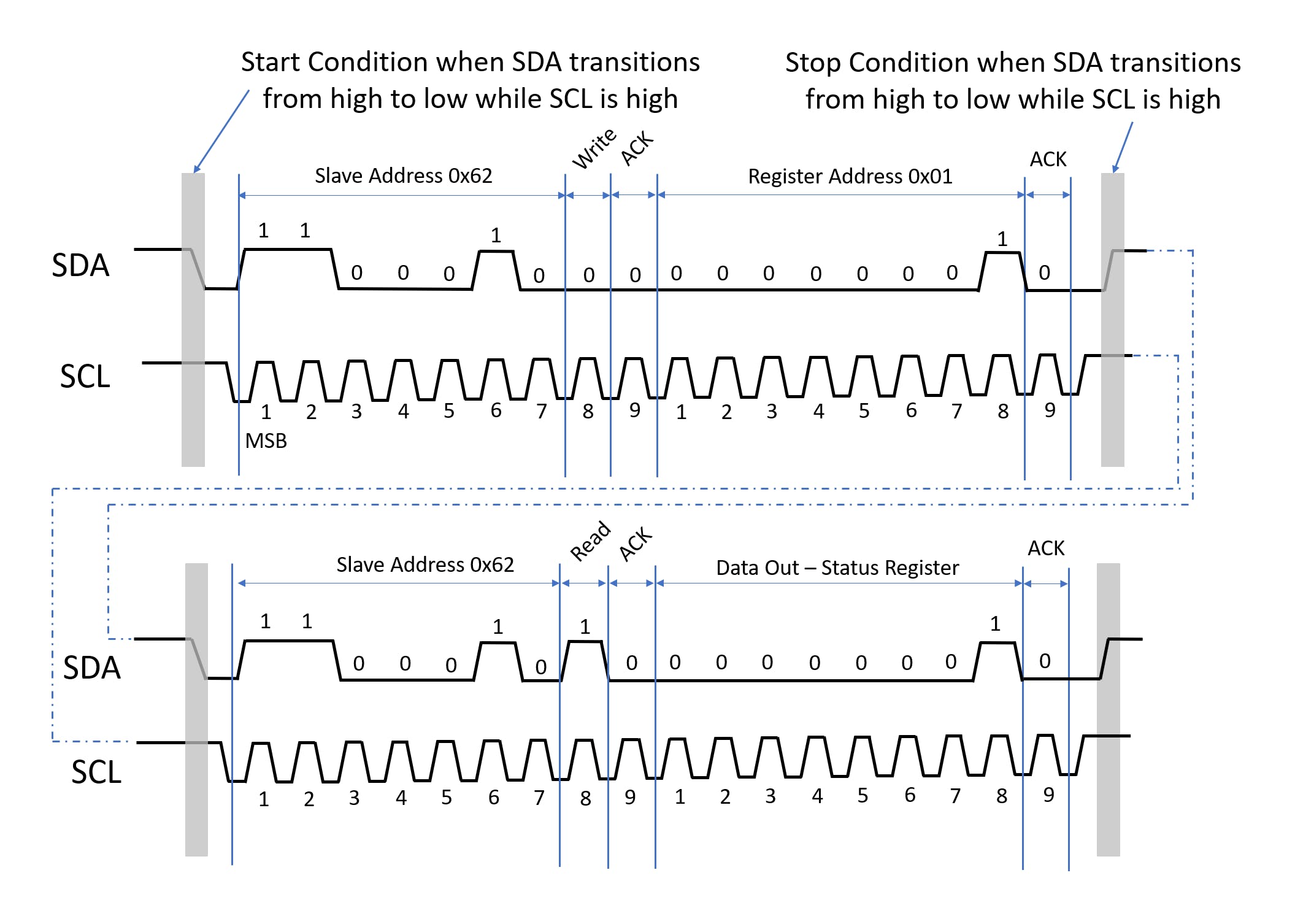
- 主机读取 0x01 寄存器,指示 LiDAR-Lite 的系统状态。如果位 0 (LSB) 为 1,则设备忙。如果它是零,那么我们可以继续获得距离测量值。
- 通过将地址字节的 MSB 设置为 1,我们可以通过连续读取或写入触发寄存器地址的自动递增。我们要读取寄存器 0x0F 中的距离测量的高字节,因此通过将 MSB 设置为 1,该地址变为 0x8F。通过发送 0x8F,主机接收到高字节距离测量和低字节距离测量。
上述步骤的时序图如下所示。
适配图标
我们正在使用 Adapticon 安装 LiDAR-Lite。Adapticon 有安装 Raspberry Pi 3 Model B/B+、Raspberry Pi 4、Raspberry Pi Zero 和 Arduino Uno Rev3 的脚印,因此我们创建了一个适配器板(由 1/8 英寸丙烯酸制成),可安装到 RPi3足迹,以便能够安装 LiDAR-Lite。在将板安装到 Adapticon 之前,我们必须使用四个 #4-40 x 3/8" 内六角螺钉和四个 #4 六角螺母将 LiDAR-Lite 安装到板上。下图显示了 LiDAR-Lite 安装在板上的图像。

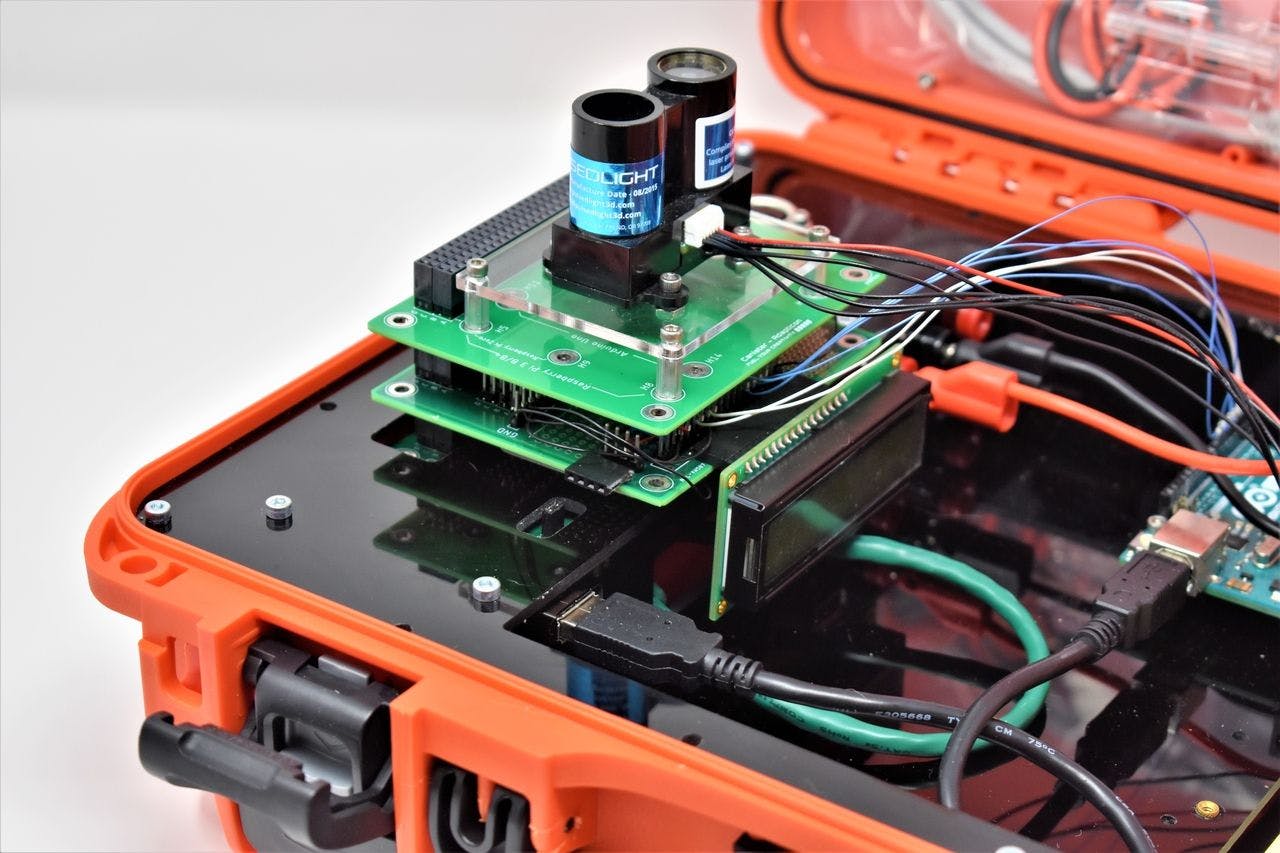
将 LiDAR-Lite 安装到板上后,我们可以使用提供的六角支架和 #4-40 x 1/4" 内六角螺钉将其固定到 Adapticon。最终组装如下所示。

罐堆栈
接下来,我们需要将 Modulus 和 Adapticon 连接在一起。建议您先将 Modulus 连接到 Adapticon(如下图所示),而不是将 Modulus 插入 FuelCan 的 4×26 针连接器,然后再插入 Adapticon。

将两个罐子配对后,小心地将电池组插入 FuelCan 的 4×26 针连接器,然后插入 LiDAR-Lite 的线束,如下图所示。
LiDAR-Lite 接线
线束一侧有一个 JST 母接头,另一侧有剥线端。您可能需要在电线的末端镀锡,这样当您将末端插入面包板时它不会弯曲。将无焊面包板放入底部储物箱中,并将每个剥离端插入面包板上的相邻节点。在模块的引脚 1 和 6(分别为 5Vdc 和 GND)之间放置一个极化的 680uF 电解电容器。确保电容器的方向正确,否则在给设备加电时可能会损坏或爆炸。
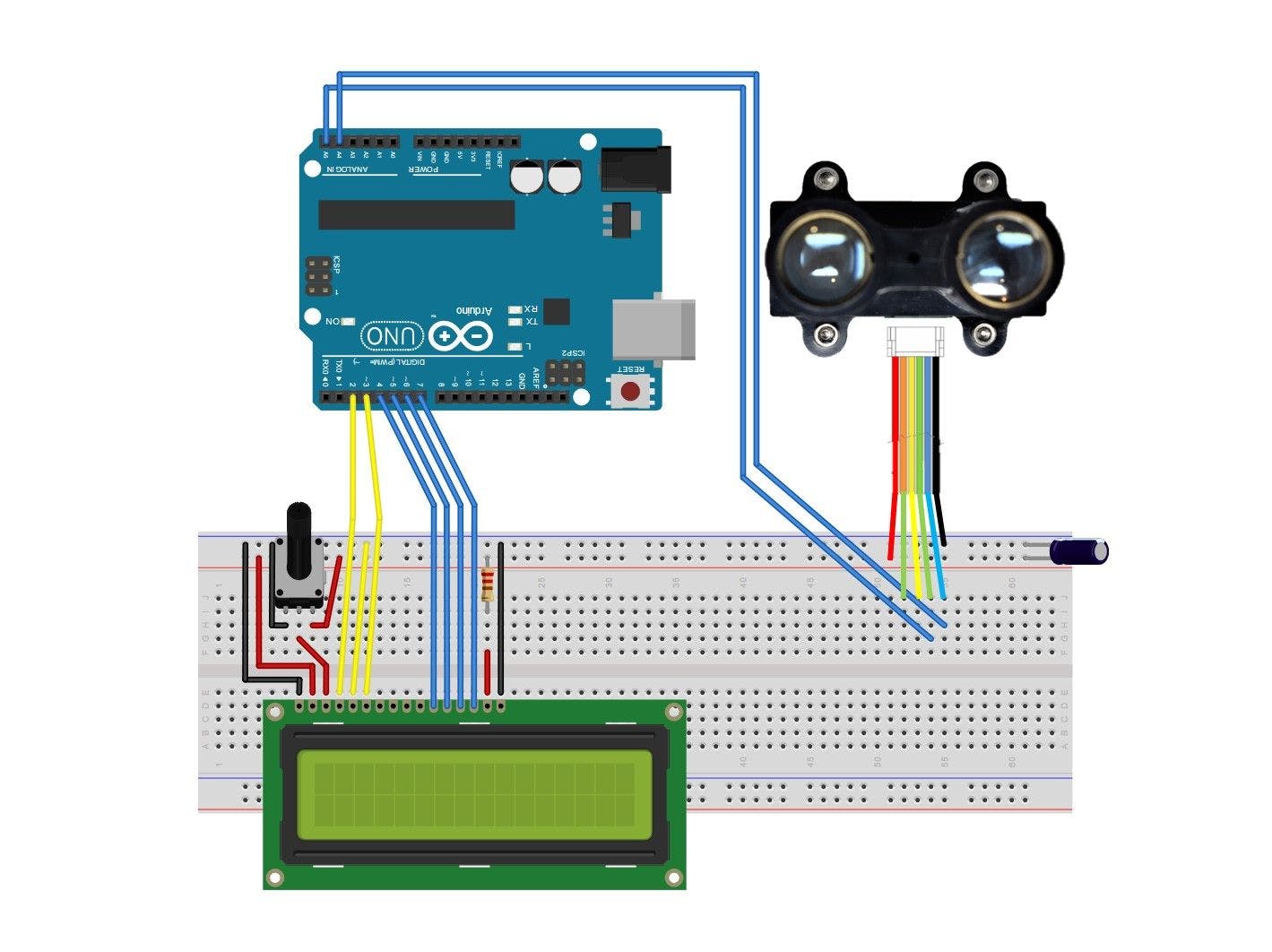
使用 8 英寸 M/M 跳线将 LiDAR-Lite 引脚 4 (I2C SCL) 和 5 (I2C SDA) 分别连接到引脚 A5 和 A4 中的 Uno 模拟。LiDAR-Lite 引脚 2 和 3 连接到面包板,但它们没有连接到任何东西——引脚 2 有一个内部上拉电阻以始终启用设备,而引脚 3 未连接,因为我们使用的是 I2C 模式。电路原理图如下所示。
燃料罐接线
如果您还没有将 Uno 安装到 FuelCan 的原型制作区域,请继续执行此操作。如果您使用的是面包板而不是 Modulus,请将面包板放在底部的储物箱中以限制跳线的长度。您需要使用提供的香蕉插孔来测试引线夹电缆,为面包板上的电源和接地轨提供 +5V 和 GND。您将需要两个公头针将测试引线夹安装在面包板一侧。将 USB 电缆的 A 型端插入 USB1 插座,将 B 型端插入 Uno 的插座。使用 AC-DC 电源适配器为 FuelCan 供电。
软件
一旦接线完成并且 FuelCan 通电,我们现在可以将草图加载到 Uno 上。您将需要 Garmin 的 LiDAR-Lite 库,该库可在此处获得。它会将您定向到他们的 GitHub 存储库。
下载库后,通过导航到Sketch -> Include Library -> Add.ZIP Library...将其添加到您的 Arduino IDE 。您还可以通过转到Sketch -> Library Manager并搜索“LIDAR”来安装该库。当搜索结果弹出时,安装 Garmin 库的 LIDAR-Lite。
下面的第一个草图在没有接收器偏差校正的情况下获取距离测量值,其中不考虑目标距离、设备温度或光学噪声。不使用接收器偏差校正的一个优点是您可以更快地获取距离测量值。但是,准确性和灵敏度会受到影响。
下一个草图(下图)定期执行接收器偏差校正。建议每 100 个连续测量命令执行一次。通过使用接收器偏差校正,提高了准确性和灵敏度。但是,获取距离测量值较慢。
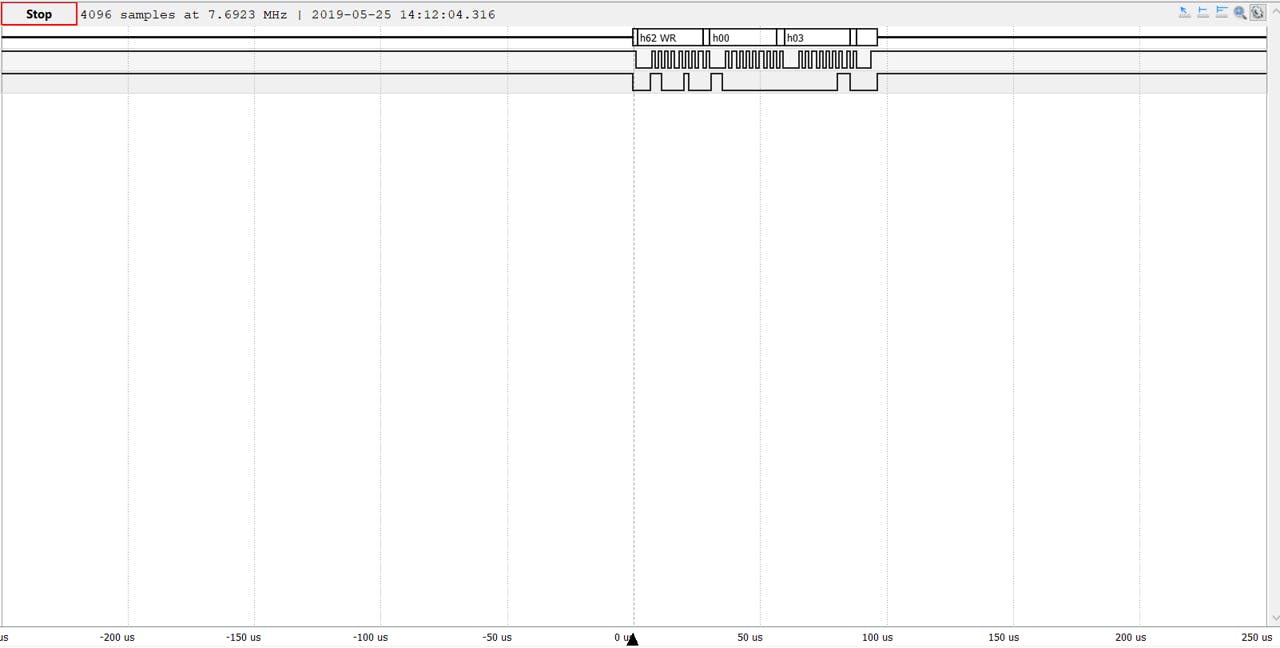
数字波形
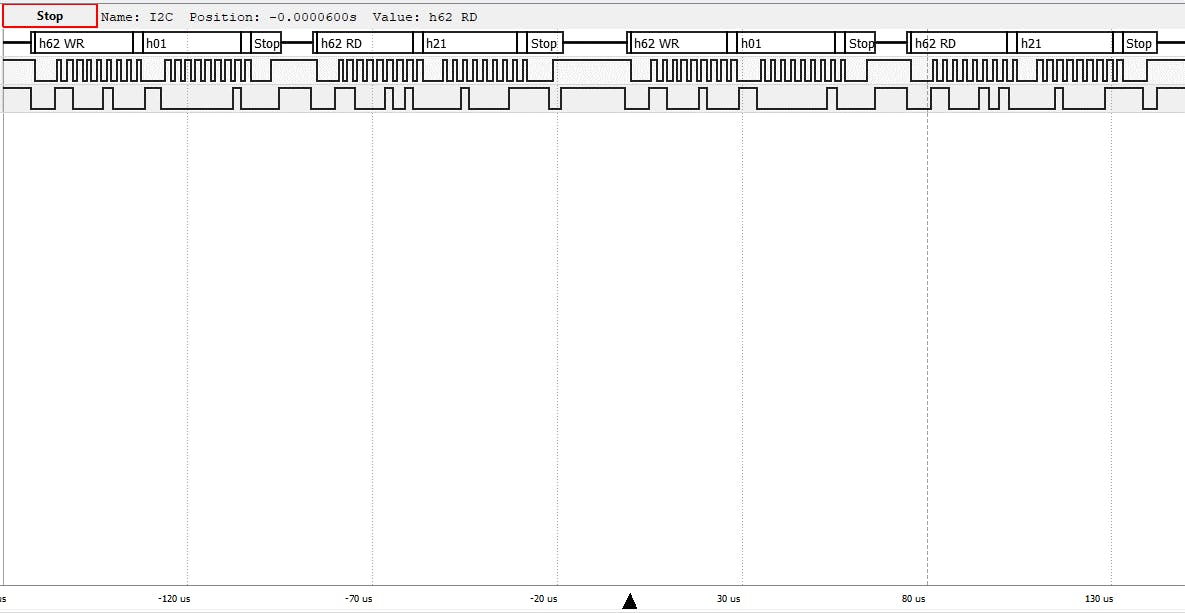
数字波形是在 SCL 和 SDA 线上采集的。第一个波形(下图)显示主机与从机通信,它希望将 0x03(无接收器偏置校正)写入从机寄存器 0x00。
第二个波形(下图)显示主机轮询从机状态寄存器 0x01,直到位 0 为零。您可以看到状态寄存器被读取了两次,因为位 0 为 1。
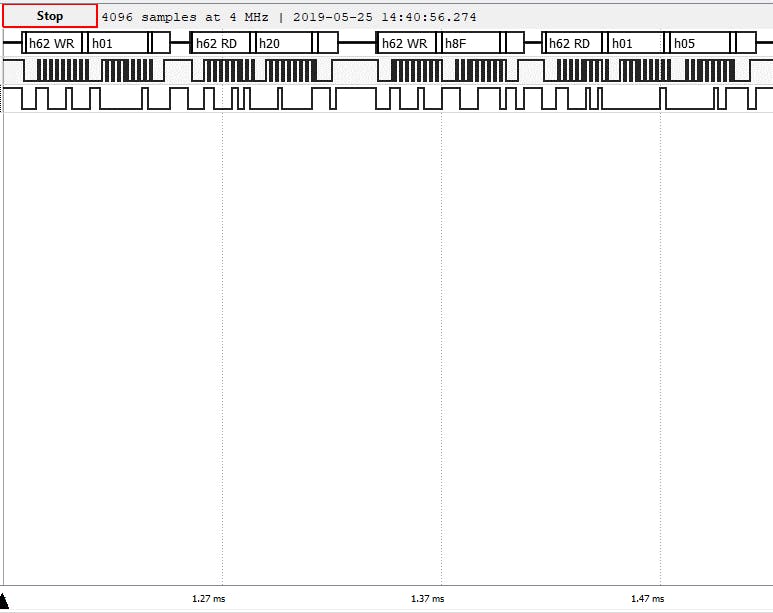
第三个波形(下图)显示主机轮询从机状态寄存器 0x01,直到位 0 为零。第二次轮询从属寄存器时,位 0 为零,因此主机能够继续从从属设备检索距离测量值。主机发送 0x8F 用于连续读取从机寄存器 0x0F 和 0x10。在最后一帧中,从机分别从寄存器 0x0F 和 0x10 发送两个字节的数据,0x01 和 0x05。
- USB供电模块开源
- 蓝牙模块开源分享
- XBee射频模块开源分享
- HC 05蓝牙模块开源分享
- Amanero显示模块开源分享
- HHKB Lite 2 Teensy 2.0控制器开源
- DDCSV门户对齐模块开源分享
- DIY RTC模块开源
- 开源网络协议分析器WireShark软件下载 15次下载
- EE-196:ADSP-BF535黑幕,EZ-KIT-Lite-Lite-PE-Lite-Lite-P
- 开源课程行动倡议及科学导论综述 6次下载
- 浅谈LiDAR感应器在iPhone 12 Pro上的应用,将如何改变3D新闻内容的生产资料下载
- 高通QCC5144蓝牙模块原理图下载 19次下载
- Orange Pi Lite香橙派开发板的电路图合集免费下载 75次下载
- Orange Pi Lite的用户手册免费下载 3次下载
- NVIDIA全面转向开源GPU内核模块 1.8k次阅读
- 什么是LiDAR?LiDAR技术的新时代 前景广阔未来可期 1.9k次阅读
- 激光雷达LIDAR基本工作原理 9k次阅读
- VoxelMap++:在线LiDAR惯性里程计实现可合并的体素建图方法 1.9k次阅读
- 应用于机器人3D感知的高精度LiDAR与电机驱动解决方案 1.8k次阅读
- 华为新版模拟器eNSP Lite安装攻略 9.3k次阅读
- 什么是LiDAR?LiDAR的工作原理 1.2w次阅读
- LiDAR系统利用GaN的坚韧 3.2k次阅读
- 微雪电子树莓派计算模块扩展板 CM3/3Lite/3/3+介绍 6.5k次阅读
- 米尔科技Z-turn Lite IO Cape简介 1.6k次阅读
- 激光雷达LIDAR的工作原理及特点应用分析 1.9w次阅读
- 探讨机械式LiDAR技术优势和发展现状 5.3k次阅读
- 固态LiDAR传感器技术在智能交通系统中的应用 2.3k次阅读
- pSemi推出应用于固态LiDAR的GaN FET驱动器PE29101 6.7k次阅读
- 详细无人驾驶汽车的关键技术——LiDAR 1.8w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1矽力杰 Silergy SY7215A 同步升压调节器 规格书 Datasheet 佰祥电子
- 1.12 MB | 5次下载 | 免费
- 2HT81696H 内置升压的30W立体声D类音频功放数据手册
- 1.21 MB | 1次下载 | 免费
- 3HTA6863 3W超低噪声超低功耗单声道D类音频功率放大器数据手册
- 0.87 MB | 次下载 | 免费
- 4南芯 Southchip SC8802C 充电控制器 规格书 Datasheet 佰祥电子
- 88.16 KB | 次下载 | 免费
- 5矽力杰 Silergy SY7065 同步升压转换器 规格书 Datasheet 佰祥电子
- 910.67 KB | 次下载 | 免费
- 6矽力杰 Silergy SY7066 同步升压转换器 规格书 Datasheet 佰祥电子
- 989.14 KB | 次下载 | 免费
- 7WD6208A产品规格书
- 631.24 KB | 次下载 | 免费
- 8NB685 26 V,12 A,低静态电流,大电流 同步降压变换器数据手册
- 1.64 MB | 次下载 | 2 积分
本月
- 1EMC PCB设计总结
- 0.33 MB | 12次下载 | 免费
- 2PD取电芯片 ECP5702规格书
- 0.88 MB | 5次下载 | 免费
- 3矽力杰 Silergy SY7215A 同步升压调节器 规格书 Datasheet 佰祥电子
- 1.12 MB | 5次下载 | 免费
- 4氮化镓GaN FET/GaN HEMT 功率驱动电路选型表
- 0.10 MB | 3次下载 | 免费
- 5PD取电芯片,可取5/9/12/15/20V电压ECP5702数据手册
- 0.88 MB | 3次下载 | 免费
- 6SY50655 用于高输入电压应用的伪固定频率SSR反激式稳压器英文资料
- 1.01 MB | 3次下载 | 免费
- 7怎么为半导体测试仪选择精密放大器
- 0.65 MB | 2次下载 | 免费
- 8SY52341 次级侧同步整流英文手册
- 0.94 MB | 2次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935137次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420064次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233095次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191469次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183360次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81606次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73832次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65991次下载 | 10 积分



 工商网监
工商网监
评论