 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
Kria KV260 Vision AI 入门套件是今年早些时候推出的 SoM(系统级模块)开发板,我当时在一篇项目文章中介绍了最初的内容,展示了在不需要的情况下启动和运行 AI 加速应用程序设计是多么简单复杂的FPGA设计知识。就像我在那个项目中所说的那样,当我得到一个新的 Xilinx FPGA 板时,我通常会直接前往 Vivado,但我不需要为了让 Kria KV260 最初启动并运行。
但是,我立即对初始图像中的硬件设计以及如何在 Vivado 中进行设置以便将来能够添加到它感到好奇。所以我更新到 Vivado 2021.1 并加入。
创建 Vivado 项目
首先从命令行获取 Vivado 工具并启动 Vivado GUI:
~$ source /tools/Xilinx/Vivado/2021.1/settings64.sh
~$ vivado
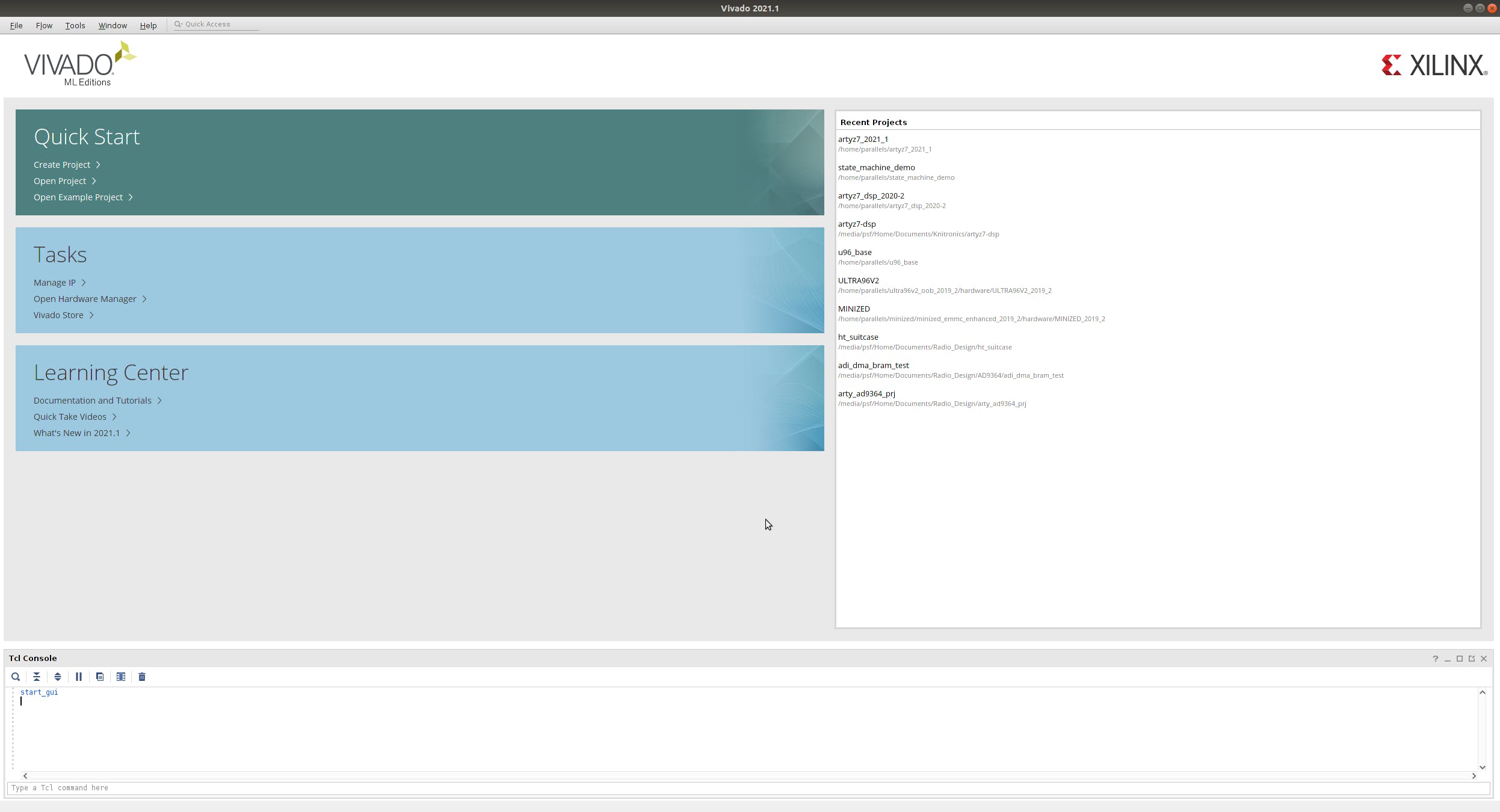
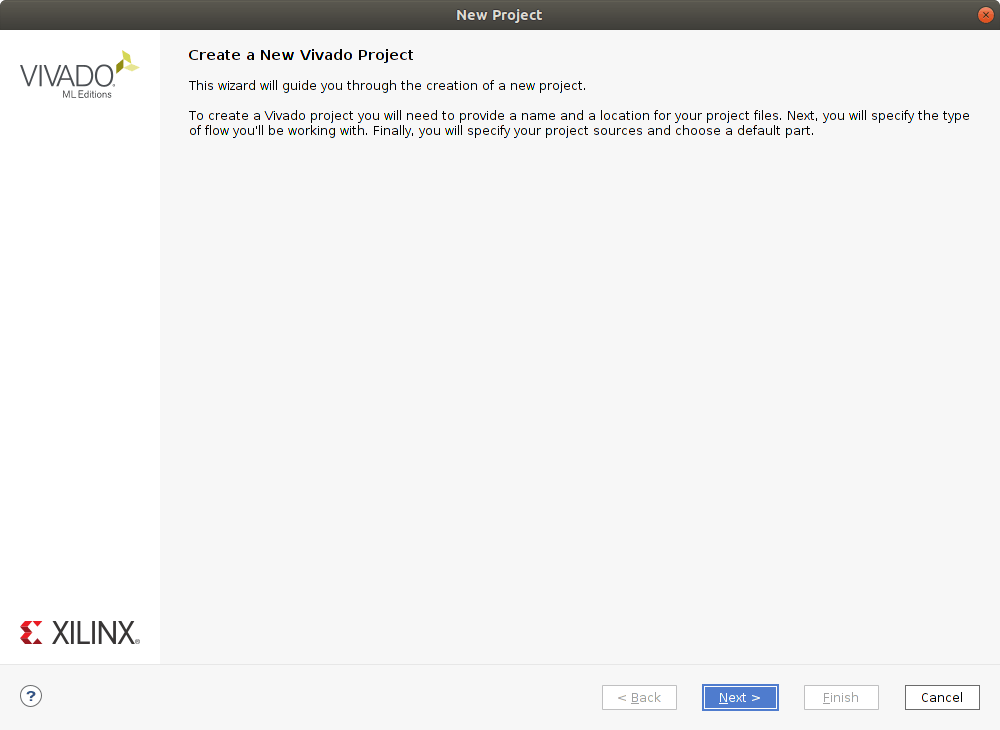
选择创建新项目的选项。为项目提供所需的名称并指定所需的文件路径。我不建议使用网络驱动器,因为 Vivado 无法很好地处理网络驱动器位置。
在下一页上,保留 RTL Project 的默认选择和暂时不指定源文件的选项处于选中状态。此外,如果您打算仅使用 Xilinx 预构建的加速应用程序,请不要选中使项目成为可扩展 Vitis 平台的选项(因此将其保留为 Xilinx 所称的固定平台)。
起初这对我来说是不直观的,因为可扩展 Vitis 平台的全部意义在于为内核提供硬件挂钩,以便内核访问它以在 Linux 等操作系统中进行硬件加速。但是,这仅是当内核需要访问的硬件经过路由或位于 FPGA 的可编程逻辑中时。当硬件通过 MIO 之类的东西直接连接到 Zynq/ZynqMP 处理系统时,硬件平台可以是一个简单的固定平台,因为内核已经可以直接访问外围设备。
当您第一次开始阅读有关如何/为什么在 Vivado 中设置硬件平台以供以后在 Vitis/PetaLinux 中使用时,我觉得这不是最清楚的,所以我认为在这里指出是很重要的。
关于 Vivado 2021.1 的另一件值得注意的事情是,安装板预设文件的原因发生了巨大变化。Vivado 2021.1 无需自己下载并手动将它们放置在Vivado 安装目录中的board_files目录中(这个文件夹实际上甚至不再存在),而是在其后端链接到 Xilinx 的 Github 存储库,您可以在其中选择和下载电路板预设当您选择要针对项目的部件/板时,直接从开始菜单 GUI 中获取所需的文件。
块设计
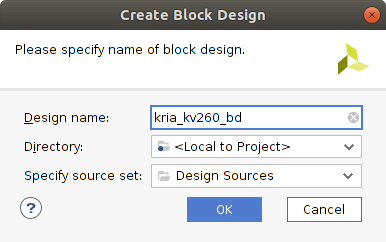
通过创建一个新的块设计开始整体设计,从 Flow Navigator 窗口中选择Create Block Design并为其命名。
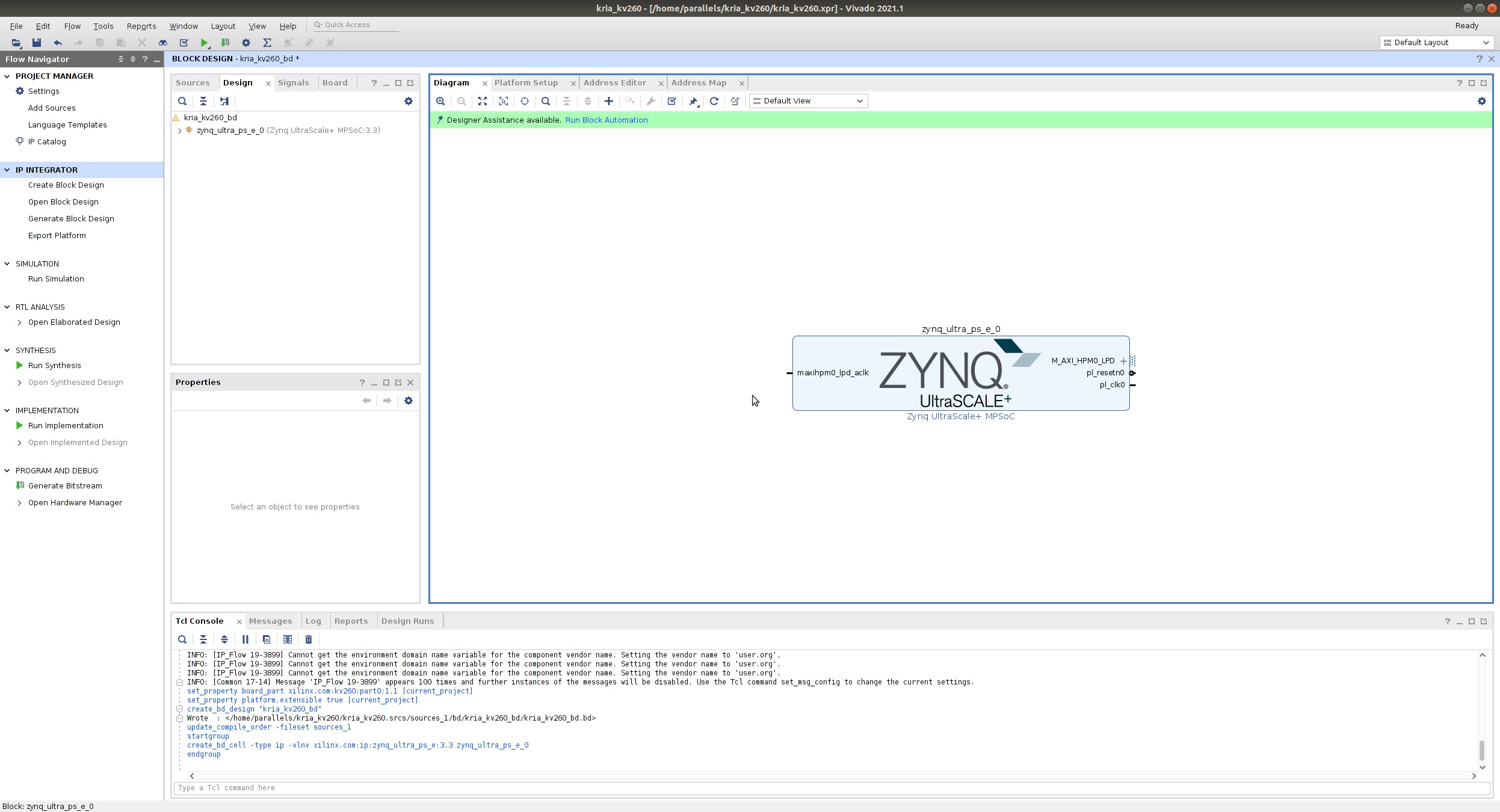
将 Zynq MPSoC IP 模块添加到模块设计中,并运行生成的模块自动化以将 KV260 板预设应用到它。KV260 PetaLinux BSP 只需要 ZynqMP 处理系统 IP 块,因为看起来 KV260 基板上的所有外设都通过 MIO/EMIO 引脚直接路由到 Zynq 处理系统。
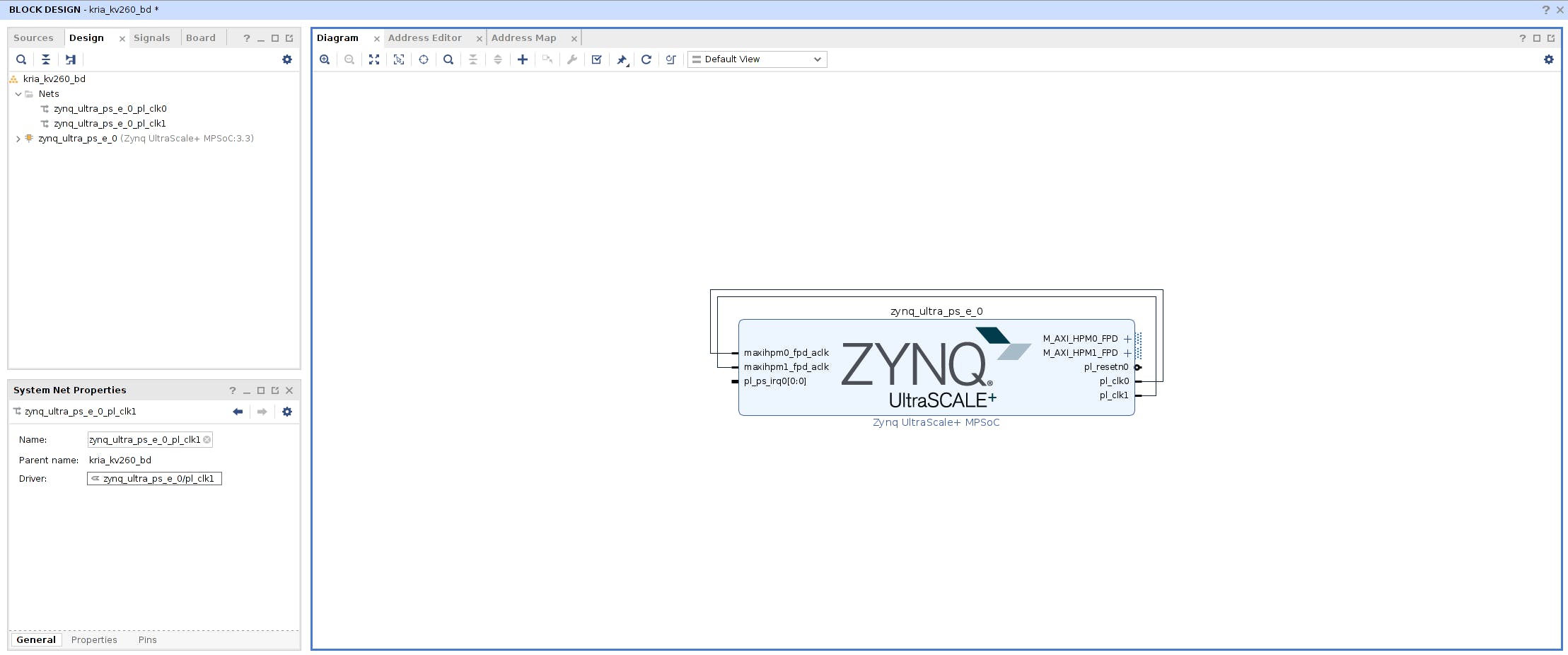
运行块自动化后,将pl_clk0连接到maxihpm0_fpd_aclk并将pl_clk1连接到maxihpm1_fpd_aclk:
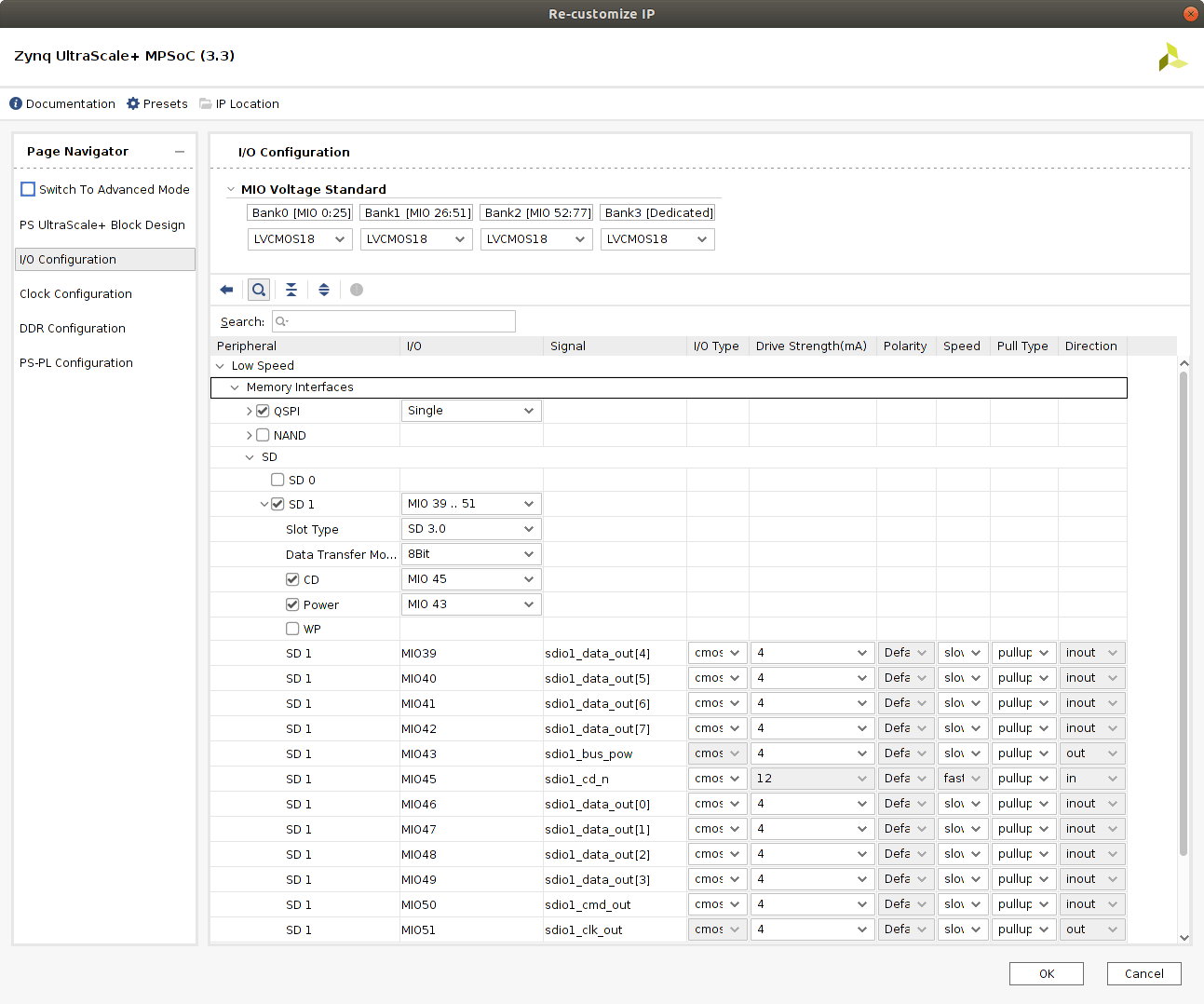
我发现电路板预设并不能完全涵盖 KV260 基板的整个配置。KV260 板上的 SD 卡、DisplayPort、UART、以太网和 USB 3.0 外设未通过运行块自动化应用板预设而配置到 ZynqMP 处理系统 IP 中。它仅适用于 Kria K26 SoM 板配置,例如 DDR4、QSPI 和 eMMC。
因此,要启用 KV260 基板外设,请双击 ZynqMP 处理系统 IP 块将其打开并根据以下说明启用 SD 卡、DisplayPort、UART、以太网和 USB 3.0:
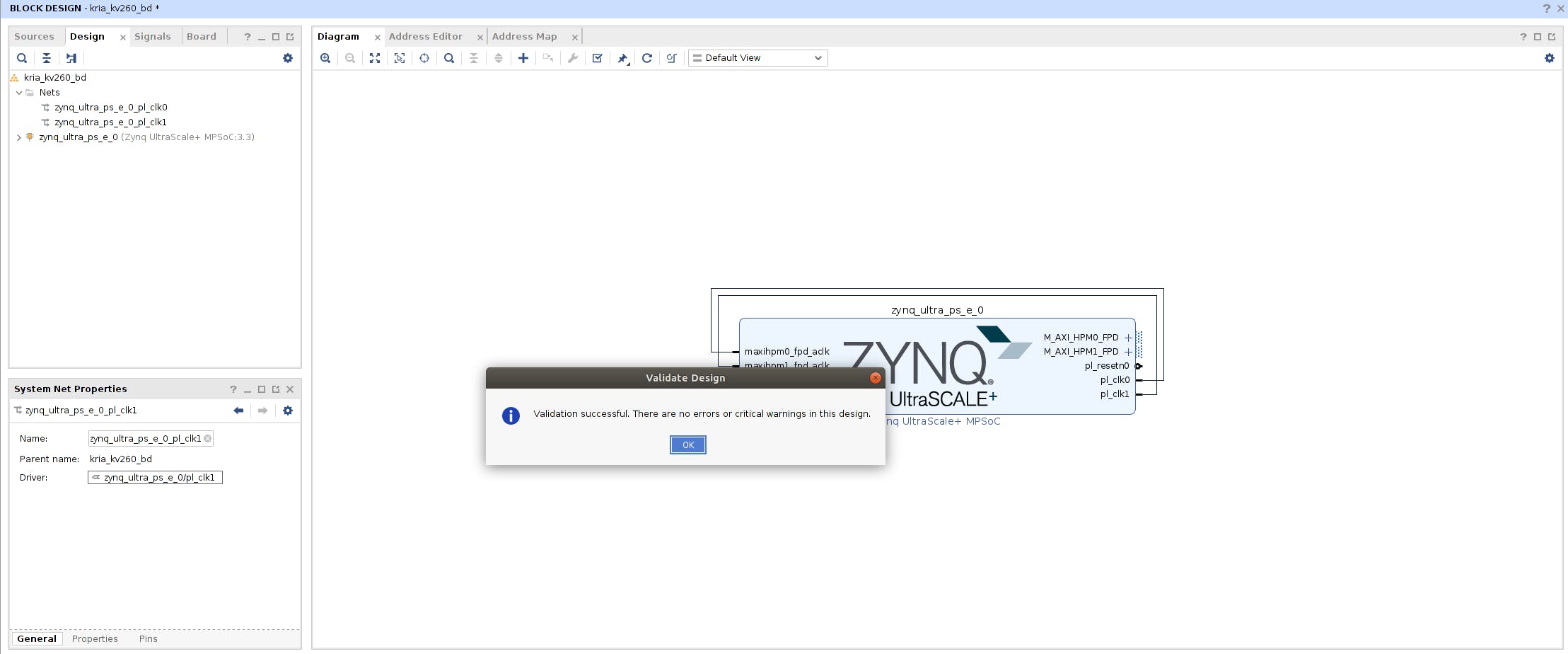
更新 ZynqMP 处理系统 IP 后,验证设计以确保没有严重错误或警告。
HDL 包装器
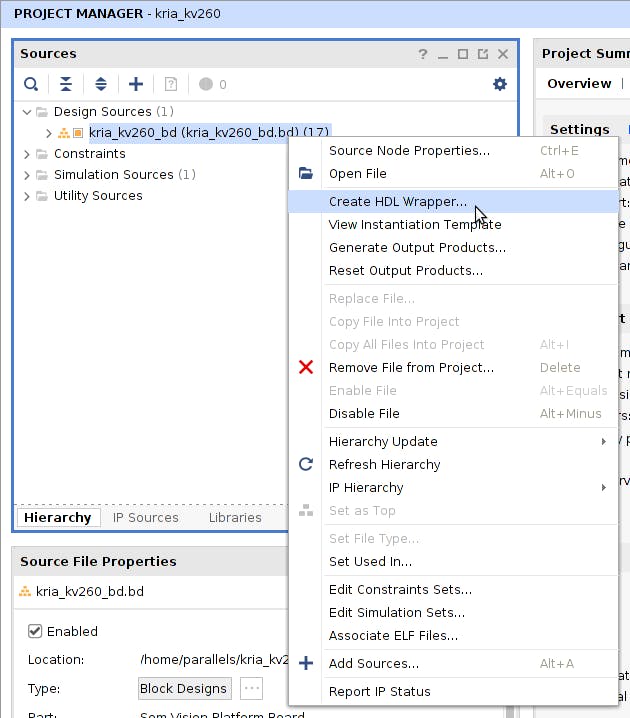
保存并关闭模块设计并切换到 Sources 窗口中的 Hierarchy 选项卡。右键单击模块设计文件并选择选项以创建 HDL 顶级包装器以在 Vivado 项目中对其进行实例化。
选择该选项以允许 Vivado 管理 HDL 封装器并自动更新它。
约束
使用Flow Navigator中的Add Sources选项创建一个新的约束文件。
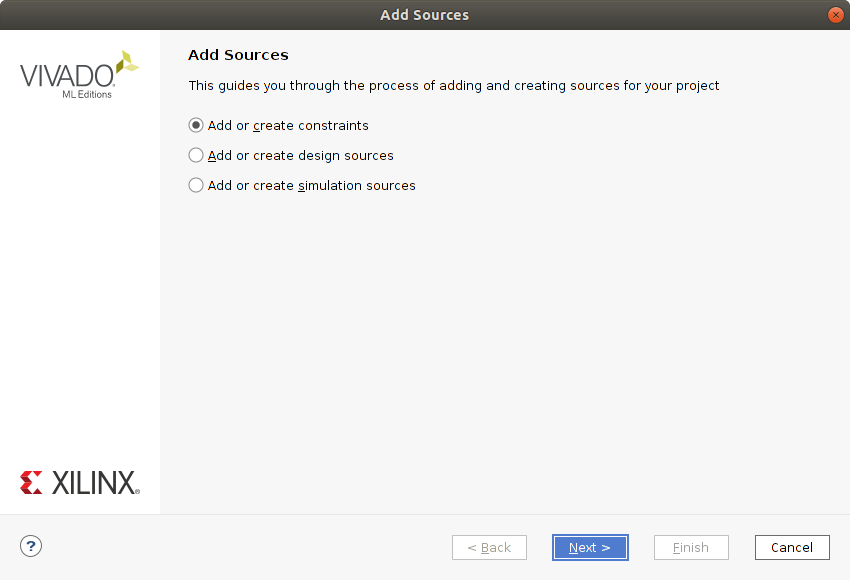
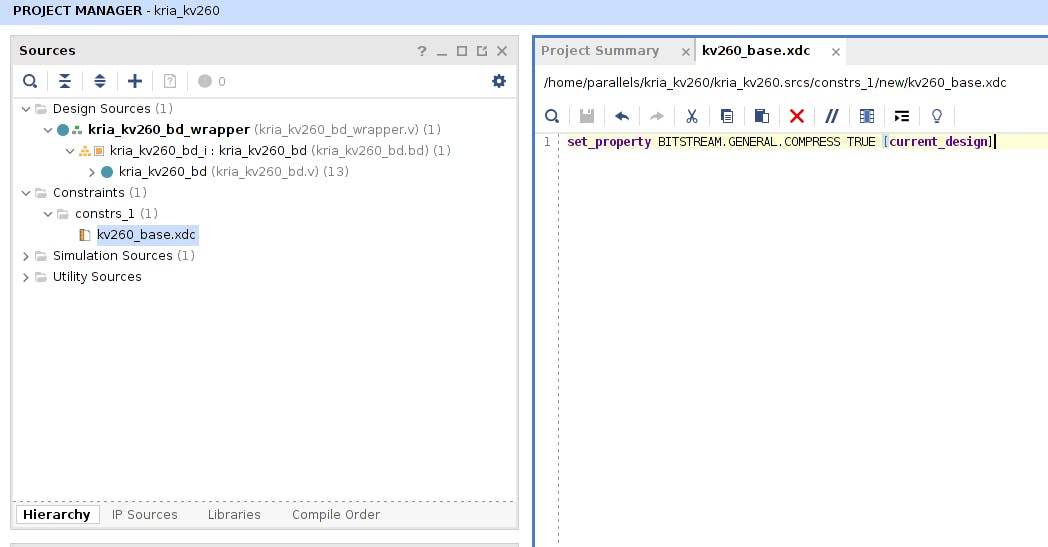
打开新创建的并添加项目约束。目前唯一的限制是比特流压缩,因为没有任何东西通过 PL 路由,所以不需要引脚分配。但是当添加自定义硬件时,这种情况会发生变化。
将以下行添加到约束文件,然后保存并关闭它:
set_property BITSTREAM.GENERAL.COMPRESS TRUE [current_design]
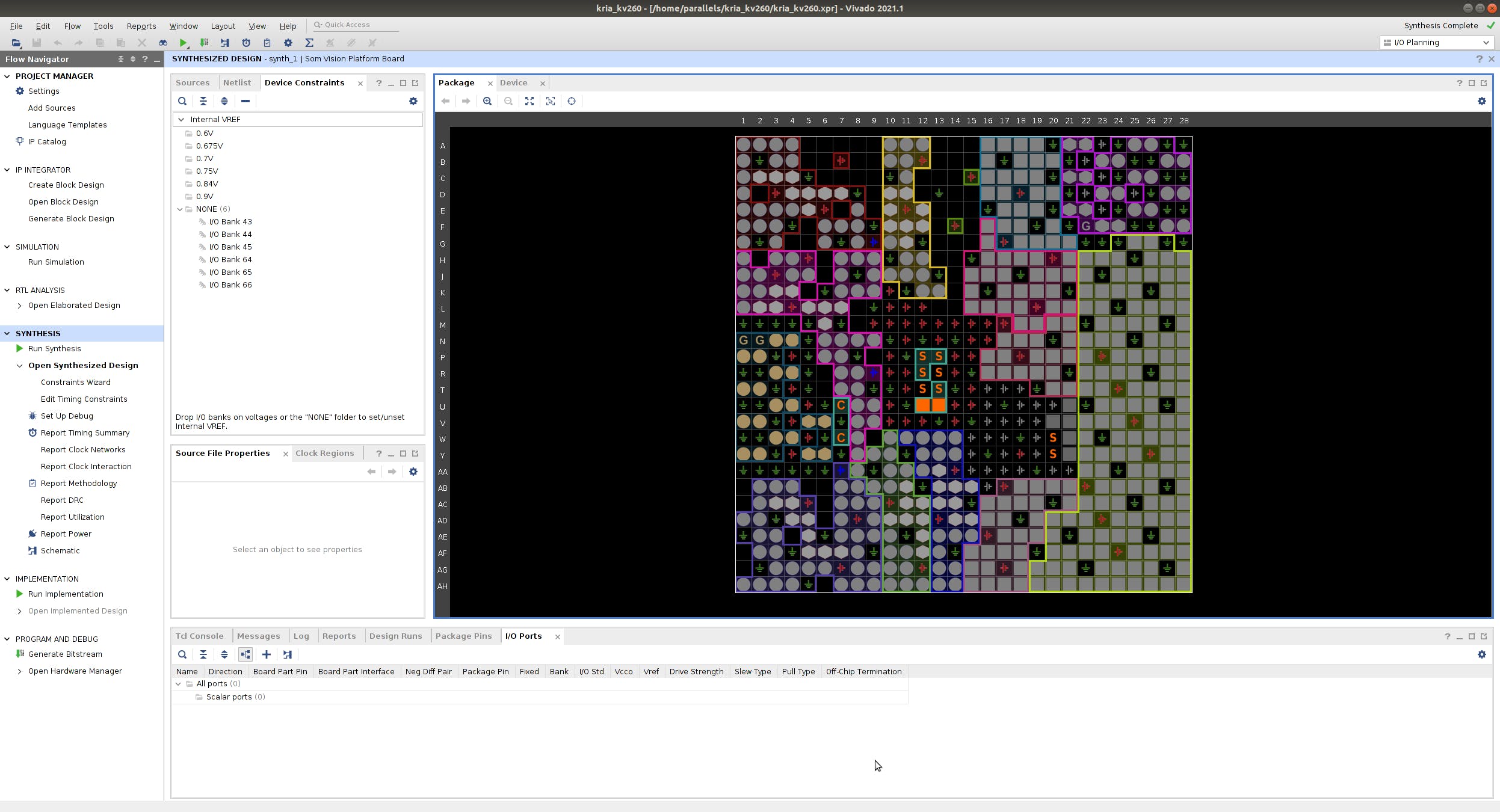
编译设计
使用 Flow Navigator 窗口中的项目流程运行综合、实现并为项目生成比特流。
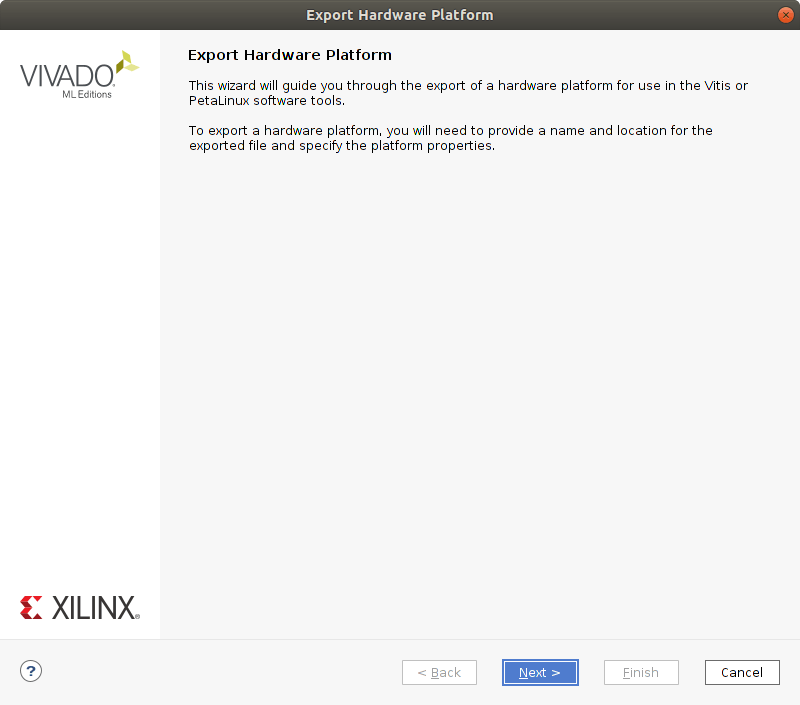
出口硬件
要在 Vitis 或 PetaLinux 中使用来自 Vivado 项目的硬件设计,必须将其打包在 Xilinx 专有的.XSA 包中作为硬件平台。
单击文件 > 导出 > 导出硬件...,并确保选择将比特流包含在导出的硬件平台中的选项。
对于导出位置,我个人喜欢将其设置为 Vivado 项目本身的顶级文件夹中的默认值。
打包并导出硬件平台后,下一步是创建软件以通过 Vitis 或 PetaLinux 在其上运行。Kria KV260 PetaLinux 项目是我将在我的下一个项目移植中介绍的内容。如果您正在寻找如何将您自己的定制硬件添加到 Kria KV260 入门套件的基本设计的起点,希望这个项目会有所帮助。
- Kria KV260视觉AI入门套件用户指南 2次下载
- Kria KR260机器人入门套件:通过硬件加速释放机器人 4次下载
- 适用于AWS IoT Greengrass的Xilinx KV260入门指南 0次下载
- 创建自定义Kria KV260加速ML应用程序 0次下载
- 使用KV260进行事故检测 3次下载
- 使用Xilinx KV260对智能家居设备进行手势控制 1次下载
- Vitis ai 1.4 KV260镜像开源 0次下载
- 在KV260上运行Yolov4 tiny 2次下载
- Xilinx KV260 Vitis-AI 1.4人脸检测 0次下载
- 为Kria KV260添加USB WiFi 0次下载
- Kria KV260 AI视觉套件入门 2次下载
- Xilinx Kria KV260套件的第一个硬件项目 0次下载
- 使用Xilinx Kria KV260进行AI火灾探测 5次下载
- Kria KV260上的动态交通灯系统 3次下载
- Xilinx_Vivado_zynq7000入门笔记 70次下载
- AMD Kria KR260 DPU配置教程3 271次阅读
- AMD Kria KR260 DPU配置教程2 453次阅读
- AMD Kria KR260 DPU配置教程 465次阅读
- 如何在KV260上快速体验Vitsi AI图像分类示例程序 970次阅读
- 用TCL定制Vivado设计实现流程 676次阅读
- Tcl在Vivado中的应用 963次阅读
- 在ubuntu上安装vivado2021.1时一直卡在最后一步怎么办 4676次阅读
- 如何升级Vivado工程脚本 1544次阅读
- 在u-boot中使用ethernet的方法 3057次阅读
- 如何在LiDAR点云上进行3D对象检测 1786次阅读
- 关于Vivado 2019.1的Dashboard功能详解 7681次阅读
- xilinx Vivado工具使用技巧 3754次阅读
- Vivado 2017.1和Vivado 2016.4性能对比分析 9675次阅读
- Vivado获取License的步骤教程 5.8w次阅读
- Tcl在Vivado中的基础应用 4675次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论