 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
这个机器人一直是我的梦想,现在终于完成了!
特征:
补给品:
- Raspberry Pi 零 W -在 Adafruit
- Arduino Nano -在纽瓦克
- TT 变速箱电机 -在 Adafruit
- 超小纸箱
- 公/母跳线 -在纽瓦克
- 母/母跳线 -在纽瓦克
- 公/公跳线 -在这里 - 你猜对了 - 纽瓦克
- DRV8833 电机驱动器 -在 Adafruit
- Raspberry Pi 摄像头模块 -在纽瓦克
- 滑动开关 -在纽瓦克
- 9V电池
- 9V 电池夹 -再次来到纽瓦克
- USB 锂离子电池充电器 -在 Adafruit
- 2 节锂离子电池 1000mAh -在纽瓦克
- 脚轮 -在 Adafruit
- Raspberry Pi 零到相机适配器带状电缆 -在 Adafruit
- USB 到 Micro-B 电缆 -在 Ebay 上
应用:
- Raspberry Pi OS -在 Raspberry Pi
- Arduino 创建网络编辑器 -在 Arduino
工具:
第 1 步:底盘设计
这就是 3D 打印机的用武之地。如果需要,您可以为您的盒子打印底盘。
首先,拿出你的热胶枪并将其加热。(别担心,热胶只是暂时的。)加热后,拿你用来做底盘的任何东西,然后把 TT 电机粘在上面。然后,将盒子粘在上面。
第 2 步:电池安装
使用双面胶将 9v 电池固定在侧面,并使用另一个将 3.7v 电池固定在侧面。将 2 根普通跳线放入 3.7v 电池孔中。将 2 个 MF 跳线放在 9v 电池线上。在盒子的侧面钻一个孔,然后将 3.7v 电池线穿过。
3.7v 电池用于 Arduino,9v 电池用于电机。
第 3 步:电机驱动器安装
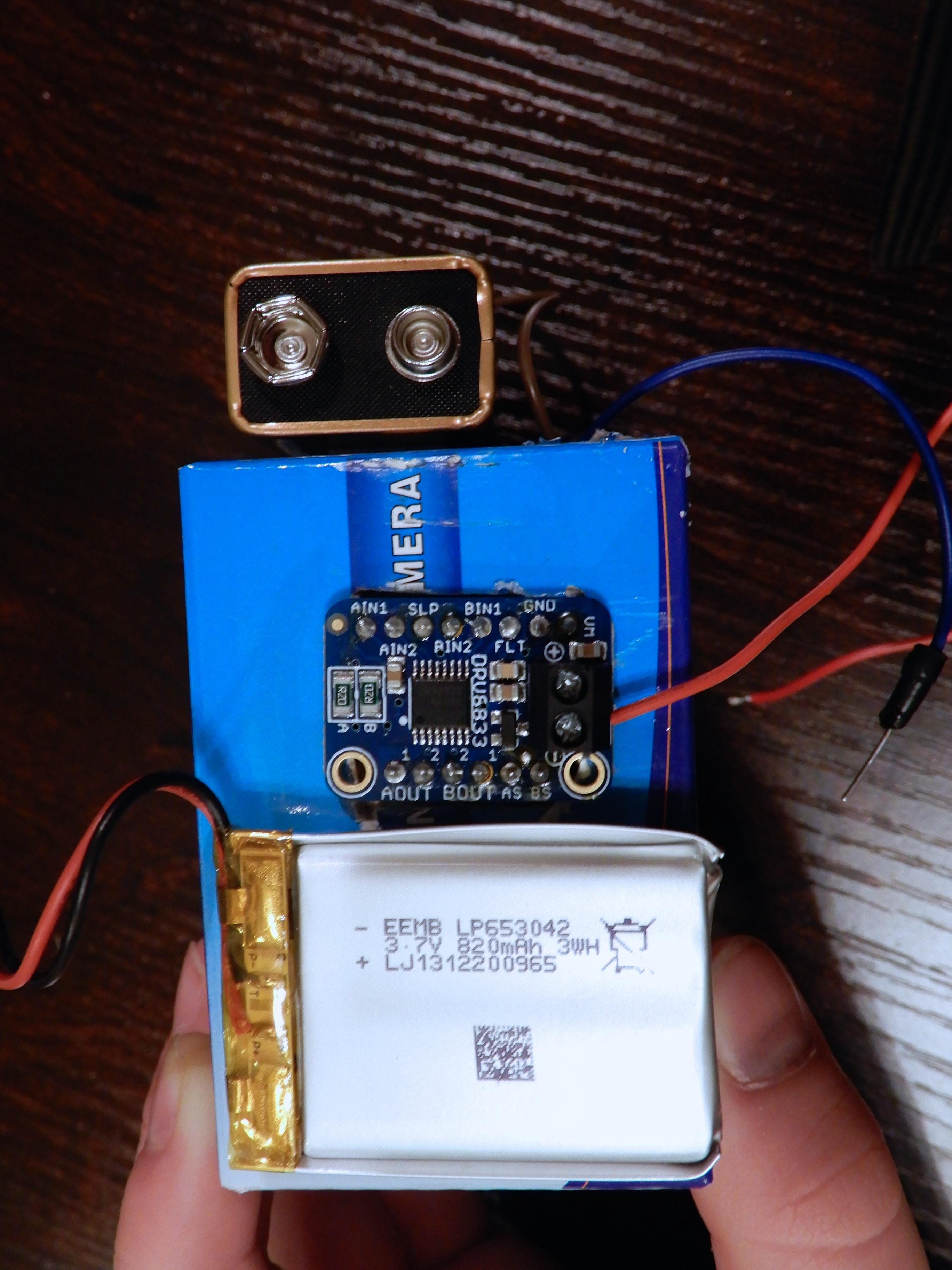
用旋转工具在盒子上切一个 DRV8833 大小的孔。(我建议你测量它。)
将 DRV8833 热胶粘在边缘周围。我说热胶是因为你可能需要做出改变。
第 4 步:传感器安装
拿起你的 HC-SR04 并测量它。得到长度和宽度,然后在机箱外壳上画出相应距离的线,制作切割模板。
使用旋转工具切割线条。
将超声波传感器穿过孔。如果合适的话,太好了!如果不是,请相应调整。确保“光束”没有被阻挡。
像使用 DRV8833 一样在它周围粘上胶水。
第 5 步:接线
这是最难的部分。
因为线太多,所以我没有做电路图,但下面的列表显示了引脚编号。
引脚编号:
- 将您的 HC-SR04 触发到引脚 9
- HC-SR04 的回声到引脚 10
DRV8833 引脚:
- AIN1 到引脚 4
- AIN2 到引脚 5
- SLP 至 3.3V
- BIN2 到引脚 6
- BIN1 到引脚 7
- AOUT 1 至左电机 RED
- AOUT 2 至左电机 黑色
- BOUT 2 到右电机黑色
- BOUT 1 至右侧电机 RED
和往常一样,将电源线放在各自的位置。我建议将每个电源引脚断开到面包板条上。将 Nano 放入盒子中(如果不这样做,则无法连接它)。
将第一个电池的红色插入 Nano 的 VIN,然后当你准备好滚动时,将电池的黑色插入 GND。
第 6 步:编码
在 GitHub下载 Arduino 的代码。将其上传到您的 Nano。
在启动时在 Raspi Zero 上运行 .py 文件,如下所示:
在终端中运行此命令:
sudo nano /etc/rc.local
在 exit0 行之前添加此行:
python3 /home/pi/Desktop/(Ra)Spy-Bot Cam.py &
按 ctrl + x,然后按 y,然后输入。
而已!
对于流式传输,做同样的事情,但在 exit0 行之前添加此行:
python3 /home/pi/Desktop/(Ra)Spy-Bot Stream.py &
注意:将文件名和路径更改为适合您的文件名和路径,例如:
python3 /home/pi/Documents/your_file_name &
第 7 步:相机安装
在前面钻一个足够大的孔来安装相机,然后将带有适配器电缆的相机插入 Raspi Zero 的连接器。
将相机穿过孔,然后粘上边缘。把你的零放在机箱外壳中。将 USB 转电池转换器放入您的盒子中,准备好后,插入并观看记录!
第8步:完成!
确保外壳中没有短路。打开它。如果成功了,恭喜!!!你做到了!
做一个测试任务来庆祝,然后休息一下,观看你的 1 1/2 分钟节目或直播!
感谢您观看我的项目!
直到下一次,
来自 g3holliday 的快乐制作
- EMAR迷你紧急救援机器人的设置和安装
- 扫地机器人开源资料 43次下载
- Feather蓝牙迷你机器人
- 英雄机器人开源
- 迷你自主机器人开源分享
- 机器人开源案例
- Arduino Uno迷你机器人开源分享
- 迷你平衡机器人
- 基于DSP和PC的农业机器人控制系统 17次下载
- 可视频直播的Raspberry Pi网络控制机器人 14次下载
- 基于RTP协议的视频流媒体实时传输 20次下载
- 基于新松机器人的LOVE字样视频 48次下载
- 四足机器人测试视频下载 130次下载
- 移动流媒体技术在视频监控中的应用
- 基于Directshow的流媒体视频混合及网络传输系统
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 360次阅读
- 机器人技术中常用的路径规划算法的开源库 842次阅读
- OpenHarmony视频录制流程介绍 535次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- dfrobotSparki机器人套装简介 2064次阅读
- dfrobot优质迷你面包板简介 1706次阅读
- 工业机器人编程入门_工业机器人的编程要求 9571次阅读
- 医用机器人的定义_医用机器人发展 3122次阅读
- 医用机器人的功能_医用机器人分类 2227次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 如何区分机器人、协作机器人和移动机器人? 6828次阅读
- 云视频技术让机器人更具有娱乐性让机器人更融入你的生活 3520次阅读
- 飞思卡尔I.MX27机器人视频监控系统设计 718次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.4w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论