 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
在最近的一篇文章中,我们看到了如何使用 Python 和 JQWidgets 通过移动设备控制 Adafruit NeoPixel 环。
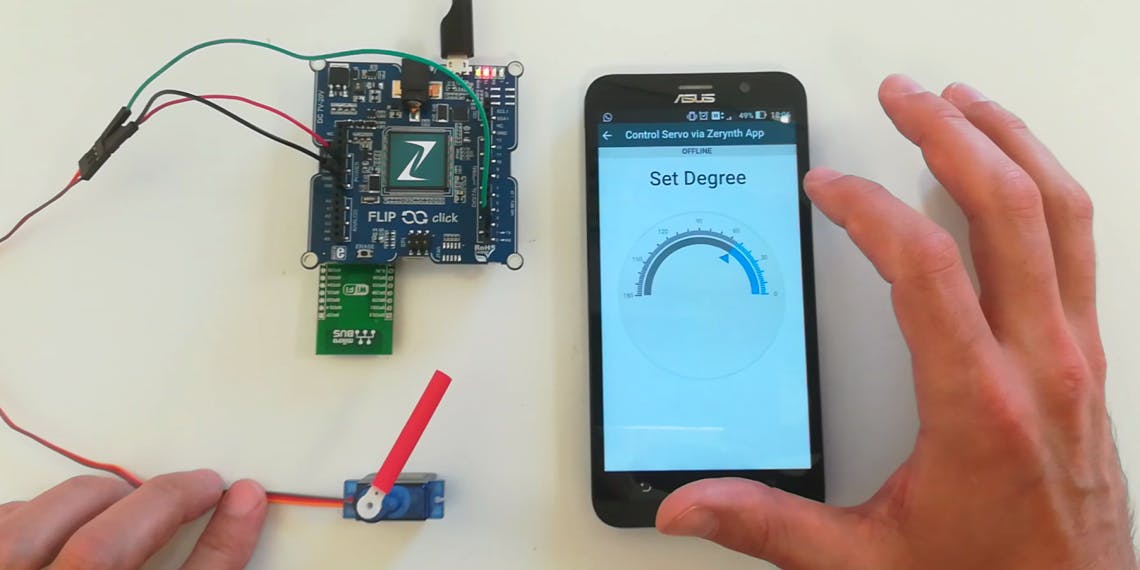
让我们做一些类似的事情,但使用另一个非常流行的“执行器”:伺服电机,即用于精确控制角位置的旋转执行器。
我们将使用 Zerynth Studio 在 Python 中对基于微控制器的板进行编程,并 使用 Zerynth App 来运行基于 JQWidget 的图形用户界面。
所需材料
- 首先,你需要一块板子。您可以选择 Zerynth 支持的 32 位微控制器设备之一。我们选择了Mikroelektronika 的Flip&Click,它搭载了Microchip的流行 MCU SAM3X 。
- 您还需要一个允许您将电路板连接到互联网的元素。我们选择了Mikrolektronika的WiFi 4 Click
- 您还需要一个伺服电机:我们选择了非常受欢迎的 TowerPro SG90。
最后但并非最不重要的一点是,您需要:
- Zerynth 应用程序。你可以 在这里下载。
组装
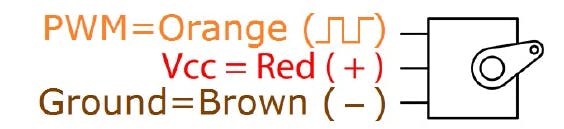
只需将WiFi 4 Click 到 Flip&Click 的插槽“A” 并连接伺服如下:
- 伺服的棕色线到 Flip&Click 的 GND 引脚
- 伺服的橙色线到 Flip&Click 的 3.3V 引脚
- 伺服器的黄线连接到 Flip&Click 的 PWM 引脚(例如 D2)
编程
安装 Zerynth Studio 并 创建 Zerynth 用户后,您 必须注册并虚拟化开发板。查看 Particle Photon 的 Zerynth 官方文档以 快速入门。
现在您可以开始用 Python对您的电路板进行编程了!
创建一个新项目 并编辑 main.py 文件如下:
通过 Zerynth App 控制舵机:
# Control Servo via Zerynth App
from wireless import wifi
# change the following line to use a different wifi driver
from stm.spwf01sa import spwf01sa as wifi_driver
from servo import servo
import streams
# Import the Zerynth APP library
from zerynthapp import zerynthapp
# connect the Servo to the pin D2
MyServo=servo.Servo(D2.PWM)
streams.serial()
degree = 0
sleep(1000)
print("STARTING...")
try:
# Device UID and TOKEN can be created in the ADM panel
zapp = zerynthapp.ZerynthApp("DEVICE UID", "DEVICE TOKEN")
wifi_driver.init(SERIAL1, D16) # WiFi Click on slot
for i in range(0,5):
try:
# connect to the wifi network (Set your SSID and password below)
wifi.link("SSID",wifi.WIFI_WPA2,"PASSWORD")
break
except Exception as e:
print("Can't link",e)
else:
print("Impossible to link!")
while True:
sleep(1000)
# Start the Zerynth app instance!
# Remember to create a template with the files under the "template" folder you just cloned
# upload it to the ADM and associate it with the connected device
zapp.run()
def set_degree(d):
global degree
degree = d
MyServo.moveToDegree(degree)
zapp.on("set_degree", set_degree)
while True:
sleep(50)
print("degree: ", degree)
except Exception as e:
print(e)
当然,您必须编辑您要连接板子的wifi网络的SSID名称和密码。
对比上面提到的项目的脚本可以看到,逻辑是一样的,代码也很相似。只是一些不同之处:
- 在这种情况下,我们使用了不同的 wifi 驱动程序,因此您必须导入SPWF01SA 模块而不是 BCM43362 模块来进行 WiFi 连接。
- 当然,您必须导入和设置Servo 库而不是 Neopixel 库。
- 然后,您必须定义一个函数,根据 Zerynth App 发送的数据设置伺服的度数。所以你必须定义一个函数“ set_degree ”而不是之前项目的函数“ set_color ”。
其余代码几乎保持不变。容易吧?感谢我们的Zerynth 虚拟机及其硬件抽象层功能。
只需再走一步,您就完成了!
在这个项目中,您也必须创建一个“已连接设备”并将“zerynthapp”实例链接到它。然后,您必须创建模板并将其链接到连接的设备。请查看本教程的“创建和设置连接的设备”和“创建、上传和设置模板”步骤以 了解更多详细信息。
index.html 文件应如下所示:
<html>
<head>
<meta charset="utf-8">
<meta http-equiv="X-UA-Compatible" content="IE=edge">
<meta name="viewport" content="width=device-width, initial-scale=1">
<title>Zerynthtitle>
<script src="https://ajax.googleapis.com/ajax/libs/jquery/1.12.4/jquery.min.js">script>
<link rel="stylesheet" href="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/css/bootstrap.min.css" integrity="sha384-BVYiiSIFeK1dGmJRAkycuHAHRg32OmUcww7on3RYdg4Va+PmSTsz/K68vbdEjh4u" crossorigin="anonymous">
<link rel="stylesheet" href="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/css/bootstrap-theme.min.css" integrity="sha384-rHyoN1iRsVXV4nD0JutlnGaslCJuC7uwjduW9SVrLvRYooPp2bWYgmgJQIXwl/Sp" crossorigin="anonymous">
<script src="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/js/bootstrap.min.js" integrity="sha384-Tc5IQib027qvyjSMfHjOMaLkfuWVxZxUPnCJA7l2mCWNIpG9mGCD8wGNIcPD7Txa" crossorigin="anonymous">script>
<script src="https://api.zerynth.com/zadm/latest/z.js">script>
<link rel="stylesheet" href="https://jqwidgets.com/public/jqwidgets/styles/jqx.base.css" type="text/css" />
<script src="https://jqwidgets.com/public/jqwidgets/jqx-all.js">script>
<script type="text/javascript" src="https://www.jqwidgets.com/public/jqwidgets/jqxcore.js">script>
head>
<body>
<div style="text-align:center">
<p id="status" style="background:#ddd;font-weight:bold">p>
<h1>Set Degreeh1>
div>
<div id='jqxKnob' style="width: 150px; height: 150px; position: relative; left: 30; top:30">
div>
<script>
$(document).ready(function () {
$('#jqxKnob').jqxKnob({
width: 300,
value: 0,
min: 0,
max: 180,
startAngle: 0,
endAngle: 180,
snapToStep: true,
rotation: 'counterclockwise',
style: { stroke: '#dfe3e9', strokeWidth: 3, fill: { color: '#fefefe', gradientType: "linear", gradientStops: [[0, 1], [50, 0.9], [100, 1]] } },
marks: {
colorRemaining: { color: 'grey', border: 'grey' },
colorProgress: { color: '#00a4e1', border: '#00a4e1' },
type: 'line',
offset: '71%',
thickness: 3,
size: '6%',
majorSize: '9%',
majorInterval: 10,
minorInterval: 2
},
labels: {
offset: '88%',
step: 30,
visible: true
},
progressBar: {
style: { fill: '#00a4e1', stroke: 'grey' },
size: '9%',
offset: '60%',
background: { fill: 'grey', stroke: 'grey' }
},
pointer: { type: 'arrow', style: { fill: '#00a4e1', stroke: 'grey' }, size: '59%', offset: '49%', thickness: 20 }
});
$('#jqxKnob').jqxKnob({allowValueChangeOnDrag: false });
$('#jqxKnob').jqxKnob({allowValueChangeOnMouseWheel: false });
$('#jqxKnob').on('change', function (event) {
Z.call('set_degree', [event.args.value]);
});
// initialize the Z object
Z.init({
on_connected: function(){$("#status").html("CONNECTED")},
on_error: function(){$("#status").html("ERROR")},
on_disconnected: function(){$("#status").html("DISCONNECTED"); return true},
on_online: function(evt){$("#status").html("ONLINE");},
on_offline: function(evt){$("#status").html("OFFLINE");},
on_event: function(evt){
//display received event;
}
})
});
script>
body>
html>
在本例中,我们使用了JQWidgets集合的“ jqxKnob ”元素。这段代码的主要部分是:
$('#jqxKnob').on('change', function (event) {
Z.call('set_degree', [event.args.value]);
});
Z.call 函数是从 Javascript 到 Python 的通道。每次移动旋钮时,Z.call 函数都会将值发送到设备,并将其用作相应 Python 函数的参数。
此时,您可以 将项目上传到您的设备。
最后,正如您在 这个非常简短的教程中所读到的,您只需打开 Zerynth 应用程序,登录并选择特定设备即可查看您的 GUI。
使用 Zerynth Studio PRO 启用固件无线 (FOTA) 更新
一旦你构建了你的智能项目,你就不想拆开所有东西来升级固件。
为了满足这一规范,Zerynth在Zerynth Studio PRO版本中包含了“ Firmware Over-the-Air ”功能 ,该功能还包括工业级功能,例如:
- 可选择的实时操作系统
- 省电
- 硬件驱动的安全固件以工业量在设备上烧录
- …以及更多
- 通过物联网控制伺服电机
- 基于Arduino UNO的手势控制伺服电机 0次下载
- 使用Python进行伺服PWM控制的MaaxBoard设置
- 通过互联网控制伺服电机
- 电机伺服项目开源
- 三菱PLC编程实例项目例程-伺服电机控制 41次下载
- 基于矢量控制的永磁同步交流伺服电机控制系统程序
- 交流伺服电机的单片机控制及其应用.
- 电机伺服控制的PCB原理图免费下载 82次下载
- PLC控制伺服电机学习资料pdf下载 55次下载
- PLC控制伺服电机应用实例 66次下载
- 交流伺服电机的模糊PID控制及GUI设计 26次下载
- 控制三菱伺服电机的具体程序设计 472次下载
- 机电控制中伺服电机的作用
- IT项目的质量控制 0次下载
- 伺服电机矢量控制原理详解 660次阅读
- 交流伺服电机与直流伺服电机的区别 631次阅读
- 浅谈伺服电机的控制模式 781次阅读
- 总线伺服电机的回零控制方法 2771次阅读
- 基于CAN总线的伺服电机通信控制 6642次阅读
- PLC使用脉冲方式控制伺服电机 1.8w次阅读
- 伺服电机的两种控制模式 1.6w次阅读
- 运动控制器控制伺服电机采用的指令和伺服电机调试的6个步骤说明 1.1w次阅读
- 什么是伺服电机? 伺服电机详解 19.1w次阅读
- PLC如何控制伺服电机 8053次阅读
- PLC在伺服电机中的应用 6026次阅读
- 一般的伺服电机多少钱_松下伺服电机价格 5.5w次阅读
- 【PPT教程】伺服电机及其控制原理详解 3.6w次阅读
- 伺服电机控制能否代替步进电机控制,交流伺服电机与步进电机的区别差异 3791次阅读
- 直流伺服电机调速控制系统解析,直流伺服电机的调速控制方式 7944次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1Keysight B1500A 半导体器件分析仪用户手册、说明书 (中文)
- 19.00 MB | 4次下载 | 免费
- 2使用TL431设计电源
- 0.67 MB | 2次下载 | 免费
- 3BT134双向可控硅手册
- 1.74 MB | 2次下载 | 1 积分
- 4一种新型高效率的服务器电源系统
- 0.85 MB | 1次下载 | 1 积分
- 5LabVIEW环形控件
- 0.01 MB | 1次下载 | 1 积分
- 6PR735,使用UCC28060的600W交错式PFC转换器
- 540.03KB | 1次下载 | 免费
- 751单片机核心板原理图
- 0.12 MB | 1次下载 | 5 积分
- 8BP2879DB支持调光调灭的非隔离低 PF LED 驱动器
- 1.44 MB | 1次下载 | 免费
本月
- 1开关电源设计原理手册
- 1.83 MB | 52次下载 | 免费
- 2FS5080E 5V升压充电两串锂电池充电管理IC中文手册
- 8.45 MB | 23次下载 | 免费
- 3DMT0660数字万用表产品说明书
- 0.70 MB | 13次下载 | 免费
- 4UC3842/3/4/5电源管理芯片中文手册
- 1.75 MB | 12次下载 | 免费
- 5ST7789V2单芯片控制器/驱动器英文手册
- 3.07 MB | 11次下载 | 1 积分
- 6TPS54202H降压转换器评估模块用户指南
- 1.02MB | 8次下载 | 免费
- 7STM32F101x8/STM32F101xB手册
- 1.69 MB | 8次下载 | 1 积分
- 8基于MSP430FR6043的超声波气体流量计快速入门指南
- 2.26MB | 7次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935119次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420061次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233084次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191367次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183335次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81581次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73807次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65987次下载 | 10 积分





 工商网监
工商网监
评论