 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍:
由于 COVID-19,我们将机器人命名为(英雄)的原因。如今,即使设备齐全或有盖,人们仍冒着生命危险对场所进行消毒。不知何故,他们被病毒感染了,但对我们来说,他们是真正的拯救生命的英雄。所以我们决定不再让人类参与,而是在现场引入机器人来挽救我们宝贵的生命。所以我们将我们的机器人命名为 UV Hero。
机器人的目的:
该机器人的目的是对办公室、医院、厕所、机场等污染区域进行消毒。它可以在没有任何人参与的情况下使用,还可以对门把手、开关板、椅子、桌子等特定区域进行消毒。
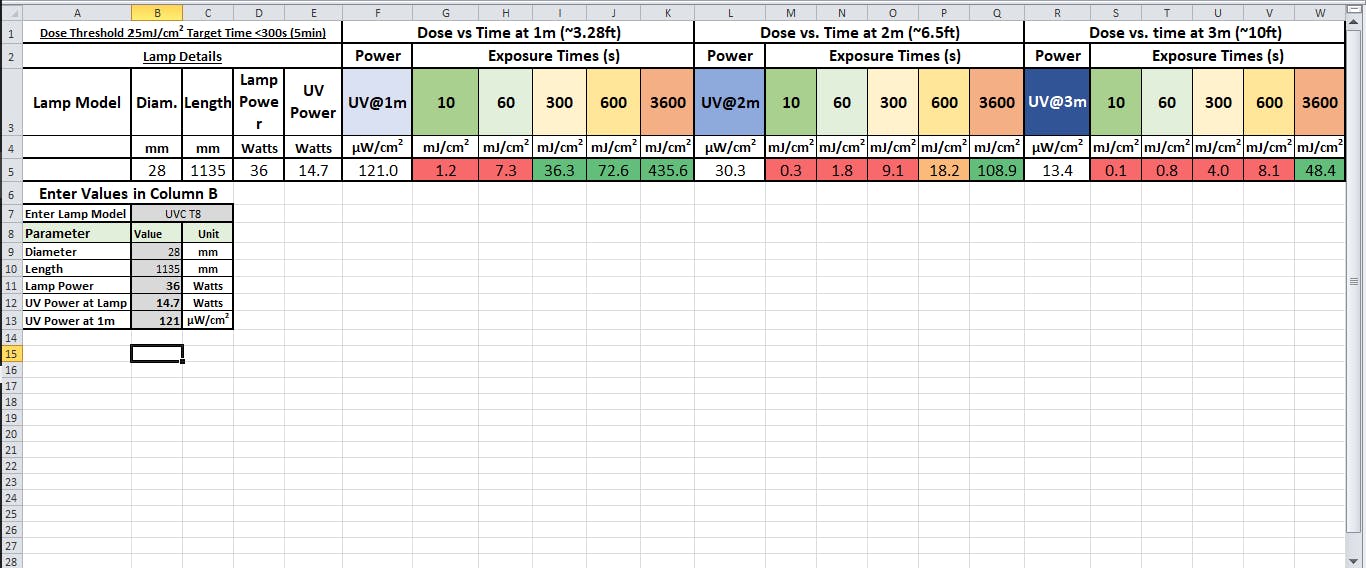
我们将机器人设计为大约一英尺半的区域,因为大多数门和摊位都在两英尺宽和 6.5 英尺高。
建造:
如何构建:
所需工具:
- 钻孔机
- 扳手
- 螺丝刀
- 胶枪
- 铝点焊机
- 拼图
- 卷尺
- 橡胶粘合剂
- 环氧树脂
所需组件:
购买物料清单中列出的所有产品。
脚步
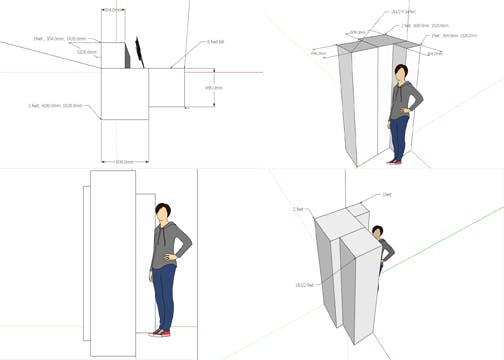
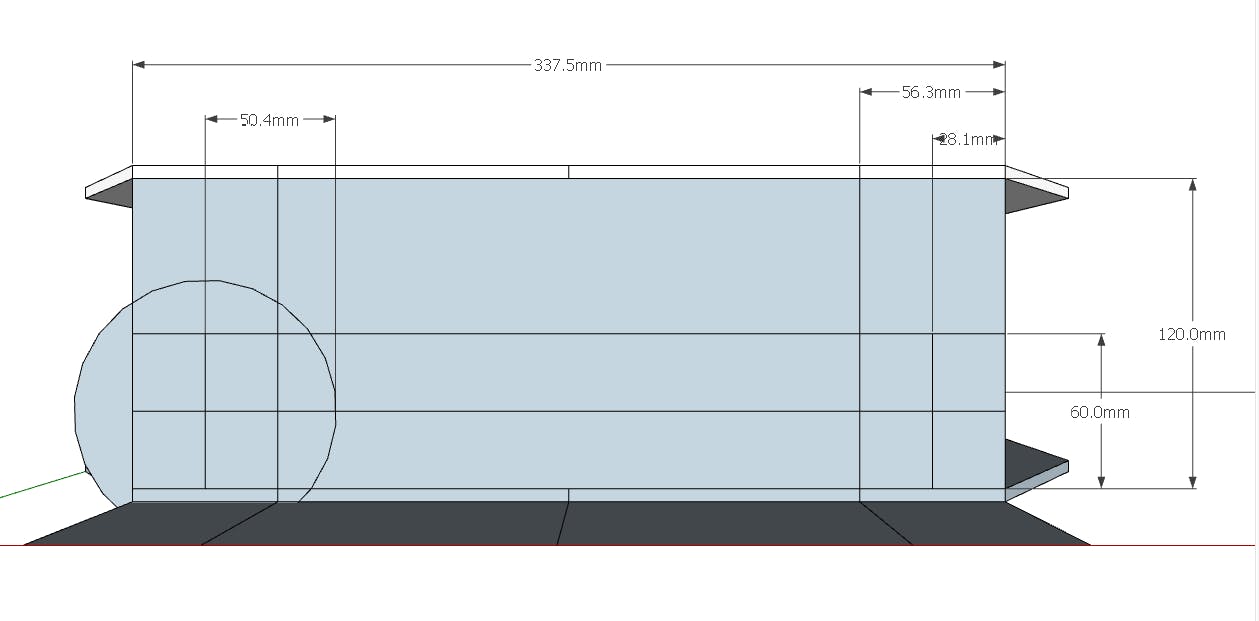
制作机器人底座
- 根据设计使用曲线锯切割 5mm 厚的铝板。
- 使用 tig 或弧焊机焊接所有侧面并按照图表钻孔。
制作轮子
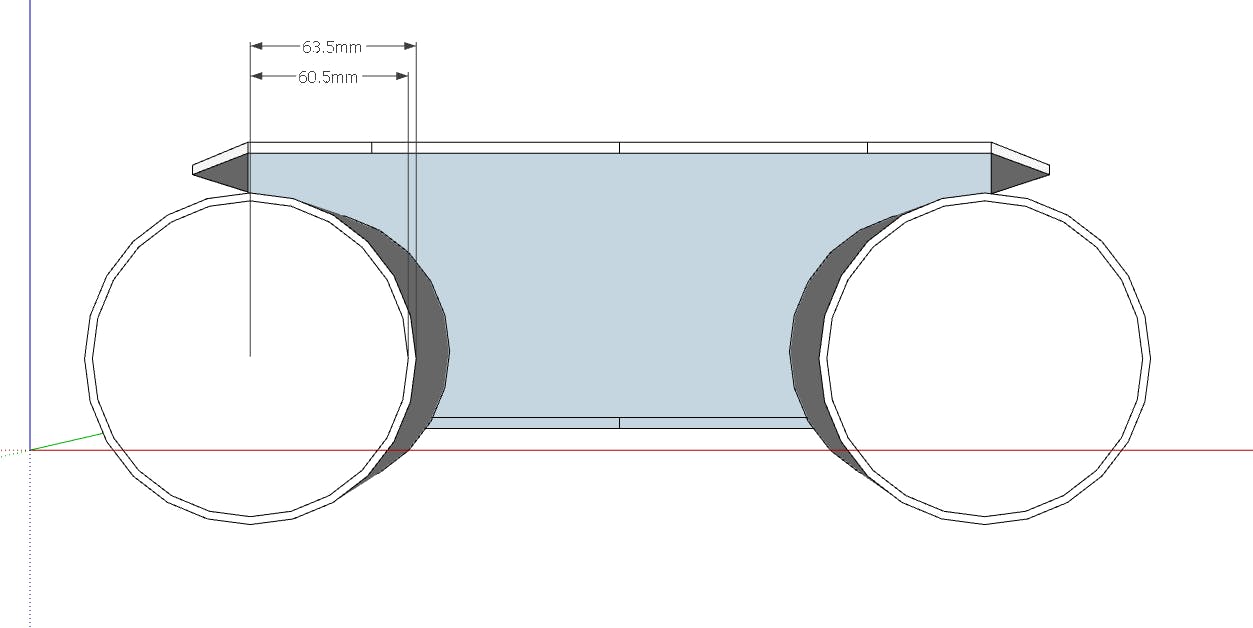
- 根据图表切割 5' 4 PVC 管。
- 关闭管子的两端做轮子并打孔以“连接电机”。
- 将另外两个轮子连接到轴承上,并将其连接到踏板杆上以自由移动。
- 切割橡胶板并使用橡胶粘合剂将其连接到车轮上。
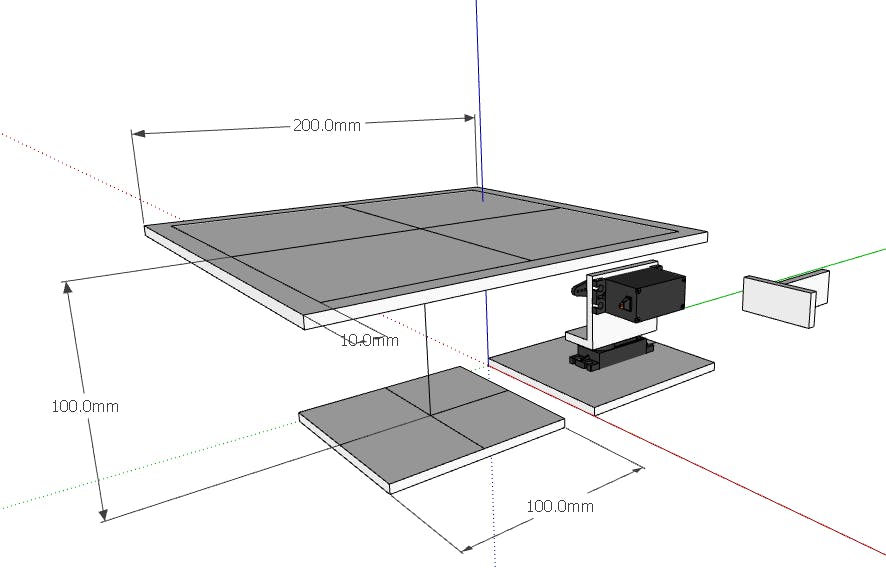
安装 UVC t8 灯
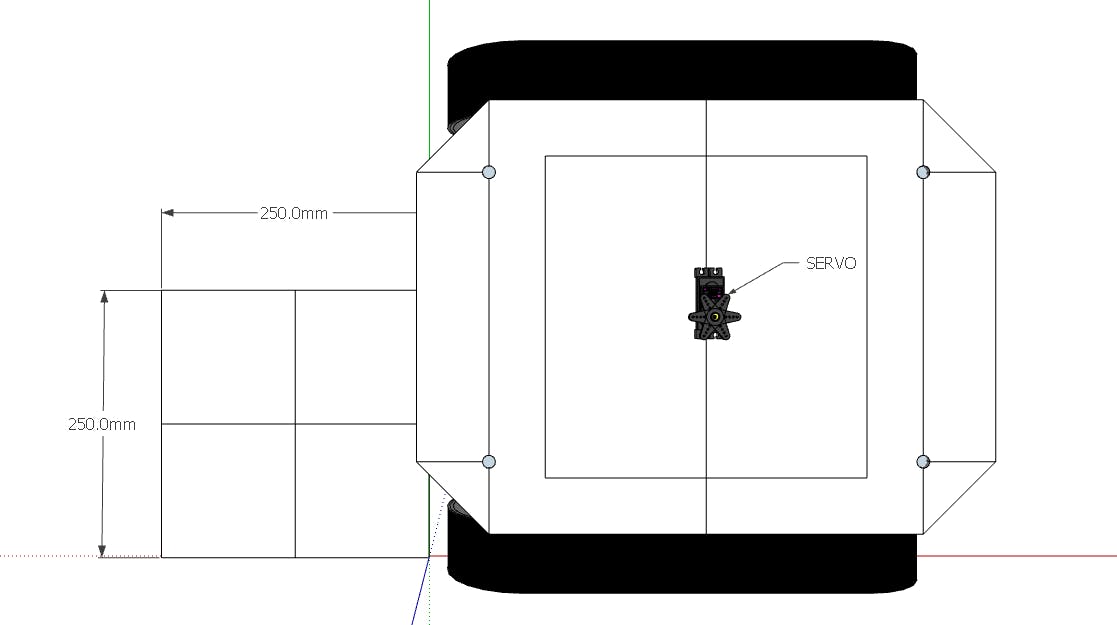
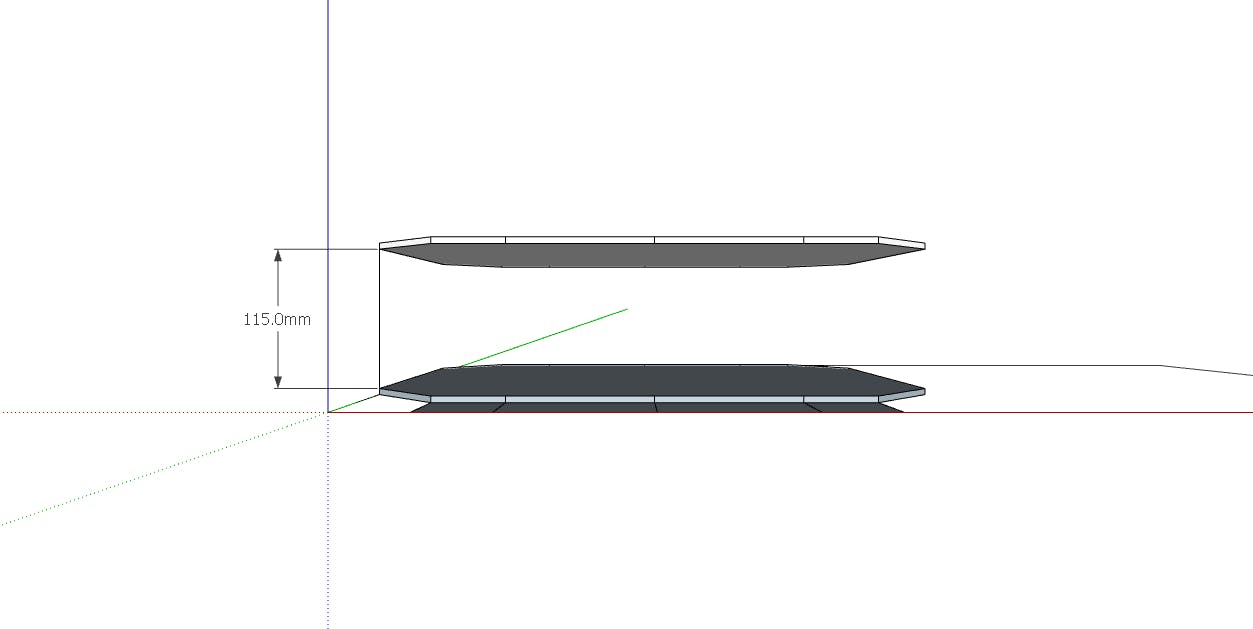
- 将基础伺服连接到机器人的底座上,切割两个 255mm 直径的圆形片和一个 250mm 的圆形片
- 将伺服轴连接到 250mm 件
- 使用塑料外壳制作半英尺垫片并安装 uvc 管灯。
- 取 5 英尺长的塑料片,剪下 1 英尺宽的塑料片,然后将反光片粘贴在塑料片上。
- 用塑料片做保护盖,盖在上面。
制作一个uvc频闪灯并安装伺服gymbal
- 为了使一个gymbal在x和y轴上连接两个伺服器,相应地在构建铝制外壳的顶部按照图表进行频闪灯,并在外壳内粘贴反光片。
- 现在在外壳中间焊接 6 格 uv-c led。
- 并将其与伺服连接。
安装底座灯
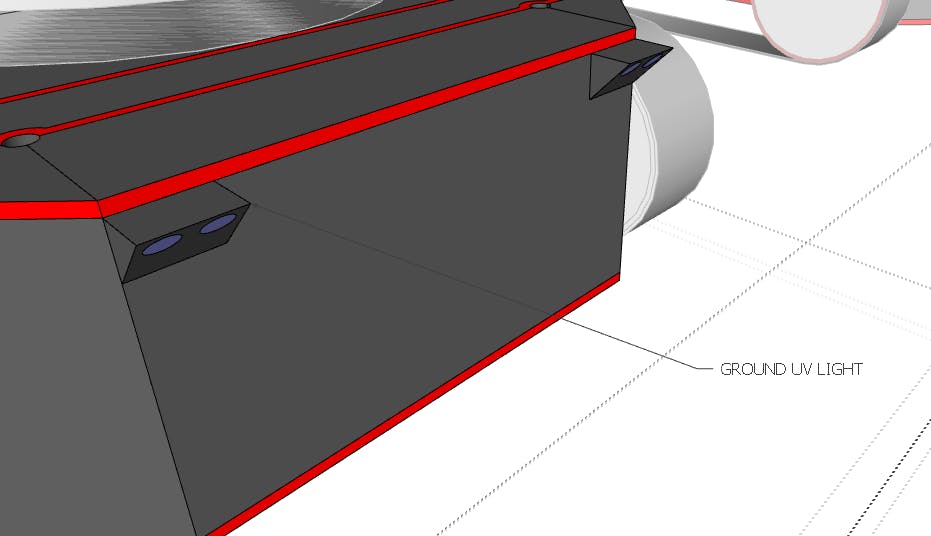
- 最后,以 45 度角安装 uv-c 基础灯。
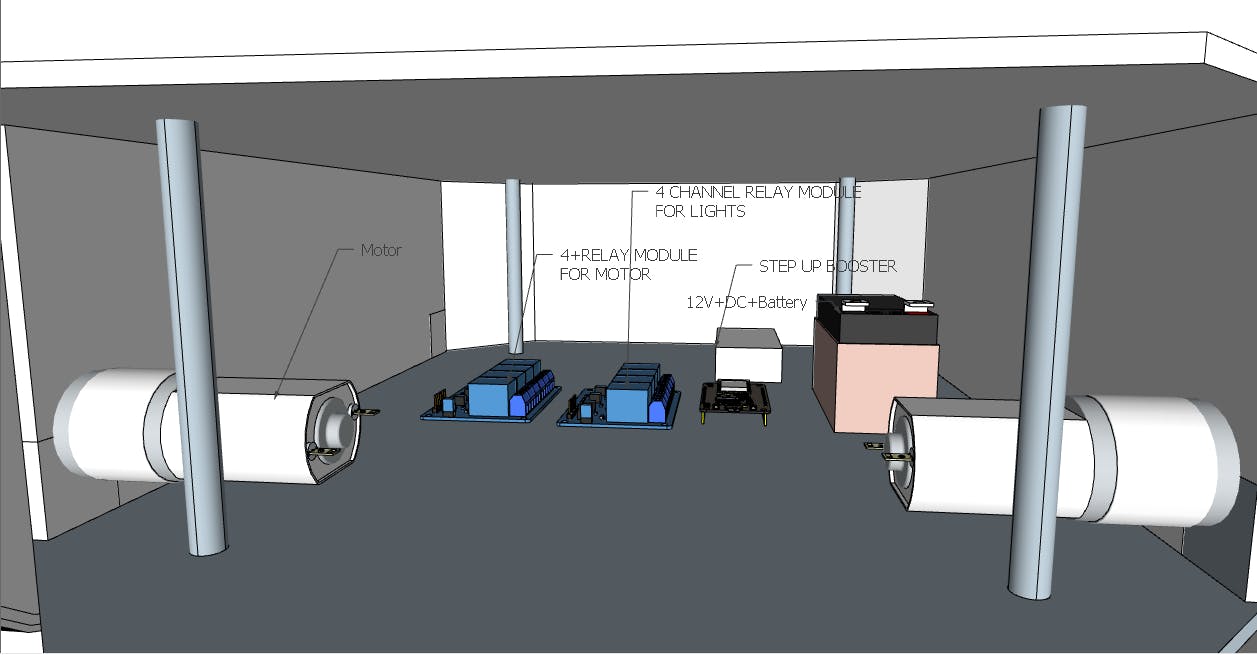
内部零件:
组装机器人图像:

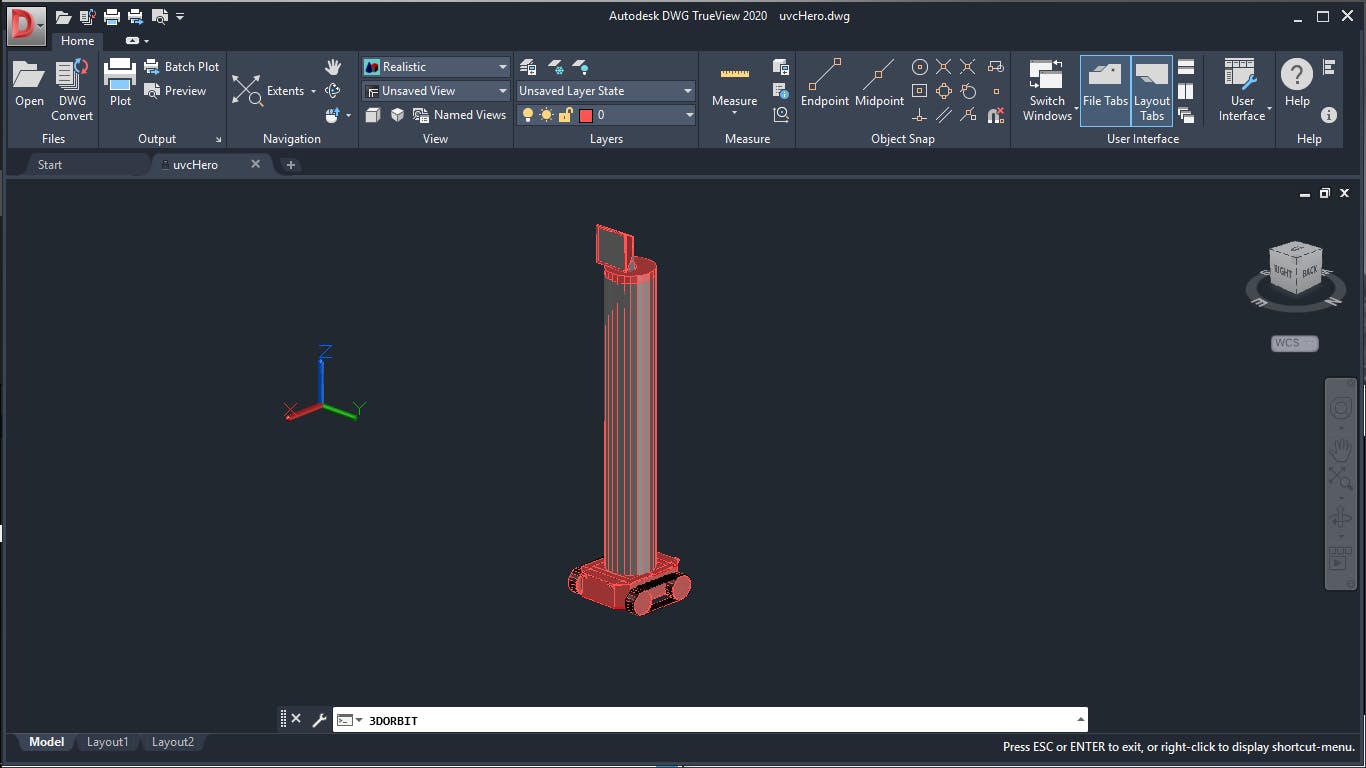
CAD设计:
在 MIT 应用程序发明者中制作应用程序:
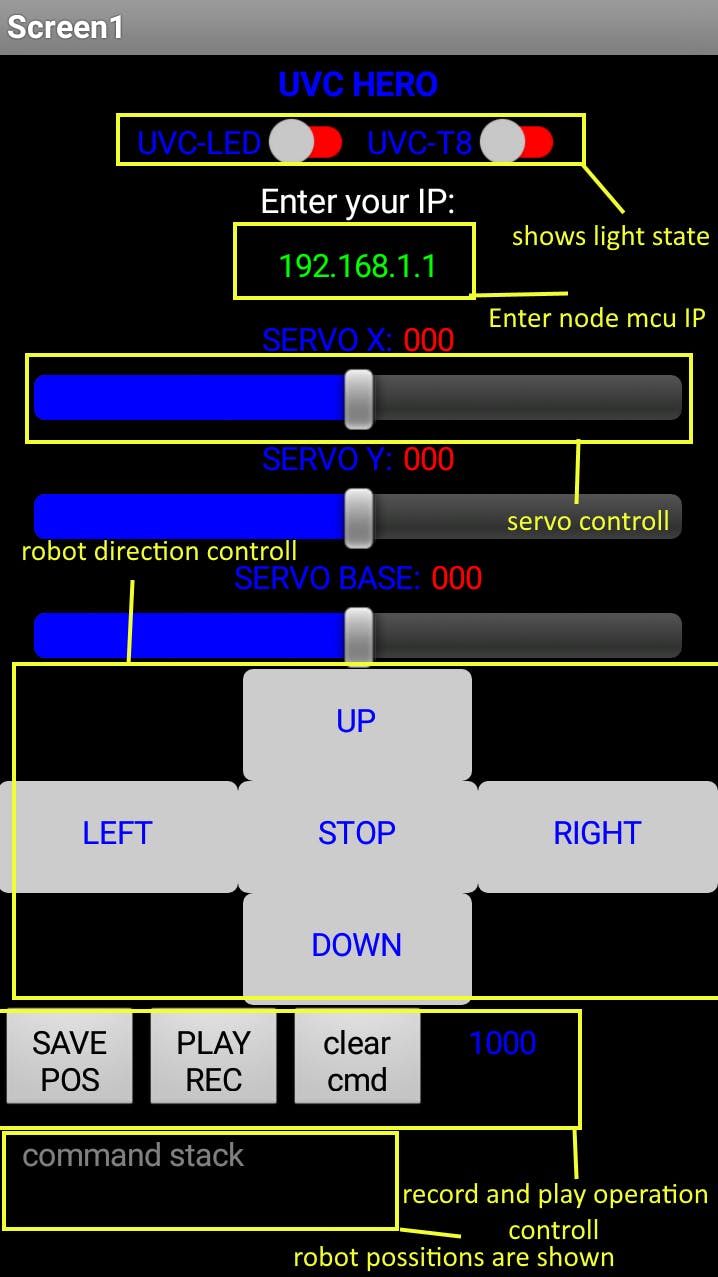
- 这个 android 应用程序用于通过 WIFI 控制机器人。
- 首先我们需要输入机器人的IP地址,机器人将连接到网络
- 当我们访问用户界面时,命令被发送到节点 mcu Bord,然后机器人将移动。
- 现在在开始控球时移动机器人并开始保存下一次控球
- 记录房间布局的每一个财产,现在所有财产都保存在一个文本文件中。
- 将机器人移动到起始点并单击播放按钮播放记录的财产
- 完成后,机器人和灯会关闭
- 该应用程序指示安全灯状态。
电路和连接:
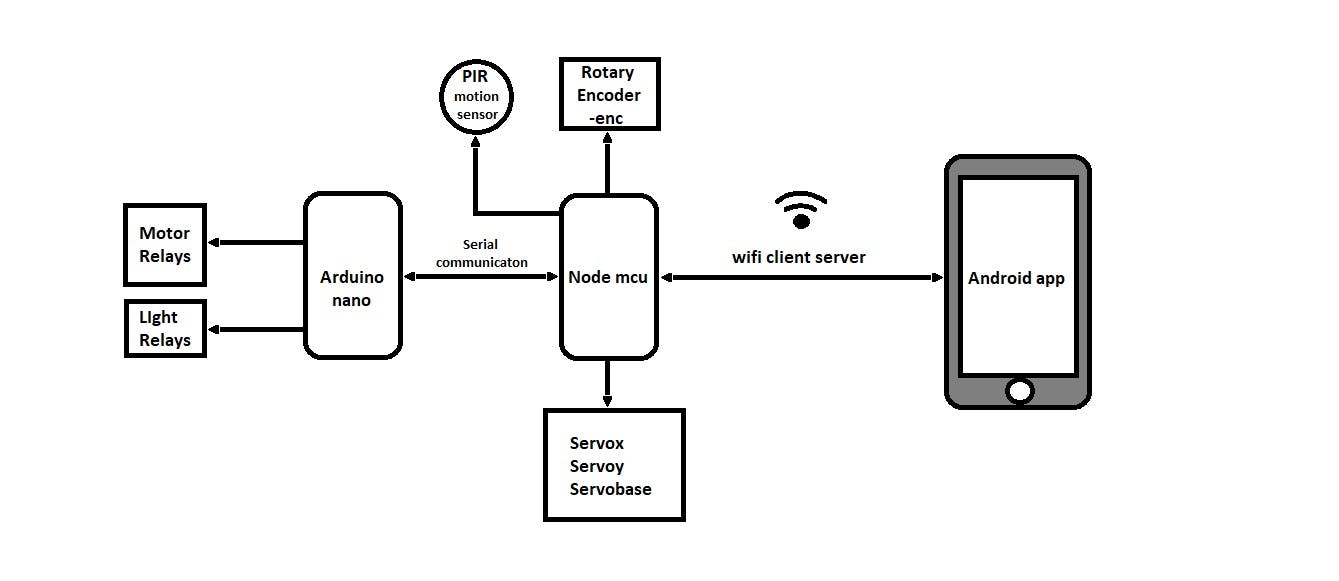
- 借助示意图连接所有电子设备
解释 :
我们的动机是在没有任何人参与的情况下对整个房间进行消毒。所以我们决定打造一款性价比高的遥控机器人,命名为(UV Hero)。该机器人可通过WIFI控制距离收容区约5-6米。它具有对特定区域进行消毒的特殊功能,例如门把手、水龙头和开关等。通过使用 UV-C LED 频闪灯,它可以在任何方向聚焦,其他功能是通过可旋转的 UV-C T8 灯对物体和墙壁进行消毒,然后是用于地板消毒的基础 UV-C LED。在我们的项目中,机器人可以记录房间的布局并稍后进行操作。通过使用这种方法,我们可以在需要时对房间进行消毒,这使我们的机器人用户友好。为安全起见,运动检测器(PIR 传感器)安装在 UV-C T8 灯附近,如果有人靠近机器人,它将关闭。
程序:
打开 Arduino IDE 连接 Arduino nano 板选择端口并上传给定的草图。完成后,连接节点 mcu 并将所需的库安装到 IDE,在草图上输入您的 SSID 和密码,然后上传。一旦它上传打开串行监视器获取 IP 地址并在 android 应用程序中输入它。
保存位置的算法:
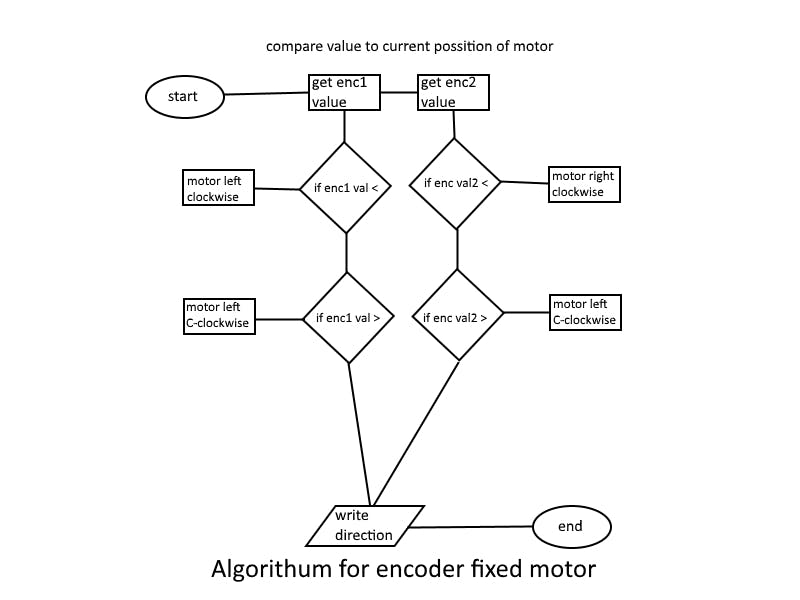
当我们按保存时,起始位置将被保存,然后将机器人移动到下一个位置,当我们完成保存位置时按保存,它们将存储在文本文件中。
当我们按下播放按钮时,保存的位置被发送到节点 mcu
节点 mcu 读取该位置并使用上述算法进行处理
在职的:
一旦节点 mcu 获得该值,它将与电机的当前位置进行比较并运行电机以达到该值。
同样的算法用于记录伺服。
计算 uv-c 杀灭剂量
优点:
- 没有人类参与该领域。
- 没有液体消毒剂。
- 便于使用。
- 录制和播放功能使机器人无忧无虑。
- 可以在任何地方使用。
- 经济有效的消毒方法。
缺点:
- 机器人只在室内工作。
- 它不是完全自动化的。
- 机动过程中不得发现障碍物。
安全:
- 如果机器人在工作时检测到任何运动,它将停止。
- uvc 灯泡由外壳固定。
- 该应用程序将指示 uvc 是打开还是关闭。
- YolkaBot机器人开源分享
- 检测机器人开源分享
- Arduino机器人开源
- 坦克机器人开源分享
- 扫地机器人开源资料 44次下载
- 机器人守卫开源分享
- 伺服机器人开源分享
- 堆肥机器人开源分享
- 机器人开源案例
- 小臂机器人开源分享
- Arduino机器人开源分享
- 助理机器人开源分享
- 简单的机器人开源分享
- 机器人开源项目
- 基于DSP和PC的农业机器人控制系统 18次下载
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 562次阅读
- 机器人技术中常用的路径规划算法的开源库 1188次阅读
- 铸造机器人是什么?选择工业机器人应该考虑的方向 1186次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2236次阅读
- dfrobotSparki机器人套装简介 2207次阅读
- 工业机器人技术应用 5343次阅读
- 工业机器人编程入门_工业机器人的编程要求 9787次阅读
- 医用机器人的定义_医用机器人发展 3257次阅读
- 医用机器人的功能_医用机器人分类 2462次阅读
- 机器人控制器有哪些类型_机器人控制器发展 1.2w次阅读
- 协作机器人的起源_为什么需要协作机器人 8322次阅读
- 机器视觉的机器人取代四台传统的火焰处理机器人 3370次阅读
- 如何区分机器人、协作机器人和移动机器人? 7029次阅读
- 软体机器人 前所未见的机器人 3770次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.5w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论