 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
“我——大人,这——不可能找到那艘船。这不在我们的范围内。” – 努特枪雷
我们最近搬进了新房子,一如既往,首先要解决的问题是在车库中找到最佳的停车位。理想情况下,我们希望将汽车停在尽可能靠近车库门的地方,从而在汽车前部和车库后墙之间留出最大的自由空间。
我和一些朋友讨论了各种解决方案,普遍认为旧的“绳子上的球”技术是解决这个问题的首选方法。对于那些没有见过这种古老做法的人来说,它涉及用一根悬挂在车库天花板上的绳子悬挂一个网球。一旦汽车被移动到最佳位置,绳子的长度就会永久调整,使网球刚好接触到汽车的前挡风玻璃。因此,无论何时您开车进入车库,只要网球碰到挡风玻璃,您就可以停下来。确实古风……
那根本不行。我心想,“自我,我们需要用小工具来解决这个问题。” 我们不能让网球挂在绳子上,破坏车库的原始秩序。
我决定使用超声波换能器,它基本上是一种基于声音的测距仪。我最初考虑的是激光/光源,但研究让我相信这对近距离的汽车来说可能会有一些麻烦。不过对我来说幸运的是,基于声音的超声波换能器可以解决问题。
为了节省时间,因为我需要快速组装设备,所以我选择了一个预制的超声波换能器电路,而不是自己构建一个。我可能会在某天为练习构建自己的,但最近时间有点短。
第1部分
电路相当简单,它有一个+5V 引脚、一个接地引脚和一个信号引脚。您只需在信号引脚上生成一个脉冲,然后测量返回脉冲的脉冲宽度即可确定距离。这个设备显然适用于 2cm 到 3m 的范围,这很好地满足了我的需要。
我决定将范围显示为一系列超亮 LED。我在电路中内置了 6 个 LED,5 个红色和 1 个绿色,排列为 Red Red Red Red Green Red。我本可以使用多色 LED 来做到这一点,但我更喜欢这种方法。
这就是 LED 响应汽车范围的方式,随着汽车越来越近,更多的红灯亮起。一旦汽车处于最佳范围内,红灯熄灭,绿灯亮起。如果汽车开得太远(离墙太近),则绿灯熄灭,最后的红灯亮起。
_ _ _ _ _ _ = Car greater than 3m from wall.
r _ _ _ _ _ = Car 3m from wall.
r r _ _ _ _ = Car 2m from wall.
r r r _ _ _ = Car 1.5m from wall.
r r r r _ _ = Car 1m from wall.
_ _ _ _ g _ = Car 45cm from wall.
_ _ _ _ _ r = Car 35cm from wall.
这是我构建的电路。
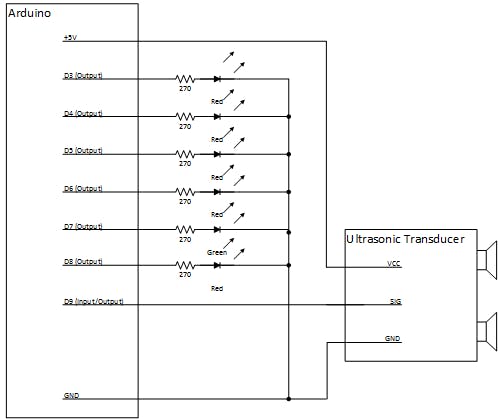
我使用标准的 Arduino Uno Rev 3 开发板,因为我不需要网络功能。
第2部分
这是基本的控制代码。我使代码保持简单,以仅解决此功能所需的逻辑。我构建的实际设备使用 RF 接收器从我的车库门控制器电路中获取车库门状态消息。我这样做是为了在车库门关闭时关闭测距仪电路,然后在车库门打开时打开电路。
/***************************************************************/
/* */
/* Garage Controller Range v2.0 */
/* */
/***************************************************************/
#include
#define SF(x) String(F(x))
#define CF(x) String(F(x)).c_str()
#define RANGE_MIN 35
#define RANGE_MAX 39
#define RANGE_1 49
#define RANGE_2 64
#define RANGE_3 84
#define RANGE_4 200
int iPinRed1 = 3;
int iPinRed2 = 4;
int iPinRed3 = 5;
int iPinRed4 = 6;
int iPinGreen1 = 7;
int iPinRed5 = 8;
int iPinRange = 9;
/***************************************************************/
/* Function: setup */
/***************************************************************/
void setup()
{
Serial.begin(9600);
Serial.println(SF("setup()"));
pinMode(iPinRed1, OUTPUT);
pinMode(iPinRed2, OUTPUT);
pinMode(iPinRed3, OUTPUT);
pinMode(iPinRed4, OUTPUT);
pinMode(iPinGreen1, OUTPUT);
pinMode(iPinRed5, OUTPUT);
pinMode(iPinRange, OUTPUT);
}
/***************************************************************/
/* Function: loop */
/***************************************************************/
void loop()
{
long lDuration = 0, lCM = 0;
// 2 Microsecond Clear + 5 Microsecond Pulse
pinMode(iPinRange, OUTPUT);
digitalWrite(iPinRange, LOW);
delayMicroseconds(2);
digitalWrite(iPinRange, HIGH);
delayMicroseconds(5);
digitalWrite(iPinRange, LOW);
// Get Return Pulse
pinMode(iPinRange, INPUT);
lDuration = pulseIn(iPinRange, HIGH);
lCM = ConvertMSToCM(lDuration);
Serial.println("Distance: " + String(lCM) + " cm");
// Too Close
if (lCM < RANGE_MIN)
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, HIGH);
}
// Perfect
else if (lCM >= RANGE_MIN & lCM < RANGE_MAX)
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, HIGH);
digitalWrite(iPinRed5, LOW);
}
// Range 1
else if (lCM >= RANGE_MAX & lCM < RANGE_1)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, HIGH);
digitalWrite(iPinRed3, HIGH);
digitalWrite(iPinRed4, HIGH);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 2
else if (lCM >= RANGE_1 & lCM < RANGE_2)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, HIGH);
digitalWrite(iPinRed3, HIGH);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 3
else if (lCM >= RANGE_2 & lCM < RANGE_3)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, HIGH);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 4
else if (lCM >= RANGE_3 & lCM < RANGE_4)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 5
else if (lCM >= RANGE_4)
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
else
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
delay(50);
}
/***************************************************************/
/* Function: ConvertMSToCM */
/***************************************************************/
long ConvertMSToCM(long lMicroSeconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled. - Arduino Site
return lMicroSeconds / 29 / 2;
}
上面的代码有一个问题。虽然它有效,但我们假设汽车停在离墙 34.5 厘米的地方。测距仪可以在将汽车位置记录为 34 厘米和 35 厘米之间摆动。这意味着您会看到 LED 在绿色(完美)和红色(太接近)之间波动。有几种方法可以解决这个问题,但其中之一是不使用单个阈值在状态之间切换。在上面的示例中,RANGE_MIN (35cm) 用作“太靠近墙壁”状态和“完美范围”状态之间的阈值。
第 3 部分
我们可以做的是创建两个阈值。当范围减小时使用一次阈值,当范围增加时使用一个阈值。因此当小车距离墙壁34cm时,状态变为“太近”,但直到距离超过36cm时才会变回“perfect”。这样,如果范围恰好在阈值上,它将保持在其中一种状态,直到范围发生显着变化足以将其移回下一个状态。如果您需要示例,请告诉我,我可以为此添加一个代码片段。
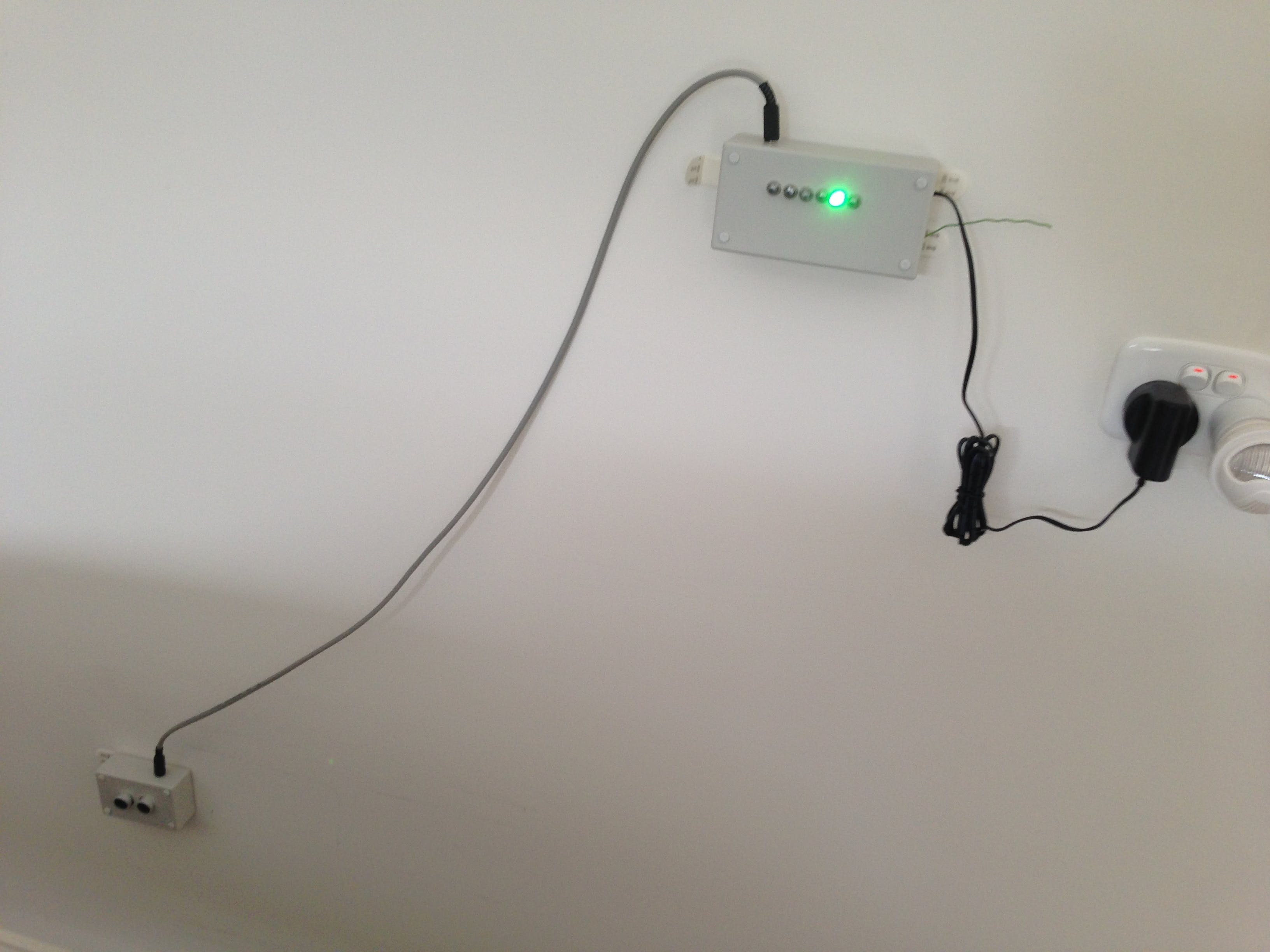
最后一个要解决的问题是组装。对我来说,我需要将测距仪放在车牌/保险杠的高度。然而,我希望灯在墙上更高,这样司机就可以看到它们。我决定将测距仪电路放在一个组件中,而将 Arduino/灯放在另一个组件中。然后我为每个组件添加了一个插座,并在它们之间连接了一根电缆来完成电路。事后看来,我应该把 Arduino 组件的插座放在组件的底部,但是你能做什么……
我用您可以买到的 3M 挂钩上的胶带将它们都固定在墙上。您还可以看到从一侧伸出的一条绿色小线——这是用于接收车库门状态的天线。我在这篇博文中介绍了用于 RF 通信的电路。
第 4 部分
根据用例,您可以使用此电路做更多的事情。可以添加多个测距仪,这样您就可以用传感器覆盖两个(或更多)汽车点。您可以在更高的位置添加第二个传感器,这样如果您将它用于多辆汽车,您可以通过检测两个传感器之间的距离差异(为您提供汽车的形状)来检测哪辆汽车(以及首选范围)。如果你真的很热衷,你也可以用它把你的车停在正确的地方,但这需要建造第二个稍微复杂一点的电路……
〜迈克
- Arduino指纹传感器教程分享
- 车辆停车传感器开源设计
- DIY停车雷达传感器
- 车库停车灯开源硬件
- 使用Arduino制作停车传感器
- 停车传感器助手开源分享
- 带有Arduino的停车传感器
- 灰尘传感器作为输入到Arduino兼容板的输入开源
- 基于stm32智能立体停车库项目
- PH 传感器说明书FOR Arduino 2.0免费下载 6次下载
- arduino声音传感器 模拟资料汇总 0次下载
- 可兼容Arduino的声音传感器模块LM386 5次下载
- Arduino雨滴传感器的使用示例代码免费下载 43次下载
- 基于WinCE的立体停车库管理系统的设计
- 汽车库、修车库、停车场设计防火规范 GB 50067-97
- 基于机智云的智能私家车库控制系统设计与实现 120次阅读
- 传感器的定义和分类 1179次阅读
- 基于红外传感器的停车场警卫电路图 2056次阅读
- 工业级智能停车系统设计方案 824次阅读
- 采用数字微波传感器和Arduino控制板实现人体探测系统 1995次阅读
- 采用数字微波传感器、继电器和Arduino控制板的自动光控系统 833次阅读
- 如何使用Arduino和LDR传感器实现LCD液晶屏亮度的自动调节 6529次阅读
- 如何使用Arduino创建停车门禁控制系统? 5060次阅读
- 采用PLC和Profibus现场总线实现立体停车库控制系统的设计 7219次阅读
- 声控传感器构成的防盗监听电路 3120次阅读
- dfrobot模拟灰度传感器简介 3128次阅读
- 德州仪器推出针对入口系统的毫米波传感器驱动解决方案 944次阅读
- 数字传感器和模拟传感器的区别 2.5w次阅读
- 基于无线传感器网络在停车场监控系统中的应用 1436次阅读
- 西门子Simatic S7-200 Smart PLC,让智能车库停车,不再难 3935次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论