 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
本文介绍了一种工程方法和实践方法,用于测量、量化和可视化来自远处的振动波。什么是振动波,为什么我们需要测量它们,下面将详细介绍。
对此有无穷无尽的应用,但有几个方便的例子是:知道是否有人在家,电机是否很快就会发生故障,或者是否发生地震及其震级,等等。提高振动意识有助于设计智能防盗系统,或在故障发生前预测故障等等。它还可以帮助您学习更多实用的东西并使用它,而不是像在学校或大学那样纯理论。
我们将测量从运行中的有刷直流电机的激励源传播的振动。这将为进一步探索和扩展其他来源提供背景。
为了实现我们的目标,有几种方法。一种是:获得一个 3 轴加速度计 IC,并开发一个 PCB,然后测量该轴上的 g 力,并通过 SPI 或 I2C 通知微控制器。有一些非常敏感的 IC 能够以高达 24 位的分辨率进行测量,并且需要大量的基础设施和开发才能正常运行,通常这些更适合工业或科学用途。这种方法的范围是使用更实惠、更易于使用的技术,这些技术也可以安装在机器人上并随身携带,并在需要时立即应用。
运载系统和研究平台采用了“KenjiX1”机器人和“Physalis Labs”的传导振动扫描探头。几乎所有类型的传感器和探头以及大多数 IC 和传感器都是根据 Pierre 和 Marie Curie 发现的压电效应制成的。
使用KenjiX1的探头使用方便,即使刹车,也可以轻松更换。有几种类型的探头可用,主要区别在于探头的几何形状,然后将其应用于表面,其设计方式可以与表面形成良好的接触,这样波浪就可以更轻松地穿过一个物体(表面)到另一个物体(探头)并引起微小位移。位移然后导致晶格内部的微变形,这就是探针的简要概念。
KenjiX1 机器人可以使用多种类型的探头。对于我们的测试,我将使用扁平探头(图 1)。它旨在用于平坦或玻璃状的表面、墙壁和属于该类别的所有东西,基本上是在所有平坦的东西上。它的远端有一个带臂的压电传感器,安装起来毫不费力。

图。1。带圆形扁平圆盘的导电探头。
用品和消耗品......
仪器、工具和用品:---------------------------------------- -
1. 带有终端程序(Putty 和 TeraTerm)的笔记本电脑(任何 Linux、MacOS 或 Windows 机器)。
2. KenjiX1 开源远程机器人平台振动测量探针(平面几何)来自http://physalislabs.org/
3. 用于数据评估的 OriginLab 软件。
5. 有刷直流电机。
让我们从每个步骤的简短描述开始:
· 安装终端软件(TeraTerm、Putty、Windows和 Xterm 或类似的 Linux)。在这里,我将使用 TeraTerm,因为我目前正在 Windows 机器上工作。但是你可以为你合适的机器选择你喜欢的终端软件。
· KenjiX1 平台,导电探针(平面)由“Physalis Labs”提供。
· 到OriginLab网站下载安装程序,然后从https://www.originlab.com/安装“OriginLab”软件。通常它是付费的,但您可以试用一个月。稍后您可以决定保留、删除或删除它。该软件与 Windows 机器更相关,
· 能够为上述任何电机供电的常规实验室电源都可以,或者只使用电池,请确保为电机使用正确的电压。
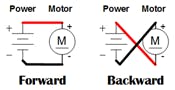
图 2。使用合适的电源为有刷直流电机接线。
· 从损坏的电子设备或其他类似设备中回收的有刷直流电机也是一种选择。确保电机和电源/电池的电压匹配,否则它不会运行,或者如果运行,将非常慢,如果电压低于规格,或者运行速度超快,如果超出规格太高。
这就是材料和工具……现在我们终于可以开始研究获取正在运行的有刷直流电机的振动曲线。
振动急剧下降
它们大量出现在我们周围和自然界中。因此,了解它们的来源和发生的原因至关重要。对振动的持续监测让人们意识到可能发生的地震和其他自然灾害。
另一方面,监测各种振动及其幅度(即振幅)有助于防止机械和复杂系统发生故障和停机,这些系统始终在线并在我们周围工作。在发电厂、工厂、生产线中,需要持续验证振动本底噪声。对于所有正在运行的硬件、机电和机械系统,要注意它们的磨损。它不仅可以帮助节省维护成本,还可以减少由于此类复杂硬件系统的意外故障而导致的痛苦停机时间,并导致进一步的问题。
通常这个主题在物理学和其他自然科学学科以及重数学方面有巨大的支持 (°_°)。在这里,我将跳过它并在实际应用程序中获得更多物理知识。
通常振动在两个域中测量,时间和频率。
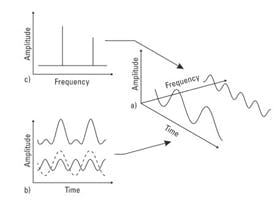
图 3。几个激励源的图形表示 c(振幅与频率)、b(振幅与时间)、a(振幅与频率和时间)。
如图(图 3)所示,激励源可以产生正弦波,具有较高或较低的频率,刚好或瞬间出现的尖峰。我们可以测量在两个域中传入的波:时间,这意味着效果/波随着时间的变化而被观察到(图 3.b.),以及频率,这意味着我们观察到效果/波产生的能量频率带宽(图 3.c.)。您需要应用傅里叶变换才能从 (Fig.3.b.) 移动到 (Fig.3.c.)。
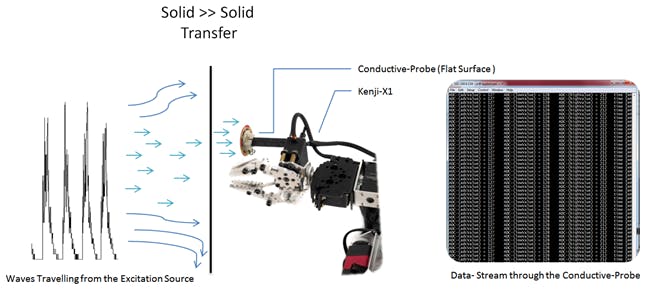
图 4。振动波从激发源通过固体传播到 KenjiX1 并在导电探针内部引起微位移的图示。
我创建了一个插图,说明来自激发源(人在键盘、锤子、直流电机等上打字……)的波如何从一个固体物体(墙壁、桌子、金属和楼梯)穿过物质(固体、液体、气体) ) 到另一个固体物体,它恰好与我们的导电探针接触。探头的平坦表面与波最强烈的介质产生接触,并使波能够触发强烈的微位移,即加速度(g 力),这是良好信号强度的先决条件。
此外,导电探针将信号定向到 KenjiX1 平台,在那里它由板载 CPU 注册,或进一步穿梭以进行处理。
为了远程测量振动,我使用了 Physalis Labs 的 KenjiX1 机器人平台。它确实是一个很棒的机器人开发开源平台,它弥补了工业机器人技术与制造商/修补匠级别小型机器人之间的差距。有关 KenjiX1 的更多信息,请访问http://physalislabs.org/projects/kenji/。
启动 KenjiX1…
到目前为止,我们已经完成了振动波的介绍和使用,然后我们简要介绍了完成任务的工具和材料,最后是一些理论和信息,它们将帮助我们了解幕后究竟发生了什么。
现在我们从前面的实际实验开始。启动您的笔记本电脑/PC 并连接到您可用的 WLAN 和 KenjiX1。

图 5。连接到您可用的 WLAN 和 KenjiX1。
使用位于机器人右侧的绿色发光开关(图 6.b.)为 KenjiX1 通电。请注意,绿色 LED 指示灯应亮起,以便能够为机器人供电。否则请检查充电电池是否已连接。开机完成后,机器人开始工作,您可以在您的网络列表中找到该名称。使用提供的密码和 IP 地址连接到它。

(一种)

(二)
图 6。启动 KenjiX1。
一旦通电,您将听到启动声音,并且您将被要求在 LCD 显示屏上“更新动力学参数”(图 6.a)。然后,您应该在笔记本电脑上打开终端程序并使用提供的 IP 地址启动 SSH 会话(图 7.a)。

(一种)
(二)
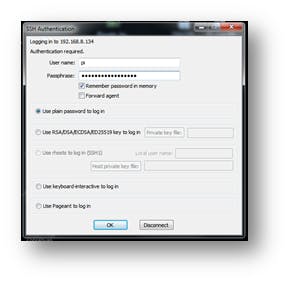
图 7。通过 SSH 远程连接到 KenjiX1。
输入“名称”和“密码”(图 7.b),然后将与 KenjiX1 的板载 SBC aka(Raspberry-Pi)建立成功连接(图 8.b)。输入用户名和密码,将启动到 Linux 控制台(图 8)。从现在开始,你几乎可以通过 KenjiX1 的板载 SBC 做任何事情。
图 8。KenjiX1 的 SBC 上的远程控制台。
我们应该在 KenjiX1 上建立最后一个通信节点,以充分发挥与机器人平台的交互功能。在控制台(图 8)中输入命令“ sudo minicom ”并按回车键。您会听到 KenjiX1 发出几声高音,外壳内出现文字。恭喜 (^_^) … 现在您可以访问 roboDrive 引擎了。从此时起,将与所有网络节点建立活动连接,除非您作为用户决定断开它们。
让我们熟悉一些 roboDrive 引擎的指令集。要查看(图 9.)中的“帮助/自述文件”信息,请输入大写字母“ H ”。在“ Run Control ”中我们可以配置平台的动力学参数:地速、塔台转速等。

图 9。远程更新动力学参数。
让我们输入大写字母“ O ”进入菜单。首先,您被要求“输入车辆地速”、“输入塔架旋转角速度”等(图 10.)如下。
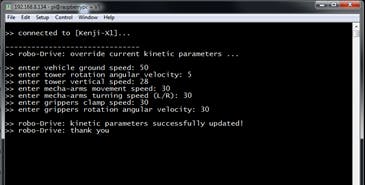
图 10。远程更新动力学参数。
让我们将所有需要的动力学参数输入到系统中,如图 10 所示:它们取值范围 (0 - 255)。这里 0 代表最快,255 代表最慢,我们以 8 位比例移动。
- 输入车辆地速 = 50
- 输入塔旋转角速度 = 5
- 输入塔垂直速度 = 25
- 输入机甲移动速度=30
- 输入机臂转动速度(L/R) = 30
- 输入夹持器夹紧速度 = 20
- 输入夹持器旋转角速度 = 10
完毕!
好的,让我们开始以最小速度(50)向前行驶,并让我们自己熟悉控制:

图 11。通过 PC 键盘控制。
如图(图 11.)所示,使用左侧的按键(W、A、S、D、X)可以控制机器人。它类似于 PC 游戏风格,您用左手四处移动,右手控制鼠标,进行四处查看。这几乎是一样的,你在 NumPad 上应用左键来移动,用右键来向上/向下环视等等。
测量直流电机的振动曲线
让我们从测量运行中的直流电机的振动曲线开始。我准备了一个测试装置(图 12),其中电机通过 Voltcraft 实验室电源以大约 10 伏的电压供电。

图 12。Faulhaber 有刷直流电机由实验室供电。电源(黑色)为 10V。
至于现在,电机一直在运转,轴在旋转。让我们考虑一下,作为一名工程师,我们有一项技术任务是远程测量有刷直流电机的振动曲线。
为了完成该任务:我们将通过网络连接到机器人,然后我们需要让机器人靠近研究对象,将机载机械手与导电探针接合并将其放置在有刷直流电机的框架上,这是某种程度上类似于当时航天飞机的飞行员使用机械手来捕捉丢失或发生故障的卫星,最后一步获取数据并对其进行评估。
让我们首先将 KenjiX1 开到测试装置所在的区域附近。就我而言,它位于大约 10 米外的设施中,因此我到达那里不会花太长时间。但也可能是您控制了所罗门群岛某处的 KenjiX1。我正在使用移动键(图 11)在空间中驾驶和导航,慢慢接近直流电机并在距离它约 30-40 厘米的地方停下(图 13)。

图 13。由实验室提供动力的 Faulhaber 齿轮直流电机。10V 的电源装置(黑色)。
是时候部署导电探针并连接到直流电机的金属框架了。因此,我从我的远程 PC 发送命令“V”以取消停放 Mecha-arms。它需要一两秒,现在两个机甲臂都处于未停放位置(状态 2),这最适合这项任务。KenjiX1 上通常有几种状态(1-4)可供用户使用,当然你也可以编写新的状态。
只有未停放和啮合的机械手不会与直流电机的框架形成合适的接触。我将从驾驶切换到机械手转向控制,并尝试左右转向左/右上/下以使其工作(图 14)。经过几次尝试,我设法用导电探针圆盘的平面接触到直流电机的框架。
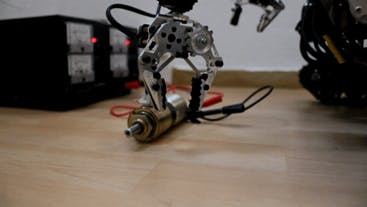
图 14。将未停放的机械臂定位在状态 2 中。
此时此刻,我已经设法与直流电机取得联系。现在,我只需进行微小的修正,并通过从左向右轻微移动来微调探头位置。机械臂已经将导电探针推向直流电机的框架,因此连接正确。

图 15。机械臂和导电探头的转向和微调。
至此,表面与表面的接触已经成功建立。现在是时候从导电探头请求数据并将其保存在我们板载 SBC 的存储卡中了。
这里有两个选项:您可以通过“ VNC Viewer ”软件或在控制台中通过“ TeraTerm ”软件(图 16.b)运行带有图形用户界面的 SBC(图 16.b),我更喜欢后者,但这只是个人喜好的问题,您可以通过两种方式进行相同的操作。

(一种)

(二)
图 16。左侧是 SBC 图形用户界面(VNC 查看器),右侧是控制台访问。
通过在 shell 中输入“ sudo minicom –C userdata_file ”命令,我要求系统通过 minicom 运行会话并将所有数据记录在“ userdata_file.txt ”文件中。在这里,我们只是告诉系统将我们的数据点(即将推出)保存到名为“ userdata_file.txt”的通用文本文件中。Minicom 初始屏幕打开(图 17.b)。

(一种)

(二)
图 17。在捕获模式下通过 minicom (a) 连接到 roboDrive Engine 控制台。
现在整理工作已经完成,我们可以从导电探针请求 10K 数据点,该探针目前正在测量运行中的直流电机产生的振动。

(一种)
(二)
图 18。请求将 10k 数据点流式传输给我们并保存在船上。
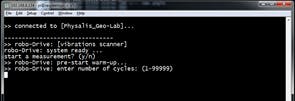
通过键入“ V ”启动数据流以运行“扫描仪设置”(图 17.a)。它将出现在 shell 中(图 18.b),输入“ y ”进行确认,然后输入所需的循环次数:“ 10000 ”,然后按“ enter ”。一按回车键,您就会看到数据流直接在 shell 中爆发。那是发送给我们并保存在船上的实时数据。随着时间的推移,正在注册三种类型的数据点。实际幅度、最低幅度(阈值)和最高幅度(阈值)。我们在时域中进行测量,因此我们在最右侧的列中看到了“时间 [ms] ”值。好的!....
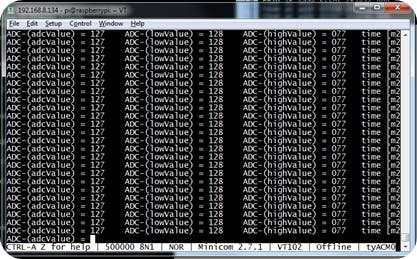
图 19。随着时间的推移,来自导电探针的数据流。
如上所述,导电探针正在向我们发送请求的测量周期量。至于现在,我们可以放松一下,喝杯咖啡。根据您请求的测量周期数,时间可以更长或更短,因此在一分钟后,流式传输结束并显示一条消息“扫描完成”。
但是所有这些原始数字和神秘的外观并不是我们所希望的。我想拥有一些我们可以以图形方式查看的东西会更好,并且可能与其他人共享或在报告中共享。
好的,如果你还记得,在开始数据流之前,我们要求系统捕获并记录我们与 KenjiX1 的交互,并将其保存在名为“userdata_file.txt”的文件中,该文件现在位于 KenjiX1 的板载 SBC 存储卡中。
设置数据分发
让我们将该数据文件传输到我们当前所在的 PC,或者您现在居住的“KenjiX1 的操作员”。在我的电脑上,我可以通过在 Windows PowerShell 中输入来实现
“ pscp user@192.168.8.134 : home/pi/userdata_file userdata_file.txt ”命令
请注意,您应该输入为 KenjiX1 的板载 SBC 提供的密码。在我的示例中,该文件将被复制到“ D:\Users\Arhitect ”文件夹,并在您的 PC 上,具体取决于您的路径。在 PowerShell 中,通过路径所在的“ pwd ”命令检查它。
请安装“ putty ”软件以在 PowerShell中使用“ pscp ”又名“putty secure copy ”命令等。https://documentation.help/PuTTY/pscp-usage.html

图 20。获取通过 PowerShell 通过网络发送给我们的测量数据。
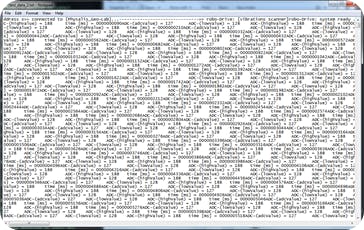
该文件已远程复制到我的 PC,位于目录“ D:\Users\Arhitect ”中。由于我们将工作环境从Linux换成了Windows,如果打开这个文本文件,会显得“模糊”(图21.a.)。
(一种)

(二)
图 21。使用 Notepad++ 更改 EOL 终止。
我们应该对 Windows 机器进行“ EOL ”修正。在上下文菜单中,单击“使用 Notepad++ 编辑”,如果您没有 Notepad++,只需从此处获取它https://notepad-plus-plus.org/downloads/。
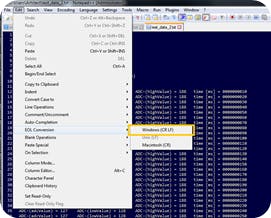
图 22。将 EOL 转换更改为 Windows(CR LF)。
单击以在 Notepad++ 中编辑文件,当其打开时,在程序中,转到“菜单”,然后“编辑”,然后“ EOL 转换”,然后点击“ Windows(CR LF) ”并通过“ CTRL-S ”保存文件并关闭记事本++。这样,我们将“行尾”终止更改为 Windows 样式。如果我们现在打开文件,它看起来类似于(图 19.)数据流。
可视化测量数据
有几种方法可以可视化测量数据,并且它们都以自己的方式很好地实现。归根结底,如何可视化数据取决于您。我选择了 OriginLab Pro。它确实是一款非常棒的软件,已经存在了很长时间。特别是如果你和科学家一起工作过,你可能已经遇到过,因为它在那些圈子里真的很受欢迎。
我们将从在 PC 上运行该软件开始,通常它会打开一本新的空书
图 23。在 PC 上运行 OriginLab Pro 软件。
我将导入我们复制到我的 PC的“ userdata_file.txt ”。OriginLab 在“菜单”和“文件”部分下有一个导入向导。首先在一个空的数据簿上单击一次并激活它,然后去导入并将文件导入为“single ASCII”,或者如果您通过“single ASCII”导入数据时遇到问题,也可以尝试“导入向导”。
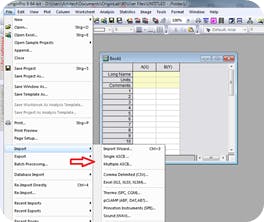
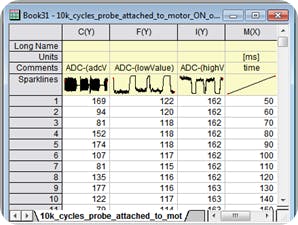
图 24。在 PC 上运行 OriginLab Pro 软件。
“导入向导”为您提供了更多操作选项,您可以更改“分隔符”名称等内容。您可以尝试各种场景以找到最令您满意的最佳选择。最终在成功导入后,您几乎可以在我们导入的每一列的顶部看到一些小缩略图。
每列在 OriginLab 软件中都有其专用名称,因此列 C(Y)、F(Y)、I(Y)、M(X) 是我们导电探头的 3 倍振幅,正如您还记得我们在时域中工作,因此最后一个是时间。您应该明确告诉程序哪些轴应该绘制为 X 轴,哪些轴应该绘制为 Y 轴。我会告诉程序绘制依赖关系
这意味着包含所有时间值的“M(X)”数据集将被绘制为 X 轴和所有其他“ C(Y)、F(Y)、I(Y) ”,它们包含振动波振幅作为 Y 轴。为了更好地概述,我将 M(X) 数据集除以 1000 以获得以秒为单位的时间。否则 X 轴的值太高。
我们总共将在一张图中绘制 4 个数据集:
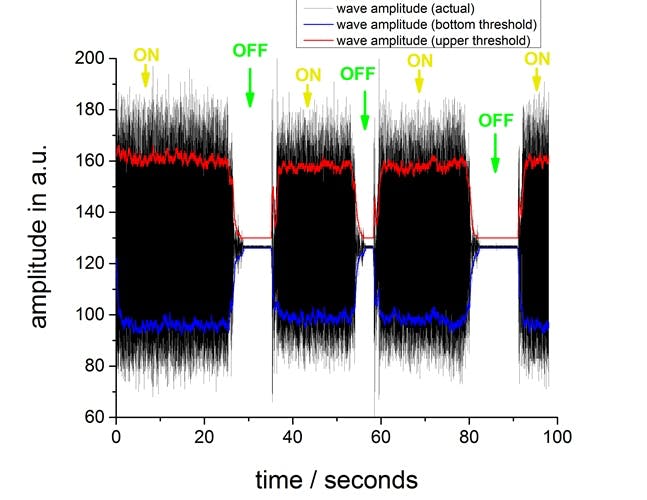
图 25。在 KenjiX1 机器人上测量的运行有刷直流电机振动曲线。
最后,我们有了它……在(图 25.)中,我们将测量数据可视化并从中创建了一个漂亮且信息丰富的图表,可以将其包含在报告或技术文档中。
- 无刷直流电机与有刷直流电机的区别
- STM32 HAL驱动有刷直流电机和无刷直流电机
- 无刷直流电机与有刷直流电机的区别
- 无刷直流电机原理
- 无刷直流电机原理图
- 无刷直流电机最终版 0次下载
- 永磁无刷直流电机
- 永磁无刷直流电机的优缺点
- 永磁无刷直流电机简介
- 无刷直流电机的工作原理
- 无刷直流电机运行原理与基本控制
- 好用的无刷直流电机论文下载 26次下载
- 有刷直流电机基础知识讲解 19次下载
- 永磁直流电机的原理
- 无刷直流电机的原理与驱动
- 无刷直流电机的类型和工作原理 3607次阅读
- BLDC电机与有刷直流电机的区别 968次阅读
- 永磁无刷直流电机的控制方法 1494次阅读
- 有刷直流电机的发电原理是什么 1694次阅读
- 有刷直流电机的PWM驱动原理 8860次阅读
- 有刷直流电机基础知识及驱动电路 1.3w次阅读
- 无刷直流电机的优势及工作原理 6682次阅读
- 有刷直流电机的转矩负载、转速、电机电流的关系 1.6w次阅读
- 微型有刷直流电机与无刷电机对比分析 3341次阅读
- 微雪电子140直流电机140 DC Motor简介 4115次阅读
- 什么是无刷直流电机(BLDC)以及它的应用 5.2w次阅读
- 解析什么是无刷直流电机(BLDC) 2.3w次阅读
- 一文解析无刷直流电机与直流有刷电机的区别 4.4w次阅读
- 有刷直流电机工作原理详解 8.5w次阅读
- 微芯有刷直流电机控制方案 3082次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论