 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
大家好,您是否正在寻找可以在没有互联网的情况下使用 WiFi 控制的机器人?如果是这样,请按照我们将要讨论的使用NodeMCU esp8266制作wifi 控制机器人的程序。您可以通过点击给定的按钮来控制机器人的方向。为了控制车轮,我们使用了L298N 电机驱动模块。您还可以在我们的网站上查看完整的项目并提供详细说明。
它是如何工作的?
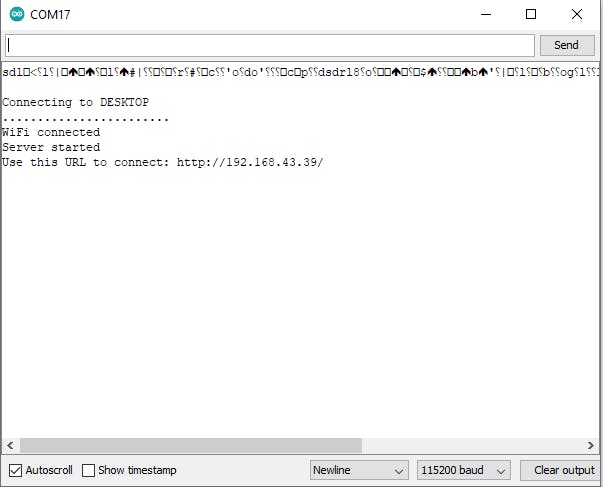
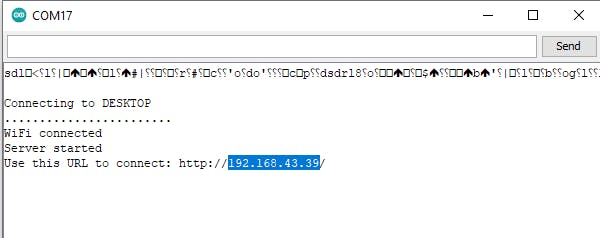
您必须在给定代码中写入您的网络(移动热点)SSID和密码,以便 NodeMCU 可以连接到它。NodeMCU 将生成一个 IP 地址,您可以在串行监视器屏幕上看到该地址。记下此 IP 地址并将其写在您可以在下图中看到的框中。
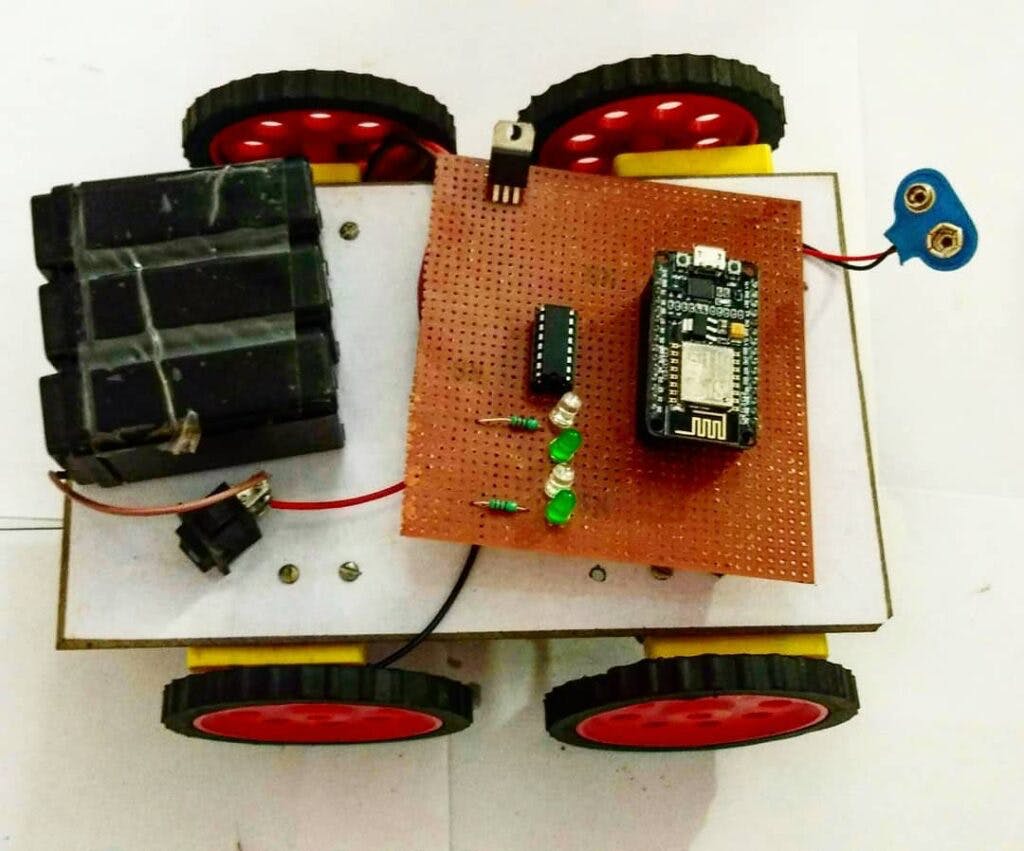
机器人将根据您点击的按钮移动。它可以向前、向后、向左和向右移动。只需打开您的机器人并享受它。

这就是我们的机器人的样子。
所需组件
WiFi控制机器人电路图
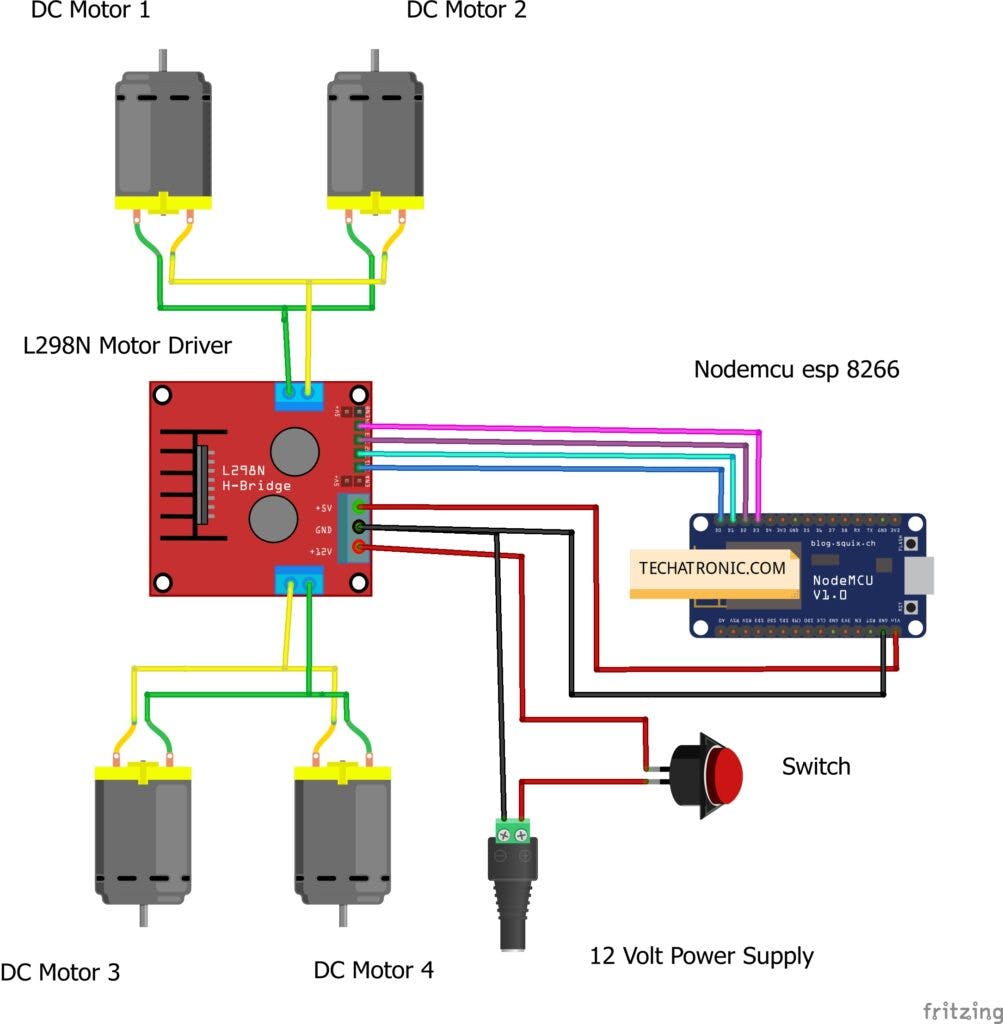
将两台直流电机的正极和负极线组合在一侧,并将电线连接到 L298N 电机驱动器的一侧输出。对第二对直流电机重复相同的操作,并将电线连接到 L298N 电机驱动器的另一个输出。将 L298N 模块的 IN-1 引脚与 NodeMCU 的 D-0 引脚连接起来,将 L298N 模块的 IN-2 引脚与 NodeMCU 的 D-1 引脚连接起来。将 L298N 模块的 IN-3 引脚与 NodeMCU 的 D-2 引脚连接,将 L298N 模块的 IN-4 引脚与 NodeMCU 的 D-3 引脚连接。将 L298N 模块的 5 伏引脚与 NodeMCU 的 VIN 引脚连接起来,将 L298N 模块的 GND 引脚与 NodeMCU 的 GND 引脚连接起来。将 12 伏电源的正极线连接到开关,然后连接到 L298N 模块的 12 伏引脚。
WiFi控制机器人代码
注意:请将下面给出的代码上传到 NodeMCU。
//TECHATRONIC.COM
// ESP8266 LIBRARY
// https://github.com/ekstrand/ESP8266wifi
#include
String i;
WiFiServer server(80);
void setup()
{
i = "";
Serial.begin(9600);
pinMode(16, OUTPUT); // GPIO pin16=D0 of NodeMCU 12E or in place of '16' you can write'D0' directly || -->Connected to motordriver
pinMode(5, OUTPUT); // GPIO pin5= D1 of NodeMCU 12E or in place of '16' you can write 'D0' directly || -->Connected to motordriver
pinMode(4, OUTPUT); // GPIO pin4= D2 of NodeMCU 12E or in place of '16' you can write 'D0' directly || -->Connected to motordriver
pinMode(0, OUTPUT); // GPIO pin0= D3 of NodeMCU 12E or in place of '16' you can write 'D0' directly || -->Connected to motordriver
WiFi.disconnect();
delay(2000);
Serial.println("Connecting to WIFI");
WiFi.begin("DESKTOP","asdfghjkl"); //Enter WIFI Name & Password
while ((!(WiFi.status() == WL_CONNECTED))){
delay(300);
Serial.print("..");
}Serial.println("I am Connected");
Serial.println("My Local IP is : ");
Serial.print((WiFi.localIP()));
server.begin();
}
void loop()
{
WiFiClient client = server.available();
if (!client) { return; }
while(!client.available()){ delay(1); }
i = (client.readStringUntil('\r'));
i.remove(0, 5);
i.remove(i.length()-9,9);
if (i == "forward") {
digitalWrite(16,HIGH);
digitalWrite(5,LOW);
digitalWrite(4,HIGH);
digitalWrite(0,LOW);
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("");
client.println("");
client.println("
); client.println("forward"); client.println(""); client.stop(); delay(1); } if (i == "reverse") { digitalWrite(16,LOW); digitalWrite(5,HIGH); digitalWrite(4,LOW); digitalWrite(0,HIGH); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("reverse"); client.println(""); client.stop(); delay(1); } if (i == "right") { digitalWrite(16,LOW); digitalWrite(5,LOW); digitalWrite(4,HIGH); digitalWrite(0,LOW); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("right"); client.println(""); client.stop(); delay(1); } if (i == "left") { digitalWrite(16,HIGH); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite(0,LOW); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("left"); client.println(""); client.stop(); delay(1); } if (i == "stop") { digitalWrite(16,LOW); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite(0,LOW); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("stop"); client.println(""); client.stop(); delay(1); } }
请查看我们编写的关于 Arduino和Raspberry Pi的热门教程。
学习愉快!
- 手势控制机器人开源项目
- 蓝牙控制机器人开源
- 儿童助理机器人开源项目
- Arduino机器人开源项目
- 消毒机器人开源项目
- 平衡segway机器人开源项目
- 手势控制机器人开源分享
- WIFI控制的分段机器人
- 带有NodeMCU的WiFi控制机器人
- 键盘控制的WiFi机器人/间谍机器人
- 蓝牙控制机器人开源分享
- WiFi控制机器人开源分享
- 机器人开源项目
- 自主机器人开源项目
- 基于DSP和PC的农业机器人控制系统 17次下载
- 如何使用PLC控制机器人 794次阅读
- 机器人技术中常用的路径规划算法的开源库 843次阅读
- 机器人项目涉及的技术 857次阅读
- 利用STM32实现自平衡机器人功能项目 873次阅读
- 基于PIC单片机和PSC控制器实现机器人控制系统的设计 3699次阅读
- 机器人控制系统分类_机器人控制系统有哪些 2.6w次阅读
- 工业机器人技术应用 5176次阅读
- 机器人控制器有哪些类型_机器人控制器发展 1.1w次阅读
- 关于工业机器人智能控制的四种控制方式 6336次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 移动机器人控制系统设计与仿真 3433次阅读
- 机器人控制系统的基本单元与机器人控制系统的特点分析 1w次阅读
- 机器人的运动控制的介绍和如何将机器人的运动控制分成4种任务 1w次阅读
- 基于PLC的机器人伺服运动控制系统设计详解 1.5w次阅读
- 机器人自动化工程项目方案设计包括的6个步骤解析 1.2w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论