 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
在本教程中,我们将使用连接到伺服电机的 HC-SR04 超声波传感器制作带有雷达的 Arduino 避障机器人汽车。
为什么这个项目比其他所有“避障车”项目都好,因为那里的大多数项目只检测前面的障碍物,然后伺服检查左侧或右侧并决定机器人应该去哪里,所以没有对所有角度的实时检测。
在这辆机器人车上,伺服器一直将超声波从左侧旋转到右侧,就像雷达一样,一旦在任何一点上检测到障碍物,就会触发反向,并且行进方向是变了。
“雷达”探测的角度可以调整,探测的距离也可以调整。
第 1 步:您需要什么

1 / 6
- Arduino UNO(或任何其他板)
- 智能车底盘四驱
- L298N 直流电机控制器
- 超声波传感器(HC-SR04)
- 伺服电机
- 超声波传感器 (HC- SR04) 支架伺服安装 - 3D 打印部件在这里下载如果您没有支架,您可以找到其他方法将传感器连接到伺服电机,也许是一些胶水等
- 跳线
- Visuino 程序:下载 Visuino
第 2 步:电路
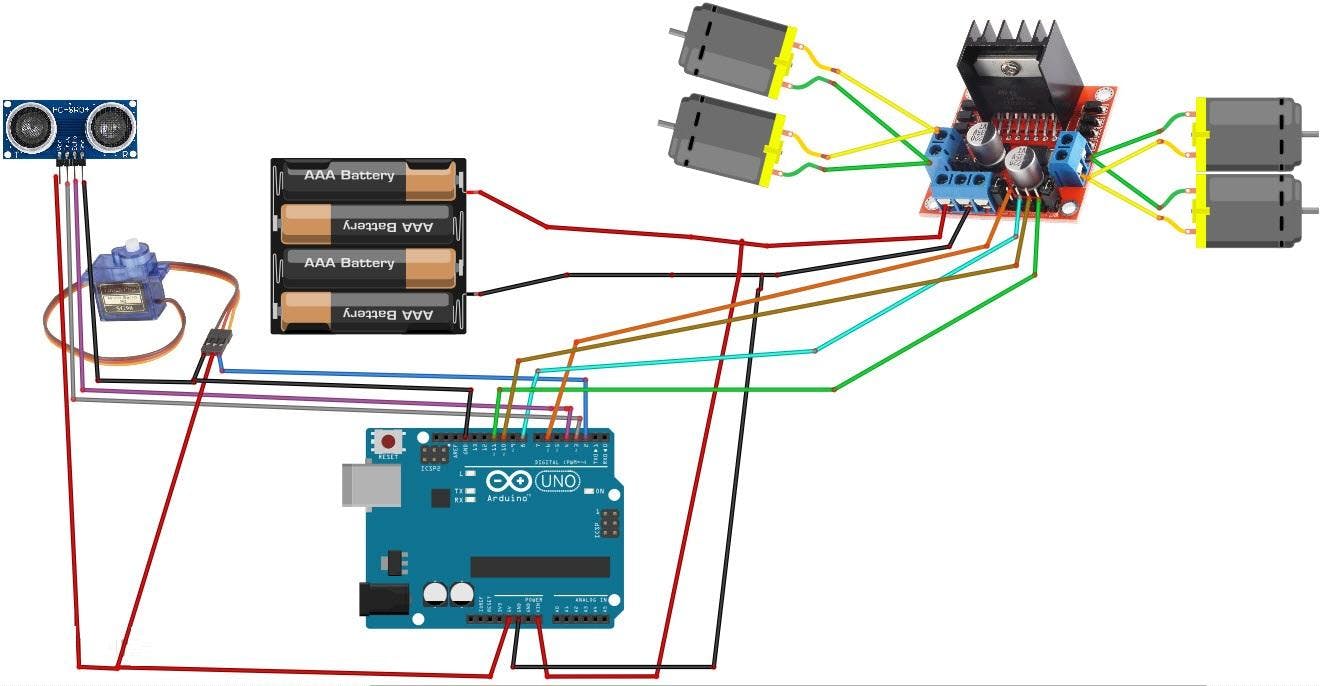
- 将电源(电池)引脚(gnd)连接到电机驱动器控制器引脚(gnd)
- 将电源(电池)引脚 (+) 连接到电机驱动器控制器引脚 (+)
- 将电源(电池)引脚 (+) 连接到 Arduino 引脚 (VIN)
- 将 Arduino 的 GND 连接到电机驱动器控制器引脚 (gnd)
- 将 Arduino 的数字引脚 (6) 连接到电机驱动器引脚 (IN1)
- 将 Arduino 的数字引脚 (8) 连接到电机驱动器引脚 (IN2)
- 将 Arduino 的数字引脚 (10) 连接到电机驱动器引脚 (IN3)
- 将 Arduino 的数字引脚 (11) 连接到电机驱动器引脚 (IN4)
- 将直流电机(在机器人的右侧)连接到电机驱动器的一侧
- 将直流电机(在机器人的左侧)连接到电机驱动器的另一侧
- 将超声波模块引脚 (VCC) 连接到 Arduino 引脚 [+5V]
- 将超声波模块引脚 (GND) 连接到 Arduino 引脚 [GND]
- 将超声波模块引脚 (ECHO) 连接到 Arduino 数字引脚 (4)
- 将超声波模块引脚 (TRIG) 连接到 Arduino 数字引脚 (3)
- 将伺服电机“橙色”(信号)引脚连接到 Arduino 数字引脚 [2]
- 将伺服电机“红色”引脚连接到 Arduino 正引脚 [5V]
- 将伺服电机“棕色”引脚连接到 Arduino 负极引脚 [GND]
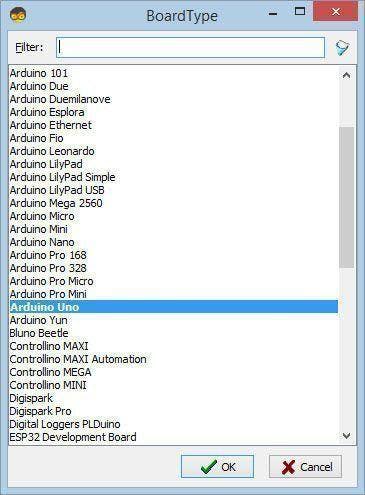
第 3 步:启动 Visuino,并选择 Arduino UNO 板类型
1 / 2
需要安装Visuino:https ://www.visuino.eu。如图1所示启动Visuino 单击Visuino中Arduino组件(图1)上的“工具”按钮 出现对话框时,选择“Arduino UNO”,如图2所示
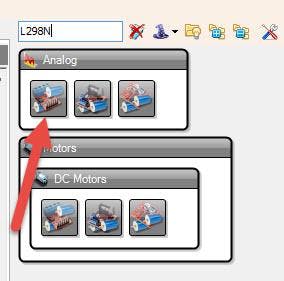
第 4 步:在 Visuino 添加组件
1 / 10
- 添加“时钟发生器”组件
- 添加“正弦模拟发生器”组件
- 添加“超声波游侠”组件
- 添加“伺服”组件
- 添加“比较模拟值”组件
- 添加“模拟值”组件
- 添加“定时器”组件
- 添加“逆变器”组件
- 添加 2X“ Speed and Direction To Speed ”组件
- 添加“ L298N ”组件
第 5 步:在 Visuino 中设置组件
1 / 6
- 选择“ ClockGenerator1 ”并在“属性”窗口中将“频率”设置为 70
这意味着伺服电机移动多快(您可以调整数字)
- 选择“ SineAnalogGenerator1 ”并在属性窗口中将“ Amplitude ”设置为 0.3
这意味着伺服将向左或向右旋转多远。(您可以调整数字)
- 选择“ CompareValue1 ”并在“属性”窗口中选择“比较类型” ctSmallerOrEqual并将“值”设置为 30(您可以调整数字)
这意味着在 30 厘米或更短的距离处,机器人小车将倒车(您可以调整数字)
- 选择“ AnalogValue1 ”并在“属性”窗口中将“值”设置为 0.9
这将是机器人汽车的默认速度您可以将其设置为更小或设置为 1 以获得全速
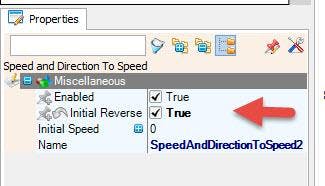
- 选择“ SpeedAndDirectionToSpeed1 ”并在属性窗口中将“ Initial Reverse ”设置为 True
这将反转启动方向,根据您的电机接线,您可以将其保留为 False
- 选择“ SpeedAndDirectionToSpeed2 ”并在属性窗口中将“ Initial Reverse ”设置为 True“这将反转启动方向,根据您的电机接线,您可以将其保留为 False
第 6 步:在 Visuino Connect 组件中
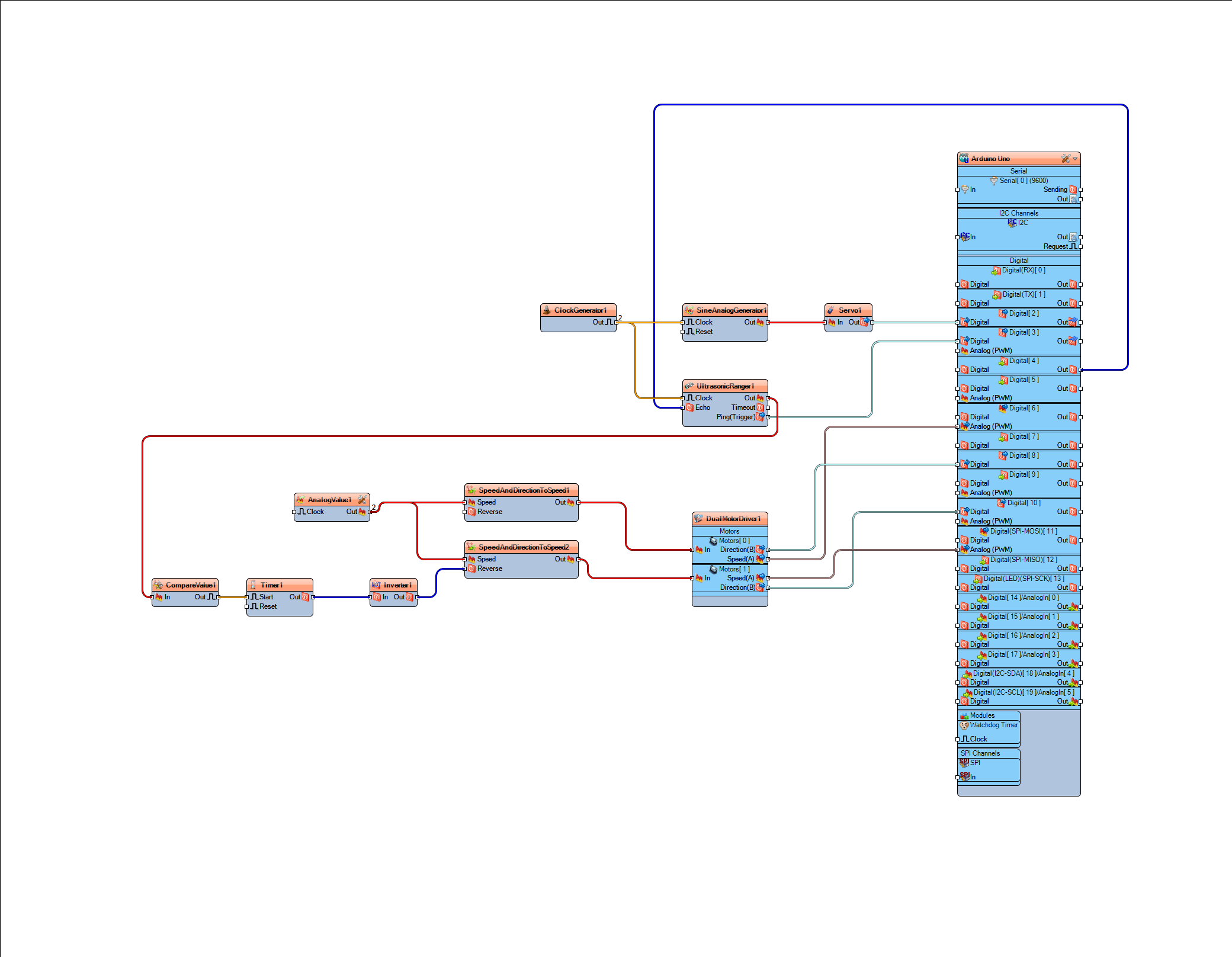
1 / 3
- 将“ ClockGenerator1 ”引脚 [Out] 连接到“ ClockGenerator1 ”引脚 [Clock]
- 将“ ClockGenerator1 ”引脚 [Out] 连接到“ SineAnalogGenerator1 ”引脚 [Clock]
- 将“ SineAnalogGenerator1 ”引脚 [Out] 连接到“ Servo1 ”引脚 [In]
- 将“ Servo1 ”引脚[Out]连接到Arduino板数字引脚[2]
- 将Arduino 板数字输出引脚 [4] 连接到“ UltrasonicRanger1 ”引脚 [Echo]
- 将“ UltrasonicRanger1 ”引脚 [Trigger] 连接到 Arduino 板数字引脚 [3]
- 将“ UltrasonicRanger1 ”引脚 [Out] 连接到“CompareValue1”引脚 [In]
- 将“ CompareValue1 ”引脚 [Out] 连接到“Timer1”引脚 [Start]
- 将“ Timer1 ”引脚 [Out] 连接到“ Inverter1 ”引脚 [In]
- 将“ Inverter1 ”引脚 [Out] 连接到“ SpeedAndDirectionToSpeed2 ”引脚 [Reverse]
- 将“ IAnalogValue1 ”引脚 [Out] 连接到“ SpeedAndDirectionToSpeed1 ”引脚 [Speed]
- 将“ IAnalogValue1 ”引脚 [Out] 连接到“ SpeedAndDirectionToSpeed2 ”引脚 [Speed]
- 将“ SpeedAndDirectionToSpeed1 ”引脚 [Out] 连接到“ DualMotorDriver1 ”“Motor0”引脚 [In]
- 将“ SpeedAndDirectionToSpeed2 ”引脚 [Out] 连接到“ DualMotorDriver1 ”“Motor1”引脚 [In]
- 将“ DualMotorDriver1 ”“Motor0”引脚 [方向 B] 连接到Arduino 板数字引脚 [6]
- 将“ DualMotorDriver1 ”“Motor0”引脚 [Speed A] 连接到Arduino 板模拟 (PWM) 引脚 [8]
- 将“ DualMotorDriver1 ”“Motor1”引脚 [Speed A] 连接到Arduino 板模拟 (PWM) 引脚 [11]
- 将“ DualMotorDriver1 ”“Motor1”引脚 [方向 B] 连接到Arduino 板数字引脚 [10]
第 7 步:生成、编译和上传 Arduino 代码
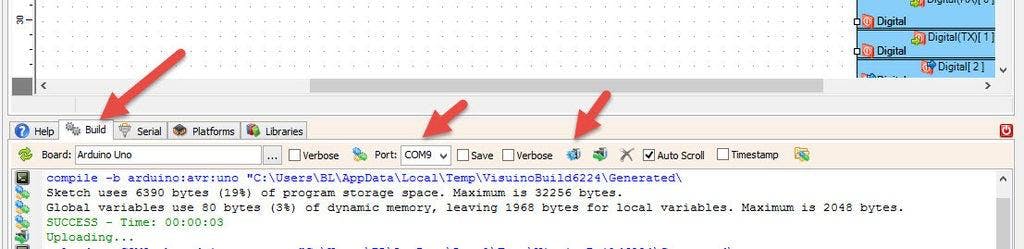
。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 自动驾驶中激光雷达如何检测障碍物
- 基于Arduino的避障车 2次下载
- 创建一个能够警告接近障碍物的系统
- 障碍物检测和颜色跟随机器人的创建
- Robobug六足动物行走和跟随障碍物开源硬件
- 使用IR模块的障碍物检测器
- Arduino障碍物避免机器人汽车
- ESP8266 SOC智能硬件典型应用方案之红外障碍物检测 0次下载
- 使用贝叶斯决策和Hough实现非结构化道路检测与障碍物识别算法 8次下载
- 设计一个循迹避障一体的智能小车的资料和代码及电路图详细概述 28次下载
- 海底复杂环境下机器人摆脱障碍物路径优化方法研究 0次下载
- 移动机器人的障碍物群检测方法 17次下载
- 基于机器视觉的道路识别与障碍物检测技术研究
- 基于双目视觉的移动机器人障碍物检测研究
- 汇编语言程序设计案例—动态显示/障碍物检测/障碍物方位检测
- 雷达探测障碍物是超声波还是次声波 1655次阅读
- 用Arduino做一个自动割草机 2020次阅读
- 激光雷达能稳定感知算法未见过的异形障碍物 1047次阅读
- 基于点云的3D障碍物检测介绍 1007次阅读
- 深度聊聊4D毫米波雷达技术及发展 2802次阅读
- 如何使用Arduino测量障碍物的距离 7833次阅读
- 基于用于检测障碍物的传感器的3D打印清洁机器人 2199次阅读
- NI车载雷达测试系统 专为自动化设计验证、测试和测量而设计 2965次阅读
- 移动机器人智能的一个重要标志是智能导航 3761次阅读
- 关于MinBox障碍物边框构建的干货! 5457次阅读
- 基于双目视觉的自动驾驶中障碍物识别问题 1.2w次阅读
- 自动驾驶技术的传感器超声波雷达的详细介绍和应用的资料概述 1.8w次阅读
- 两大24GHz汽车毫米波雷达芯片方案 9310次阅读
- 基于激光传感器的无人驾驶汽车动态障碍物检测跟踪 1678次阅读
- 倒车雷达障碍检测系统的案例分析 3620次阅读

 上传资料赚积分
上传资料赚积分 广告![]()
下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论