 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
Nox 是一款使用 ROS、Raspberry Pi 和 Arduino 构建的差动驱动机器人。我开始这个项目是作为一个具有基本导航功能的机器人基地,然后我可以将其用于其他用途,例如真空吸尘器。然而,我很快决定将它做成一个具有适当设计的独立机器人,因为它在 DIY 机器人中经常缺失。在当前状态下,机器人可以使用 SLAM(gmapping)创建其周围环境的地图(使用 Kinect 深度感知来检测墙壁和障碍物)并在地图内定位自己。它可以规划通往给定目标的路径并避开障碍物。
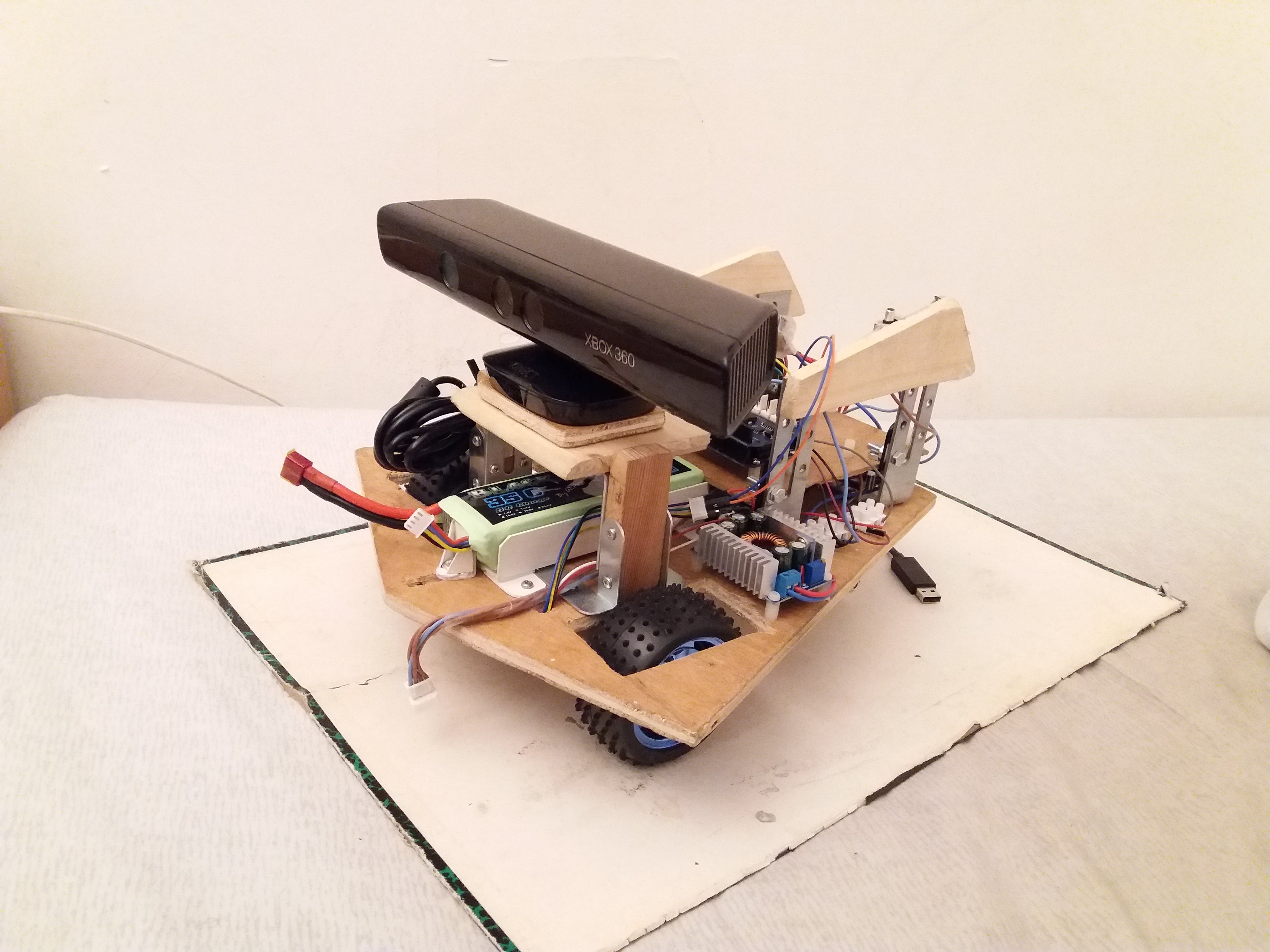
Nox 由 11.1v 锂离子电池供电,由两个电机驱动。可以卸下前面板以更换电池。一个长孔和一个螺丝固定它并允许放置不同长度的电池。我在屏幕上放了一个电池警报器来监控电量。
电机是 Banggood 的两个 12v 直流电机 (107rpm ) 。它们很好,但实际上我不需要机器人走得那么快,我可以用一些速度换取更精确的编码器。
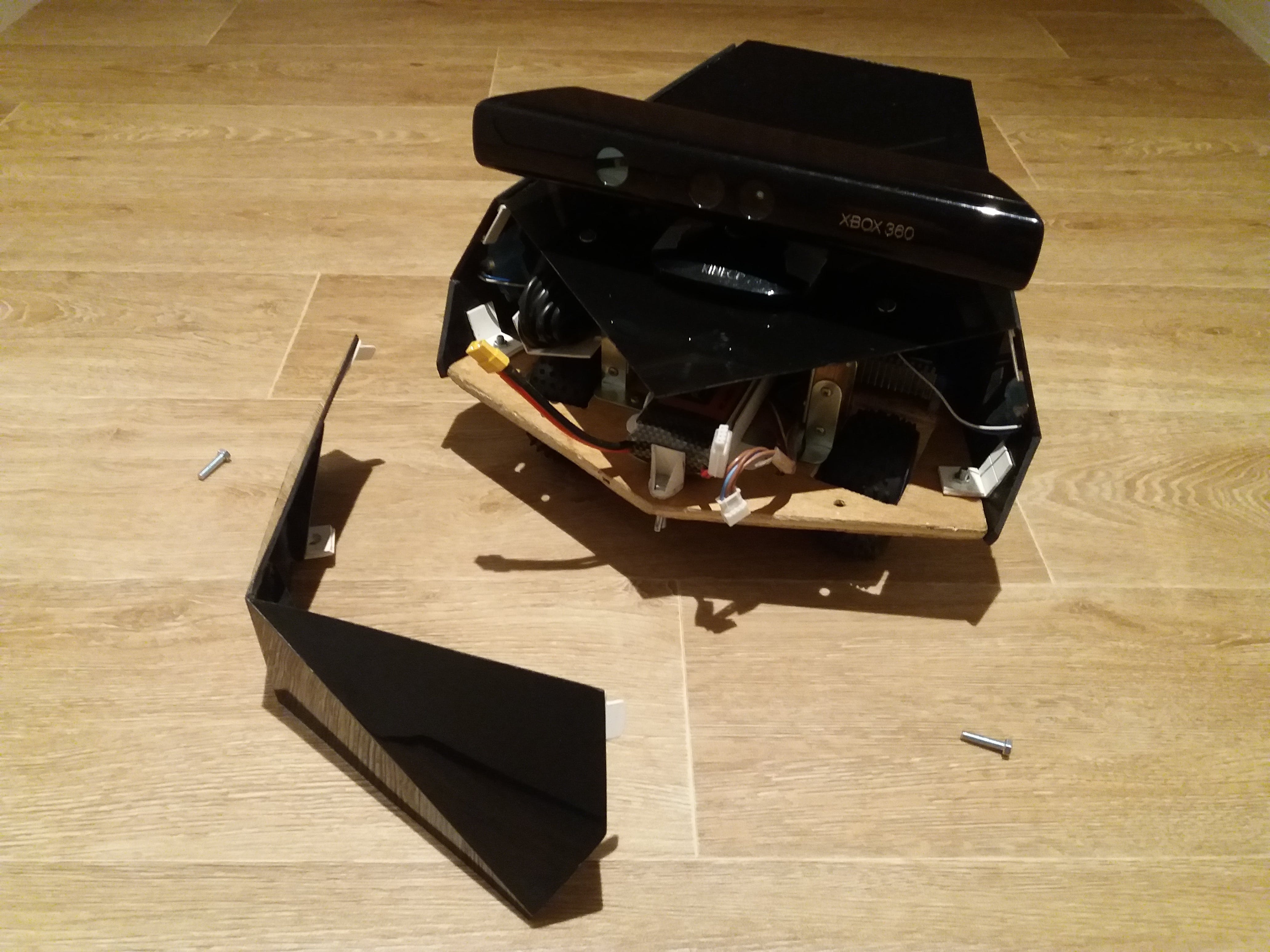
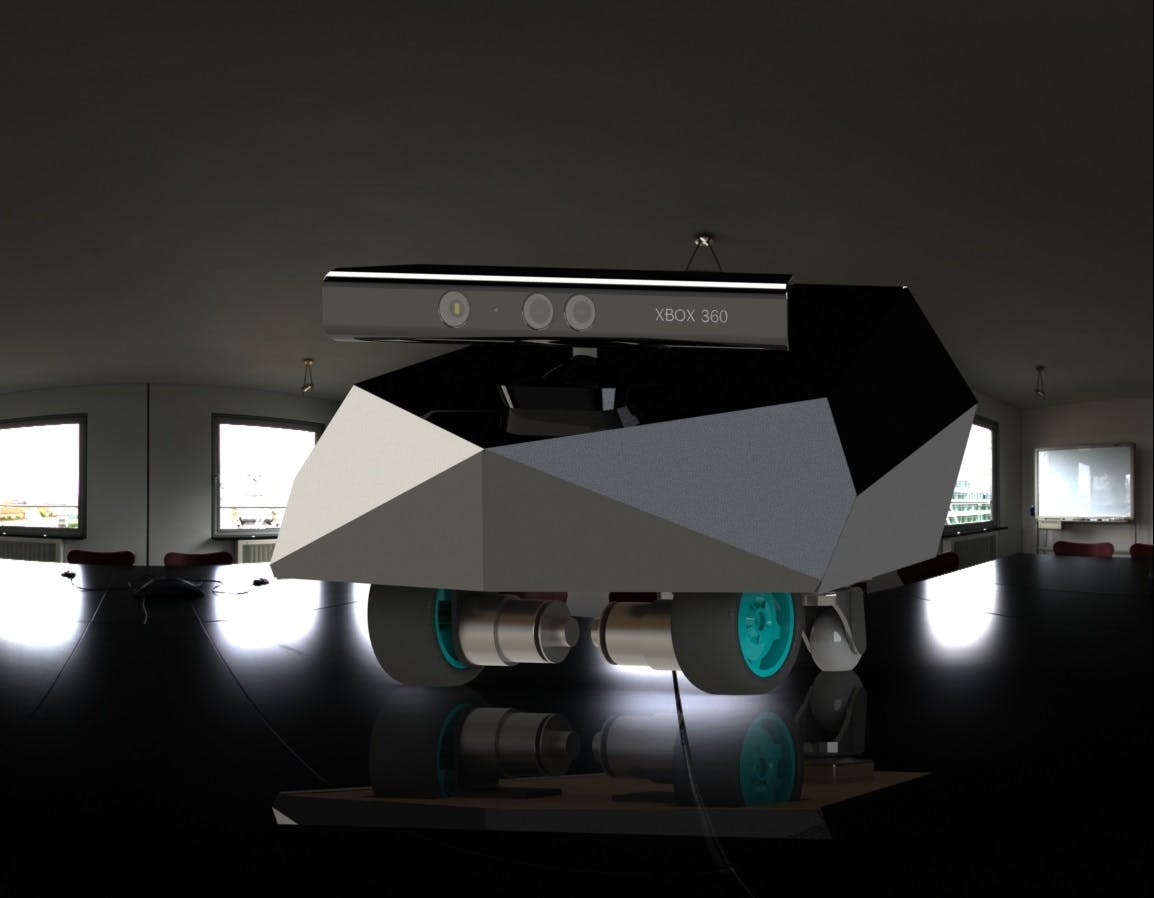
关于设计,主要的限制是要有与 Kinect 良好集成的东西,因为我正在围绕它构建机器人。我的灵感来自于许多现代风格物品的三角形外观(我不得不承认很多来自 Deus Ex)。我真的很想拥有一个漂亮且专业的机器人,因为它是 DIY 机器人中经常缺少的东西(但不要担心布线会像它应该的那样混乱)。花几周时间在 CAD 模型上调整所有内容是必要的。
侧面的灯是从我免费得到的除夕夜发光棒回收的,用于指示机器人状态。当 Arduino 没有连接到 ROS master 时(表示机器人程序还没有启动),灯会很快连续闪烁 3 次。行驶时,灯会像“呼吸”一样闪烁,闪烁速度取决于机器人的速度。
结构
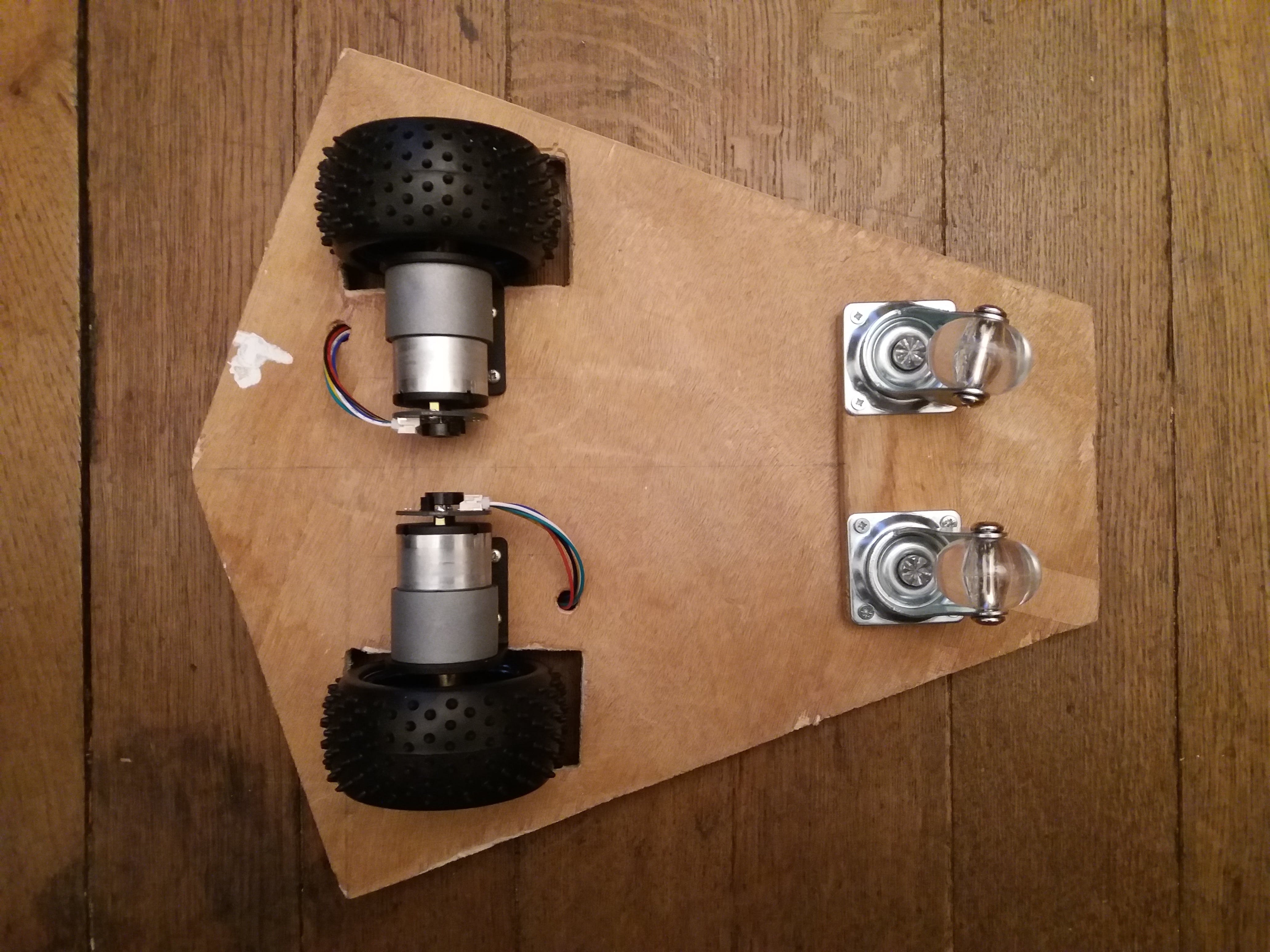
如上所述,该机器人是差动驱动的,因此电机放置在同一轴上。底座由木头制成,带有两个用于支撑的脚轮。我最初计划使用一个脚轮来避免超静电现象,但找不到尺寸合适的脚轮。结构的其余部分主要由木头和金属支架制成,在任何 DIY 零售店都很容易找到。在机器人板的后部可以堆叠以放置电子板。
carter是黑色塑料板做的,手工切割粘上(下次肯定用3D打印)。

。
- " Raspberry Pi 和 PC (ROS) 之间的通信" by mktk1117
- Evangelos Papadopoulos 和 Michael Misailidis 的“ On Differential Drive Robot Odometry with Application to Path Planning ”
- Turtlebot程序
- 来自和歌山大学的 Shuro Nakajima 教授,在那里我有机会通过参与 PMV(个人机动车辆)项目学习(检查它很棒)
- ROS社区里和我遇到同样问题的人和回答他们的人
- 移动机器人的构建
- 使用Arduino Pro Mini构建四轮驱动机器人
- 一种全新的轮式移动机器人轨迹跟踪控制算法 14次下载
- 讲解 | 机器人关节驱动机构和电机动力系统
- 如何使用Matlab和VR技术实现移动机器人的建模和仿真 13次下载
- 移动机器人的导航定位和地图构建技术综述 22次下载
- 如何才能实现移动机器人的导航定位和地图构建技术 22次下载
- 使用Matlab和VR技术实现移动机器人的建模及仿真的方案说明 10次下载
- 设计全向滚动球形机器人的内驱动机构和运动分析与轨迹规划 6次下载
- 如何使用Web移动机器人控制系统研究及Java实现资料说明 5次下载
- 差动式自适应管道机器人的设计 2次下载
- 移动机器人的分类与移动机器人技术研究现状和未来发展的分析 13次下载
- 基于驱动机器人的校准传感器的设计指南 2次下载
- 欠驱动机器人可控性综述 17次下载
- 轮式移动机器人WMR的运动分析 33次下载
- 智能移动机器人系统方案指南 481次阅读
- 如何使用DonkeyCar平台构建一个自主机器人 2296次阅读
- 基于使用A4988驱动程序和HC-05 bt模块构建自平衡机器人 2152次阅读
- 移动机器人是如何定位的 4526次阅读
- 移动机器人控制系统设计与仿真 3641次阅读
- 仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop 6250次阅读
- 移动机器人的机构与分类分析 8268次阅读
- 工业机器人对关节驱动电机的要求 1.1w次阅读
- 伺服电动机在工业机器人中应用的先决条件是什么 4268次阅读
- 如何区分机器人、协作机器人和移动机器人? 7029次阅读
- 如何选择机器人电机_机器人电机选择举例 1w次阅读
- 关于被动同心转向式多履带全向移动机器人的设计 9148次阅读
- 自主移动机器人的定位与地图创建(SLAM)关键性问题 1986次阅读
- 如何使用HRMRP机器人平台构建机器人应用系统 1699次阅读
- 小生境遗传算法的移动机器人路径优化技术 1254次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论