 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
接下来我要构建什么?请注意,这是我购买和制造的最昂贵的机器人,即使直接从 Yahboom 订购可享受 10% 的折扣,价格也超过 1000.00 美元。
“
让我回顾一下历史……大约 6 周。我很兴奋,但那是短暂的。此信息适用于现在不可用的旧版本软件……Ubuntu 16.04、ROS 1.0、Ubuntu 18.04,甚至我的 Windows 11 和 10 笔记本电脑在测试甚至“发现”此设备时都犹豫不决。我的 Raspberry Pi 3B+、我的 4B、我的 Jetson Nano,甚至 Arduino Uno 和 Mega 都无法发现或加载在 RPLidar 和 SBC 之间互连的 CH341 USB 到串行驱动程序/CP210x 通用 USB 驱动程序。
CH341 / CP210x USB 设备从未被识别,但 RPLidar 通电并以其标称速度旋转,但此 USB 互连板上的活动 LED 从未亮起。我最初以为我的 USB 板有缺陷,亚马逊给我寄来了一个完整的替换组件。尽管软件安装成功,但我的任何设备都未检测到这两个单元。在给相关供应商和技术支持发送了两周的电子邮件后,我退回了这两个装置,并将 LIDAR 失败归咎于教育和经验。
我也很想通过“YouYeeToo 以 678.00 美元的价格购买类似的机器人”

Amazon.com:youyeetoo Ackerman 开源 AI 机器人车载套件,用于学习机器人操作系统以实现视觉或激光雷达映射、人脸识别和智能跟随(Raspberry Pi Master 不包括电池):Industrial & Scientific ”,但在直接与他们的技术商谈后支持和营销团队对我当时对产品的稳健性和文档缺乏完整性的担忧——我们都决定我不应该购买他们的工具包。我从来没有一个供应商对我说“不要买我们的产品”。
回到 2021 年 12 月 10 日,我发现 Yahboom 正在销售具有以下所有功能的 Jetson Nano 版机器人;(但在与他们的技术支持交换电子邮件后,我决定暂缓使用仍在开发中的 Raspberry Pi 版本。)
一个完整的机器人,带有 RPLidar、高清和深度摄像头、机械臂、7 英寸 HDMI 屏幕、坦克底盘,由 Jetson Nano 或带有 4gb/8gb ram 的 Raspberry Pi 4B 控制,软件基于 Ubuntu 18.04以及 ROS 和 OPENCV;但起价为 749.00 美元至 1349.00 美元(提供 5 种不同版本)。由 Yahboom 制作。哎呀!!!!
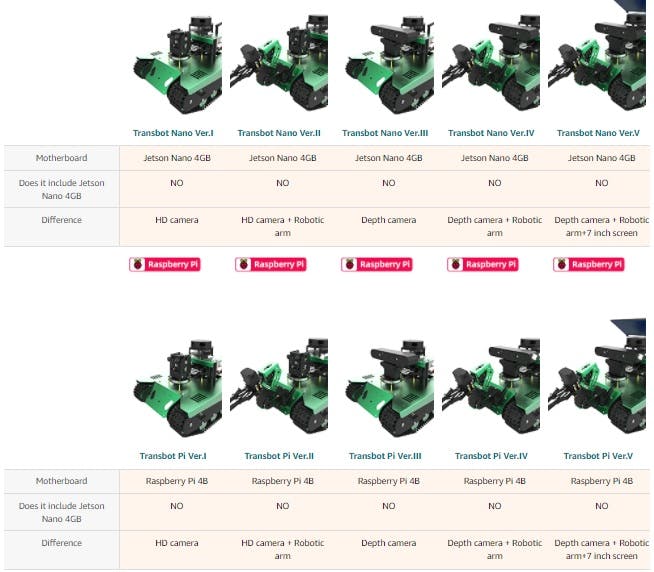
“ Yahboom ROS Transbot Robot with Lidar Depth camera support MoveIt 3D m ” 我选择提供我自己的 Raspberry Pi 4B(4gb 或 8gb 内存),可大幅节省 300.00 美元。我上周购买了它,当时 Raspberry Pi 版本于 2022 年 1 月 4 日正式发售,比网站价格节省 10%,它通过 DHL 发货,比预期提前一天于 2022 年 1 月 13 日送达。
以下是 Yahboom 从亚马逊网站复制的产品信息:
**********************************************
- ★★★注意:Yahboom推荐Raspberry Pi 4B 8GB,虽然Raspberry Pi 4B 4GB也可以用,但是会卡顿。只要你热爱ROS,它就是不容错过的机器人,是创客、程序员梦寐以求的专业礼物。Yahboom 提供专业的技术帮助,请在页面上留下您的问题或联系我们。
- ****************************************************** ***

我被卖掉了这些功能......请情绪化,不要让我哭......所以现在我的身材,

。
我的组装步骤:
1.开箱
2. 布局和识别内容

3.安装高清摄像头或深度摄像头(可选-我都购买了)


我将安装 Orbbec Astra 深度相机。
A. 首先从袋子 4 中收集带有“Y-Yoke”的深度相机旋转支架、一个 M6 六角螺丝、四个 M2 螺丝、两个 M3 螺丝和开口垫圈、相机安装支架、袋子 2- 一把扳手。
。
“
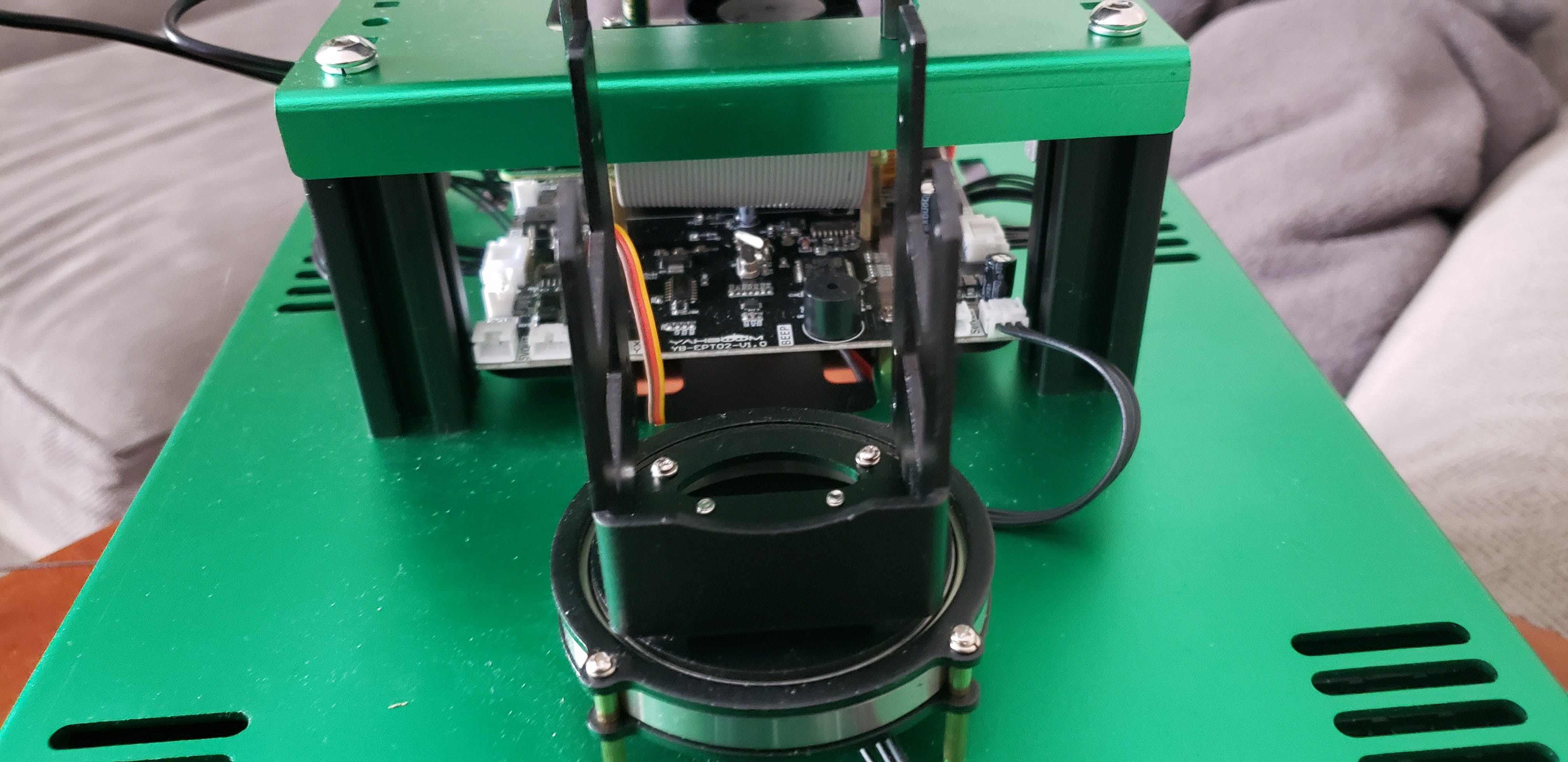
4.安装机器人接口IO板

A. 收集以下硬件:机器人接口 IO 板,Bag 1- 四个 M2.5*11+6 mm 铜柱/支架,Bag2- 四个 M2.5*19+6 mm 铜柱/支架,两个 M2.5锁紧螺母和 PI 包 - 一个扳手,带有四个 M2.5*14+6 铜柱/支架
B. 将两个 M2.5*19+6 铜柱/支架连接到机器人接口 IO 板上两个安装孔的中心,并用两个 M2.5 锁紧螺母固定并用 PI 扳手拧紧。注意,使用较长的支架来提供 Raspberry Pi 和 Robot Interface 之间的间距。
C. 将四个 M2.5*19+6 铜柱/螺柱安装到 Transbot 底盘大开口周围的四个螺纹孔中。

D. 使用后面的两个 M2.5*19+6 铜柱和两个 M2,将机器人接口 IO 板安装到四个 M2.5*19+6 铜柱/支架(带有按钮的 IO 板后面)。相机前面的 5*5 毫米螺丝。

。
“
“
5. 安装Raspberry Pi 4B 和32gb Yahboom Transbot 图像和冷却风扇模块和LCD 显示器;我使用了 64gb SD 卡,因此可以在本地存储和操作未来的内容和图片。

A. 准备好以下硬件:最好使用 Raspberry Pi 4B 和 8gb 内存 我从供应商那里得知,但至少可以使用 4gb 版本。接下来是 40 针 GPIO 电缆、小型 LCD 显示屏,以及来自 Bag1 的四个 M2.5 螺钉,来自 PI Bag 的四个 M2.5*14+6 铜柱。
B. 将 40 针 GPIO 带状电缆安装到机器人接口 IO 板连接器上,红线方向使电缆自身折叠并朝向相机布线。注意连接器和路由中的 40 针 GPIO 方向
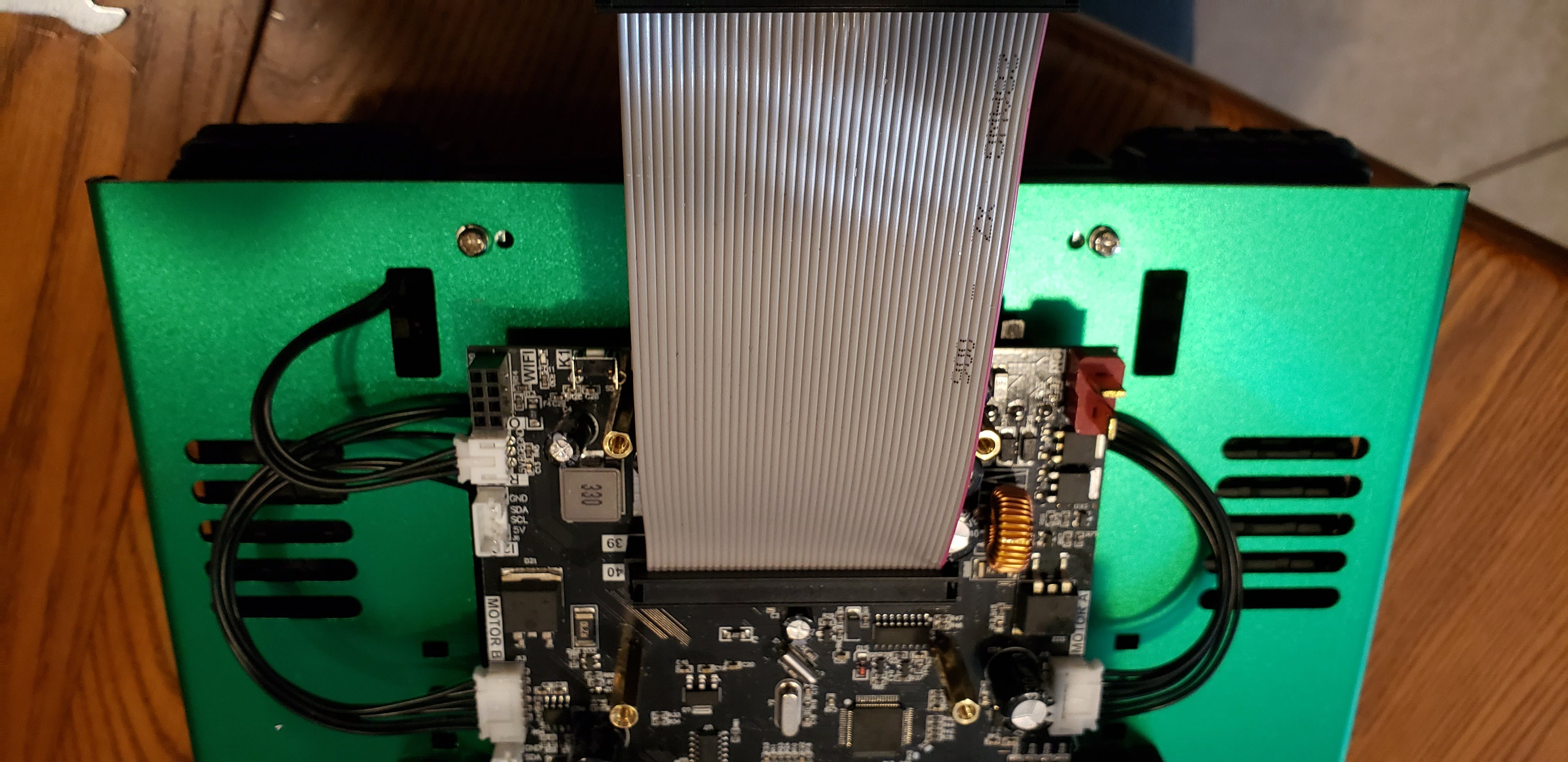
C. 使用四个 M2.5*14+6 铜柱支架将 Raspberry Pi 4B 连接到安装在机器人接口 IO 板上的四个 M2.5*19+6 铜柱支架
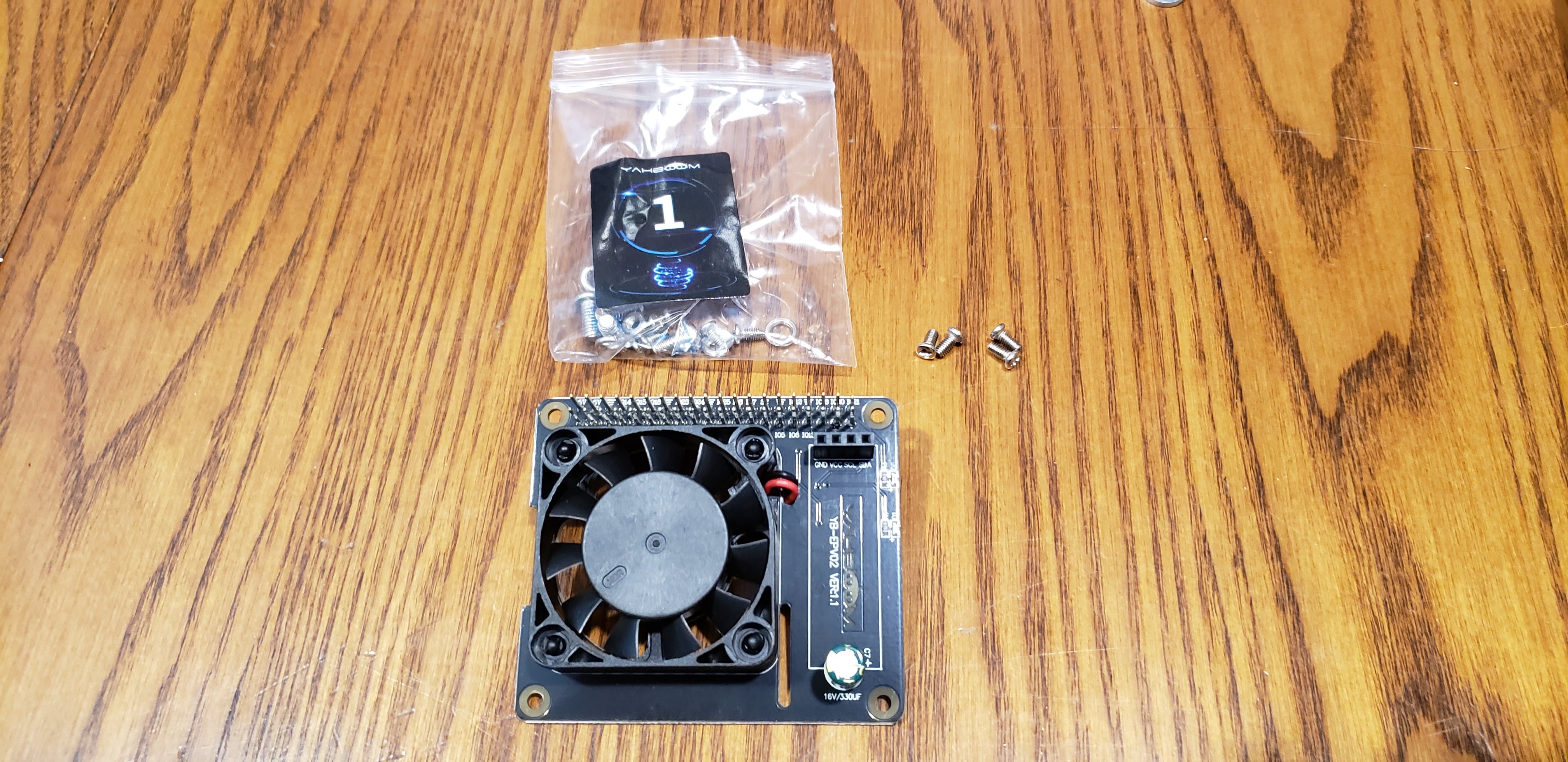
D. 将冷却风扇模块连接到 Raspberry Pi 的 40 针 GPIO 连接器上,并使用 Bag 1-四个 M2.5*5 毫米螺钉固定到位
E. 将 40 针 GPIO 带状电缆连接到冷却风扇上的 40 针接头(正确方向)
F. 将 LCD 显示屏安装到机器人接口 IO 板上的端口上

6.安装激光雷达总成

A. 收集以下物品:RPLIDAR A1M8 模块、盒子、RPLIDAR 组件、USB 接口模块、其 USB IO 电缆、“非常脆弱”的 RPLIDAR 互连电缆,来自 BAG 2- 两个 M6*10 六角螺钉和垫圈以及来自 BAG 6 - 四个 M2.5 螺钉和垫圈、四个 M2.4+4 铜柱/支架和 LIDAR 安装板。还需要 M6 六角扳手和飞利浦/十字螺丝刀,并且随附。

B. 将易碎的 RPLIDAR 互连电缆连接到底部的端口
C. 将 RPLIDAR 连接到 LIDAR 安装板


D. 将四个 M2.4+4 铜柱/支架连接到激光雷达安装板的底部
E. 将 RPLIDAR USB 互连板连接到 LIDAR 安装板

F. 使用 BAG2 的两个 M6*10 六角螺钉和开口/锁紧垫圈连接到方形支架

“
“
7、安装液晶屏模组和电池
A. 收集 4 线 LCD 屏幕模块并连接到机器人互连板上的端口
B. 从 BAG 1 收集电池组盖、电池组 - 四颗 M4.8 螺丝和开口/防松垫圈以及一把十字螺丝刀
C. 将 Transbot 倒置,露出底面
D. 将电池组插入电池组盖中,并将电缆穿过插槽以防万一。这些应该面向安装的电机
E. 将四个 M4.8 螺钉穿过电池盖安装到电池盖每个角的孔中的 Transbot 外壳中
F. 确保机器人接口板的电源开关处于关闭位置
G. 小心地将电池的“T 型插头”连接到接口板上的插孔
“
“
8.安装机械臂(可选)

A. 收集组装好的机器人手臂/机械手组件、BAG 7 - 三个 M3.6 螺钉和开口垫圈、手臂支架
B. 用三颗 M3.6 螺丝将 ARM Mount 安装到 Transbot 机箱前面
C. 从操纵器组件上松开并卸下 ARM 组件锁定螺钉。它是带环的大螺丝。
D. 将 ARM 组件放在安装支架上(松开快速释放旋钮)
E. 将步骤 C 中的环状大螺钉拧入 Transbot 底盘底部的螺纹孔中,进入机械手的螺纹孔中。拧紧以固定到位
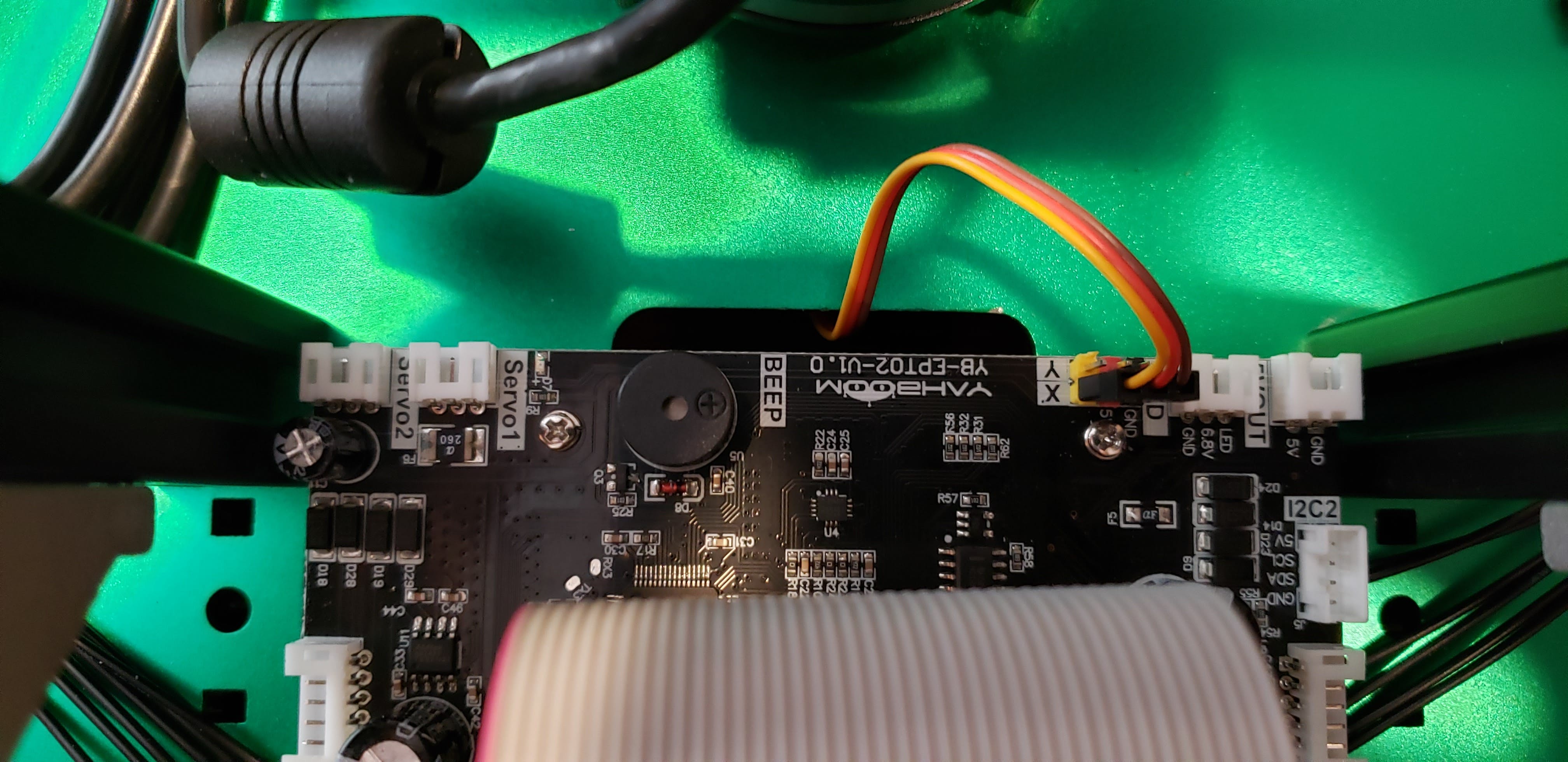
F. 将 3 线伺服黑色电缆布线并连接到机器人接口端口上的伺服端口(右侧白色端口外)
G. 将 3 线(橙色/红色/黑色)伺服线连接到端口伺服 X 端口。
“
“
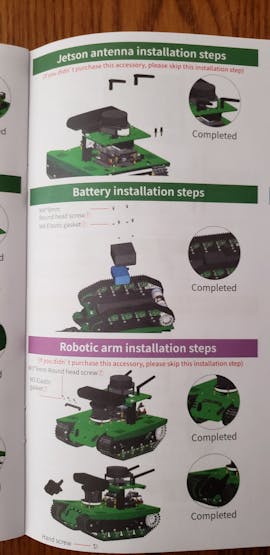
9.安装7寸屏(可选)

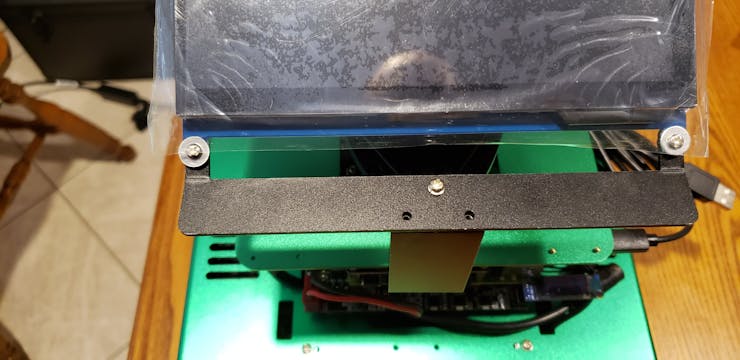

“
“
连接接线

10. 创建/安装 Transbot SD 映像
A. 首先到“http://www.yahboom.net/study/Transbot-Pi”网站下载相应的“工具”和树莓派SD镜像。这些可以在 YAHBOOM 下的 GOOGLE 商店中找到。Arm 有一个快速断开的集线器组件,如果不需要进行测试,可以将其卸下。我发现在使用手机 APP 时,相机的位置不允许 FPV 足够的可见性来挑选物体。
我建议首先将外部 HDMI 屏幕和键盘连接到 Raspberry Pi,然后观察启动顺序和软件加载。这样您就可以看到“大程序”的加载和运行。“大程序”是在 Ubuntu 18.04 桌面的“终端窗口”中启动时加载的主应用程序的中文术语。该程序启动所有需要的软件并寻找用户已连接的各种模块。
用户首先需要确定的是 TRANSBOT 机器人的 WIFI IP 地址。TRANSBOT 机器人将启动自己的本地 AP“接入点”,在我的例子中通常是192.168.1.11 。一旦“大程序”运行,WIFI IP地址将显示在连接到机器人接口的LCD显示器上。最终用户需要此 IP 地址才能在任一远程手机应用程序中使用。
要使用手机访问,您需要通过手机的 wifi 设置“YAHBOOM 是 SID,密码是 12345678”连接到此 AP。一旦“大程序”运行并且您知道 TRANSBOT 的 WIFI IP 地址,手机应用程序将扫描并自动搜索、查找和配置自己以供使用。
在线文档中描述了一种手动方法,需要在按下机器人接口板上的按钮后将机器人置于 WIFI 配置模式后,生成二维码符号并将其放在 TRANSBOT 机器人前面. 再一次,这已写在在线文档中,但我不需要重新配置我的访问权限。
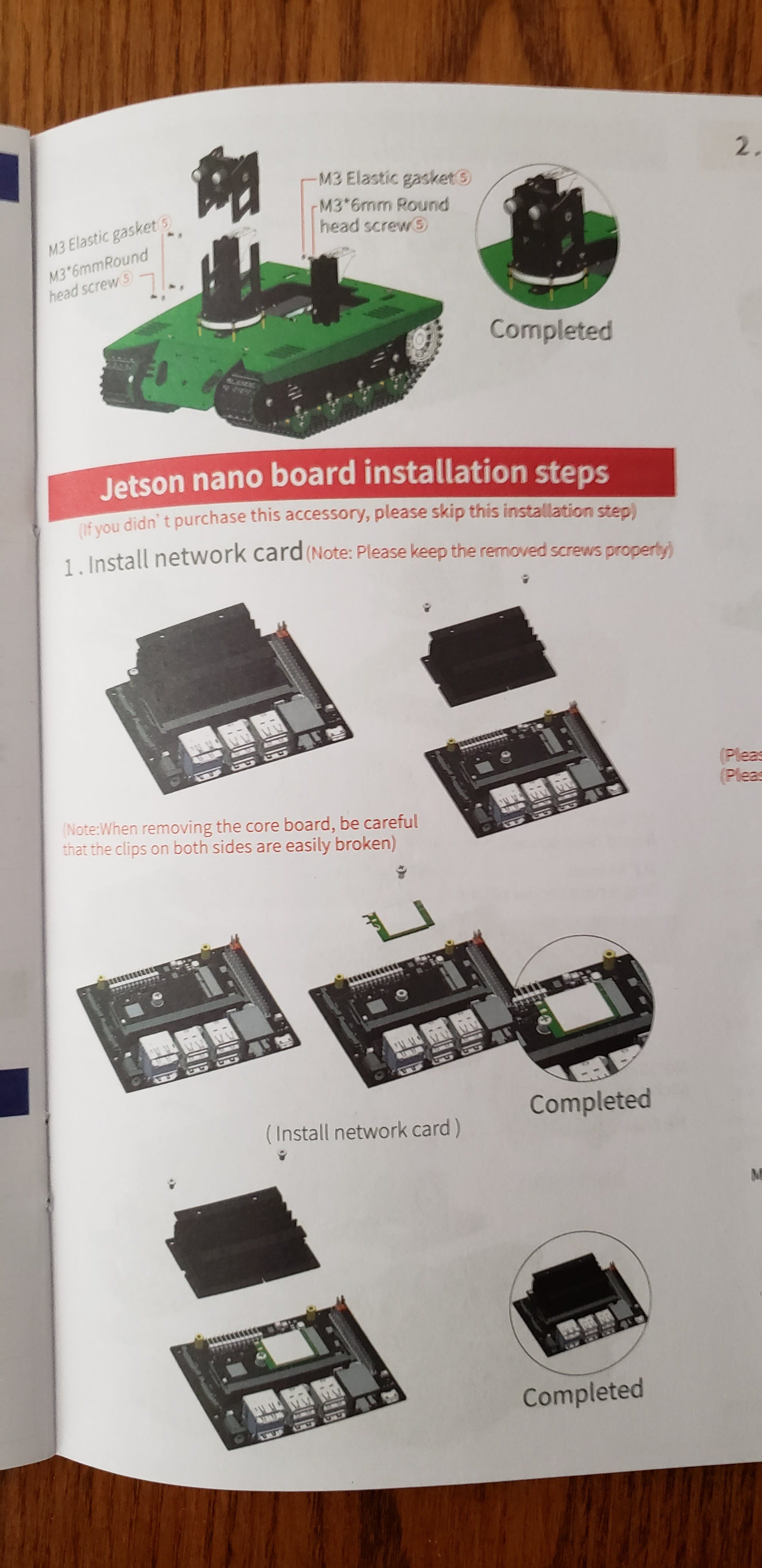
以下是随附手册的屏幕截图,可作为 YAHBOOM ROBOT 应用程序的组装选项和基本功能的参考。

- 语音机器人的构建
- 移动机器人的构建
- Nox:差动驱动机器人的构建
- 自平衡机器人的构建
- 机器人项目构建
- 带有HC-SR04的超声波传感器阵列 0次下载
- 构建机器人系统
- 轻松DIY伴侣机器人构建
- 可以喷洒微滴酒精的小型机器人构建
- 基于STM32的ROS智能移动机器人构建地图、定位以及自主导航研究
- 基于DSP和PC的农业机器人控制系统 17次下载
- 移动机器人的导航定位和地图构建技术综述 22次下载
- 如何才能实现移动机器人的导航定位和地图构建技术 22次下载
- 基于滚动窗口的路径规划算法 18次下载
- 基于遥操作和局部自主的移动机器人越障
- 基于ATmega16构建的线跟随机器人的完整电路图 1789次阅读
- 如何使用DonkeyCar平台构建一个自主机器人 2114次阅读
- 基于使用A4988驱动程序和HC-05 bt模块构建自平衡机器人 2007次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- 工业机器人编程入门_工业机器人的编程要求 9571次阅读
- 医用机器人的定义_医用机器人发展 3122次阅读
- 医用机器人的功能_医用机器人分类 2227次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop 6069次阅读
- 机器视觉的机器人取代四台传统的火焰处理机器人 3270次阅读
- 如何区分机器人、协作机器人和移动机器人? 6828次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.4w次阅读
- 如何使用HRMRP机器人平台构建机器人应用系统 1629次阅读
- 如何构建不伤害人类的工业机器人 1129次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论