 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
- TI-RSLK MAX 基本套件:标准套件中的漫游者和保险杠传感器。( www.ti.com/rslk )
- 红外传感器: Pololu 的 OPT3101 ( https://www.pololu.com/product/3680 )
- GripperServoCity 标准夹具套件 A ( https://www.servocity.com/standard-gripper-kit-a )
RSLK MAX 套件
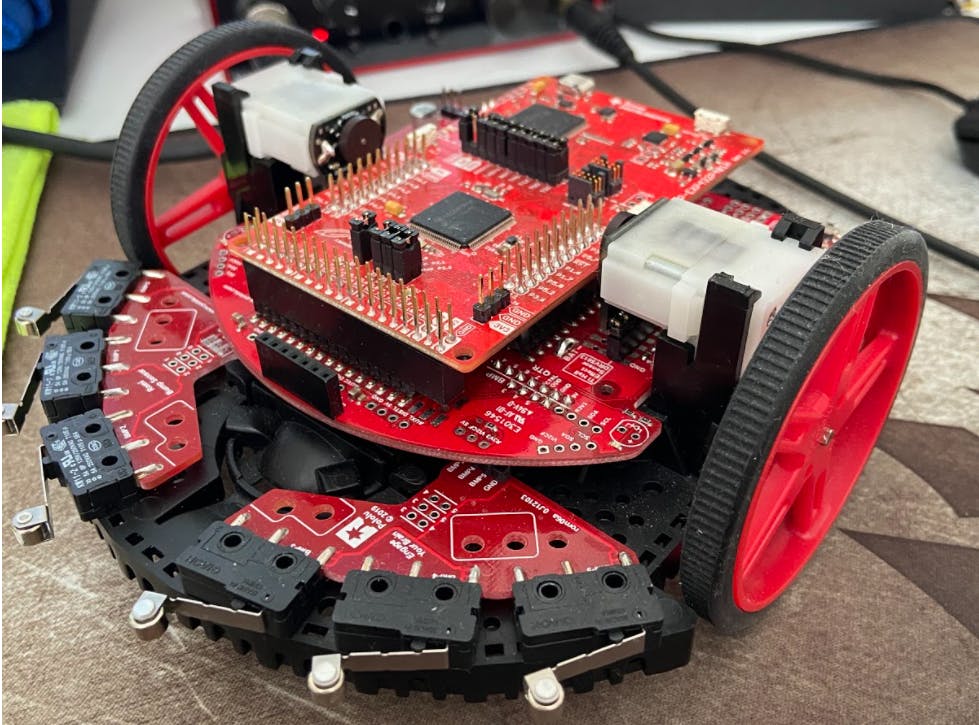
完全组装后的基本套件将如上图所示,其中包括以下内容:
该套件由 6 节 AA 电池供电,该电池不包含在套件中。
该套件本身功能齐全,因此请随时开始对随附的电机和碰撞传感器进行编程。您可以在此处找到入门指南:https ://university.ti.com/en/faculty/ti-robotics-system-learning-kit/ti-rslk-max-edition-curriculum
漫游者
TI RSLK 机器人由两个无刷直流电机驱动,每侧一个电机。机器人由其后部的单个全向球轮平衡。这种设计允许差速转向和精确转向。
在流动站上,每个电机都连接到旋转编码器和 DRV8838 H 桥电机驱动器。旋转编码器允许测量有关电机位置、速度和加速度的信息。H 桥允许有刷电机改变方向。通过使用 PWM 信号快速启用和禁用电机,可以控制每个电机的速度。PWM 信号通过在电机上产生平均电压来控制轮速。
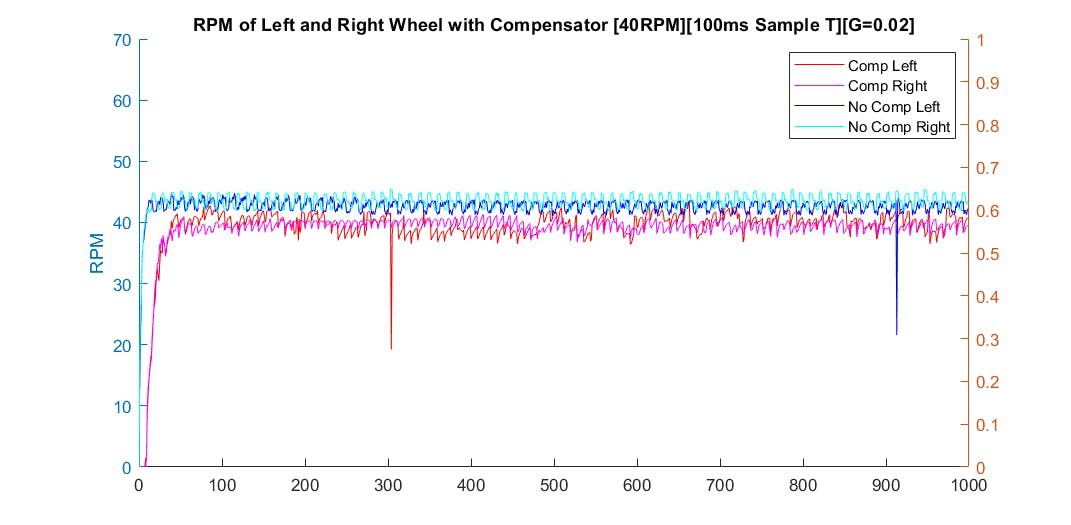
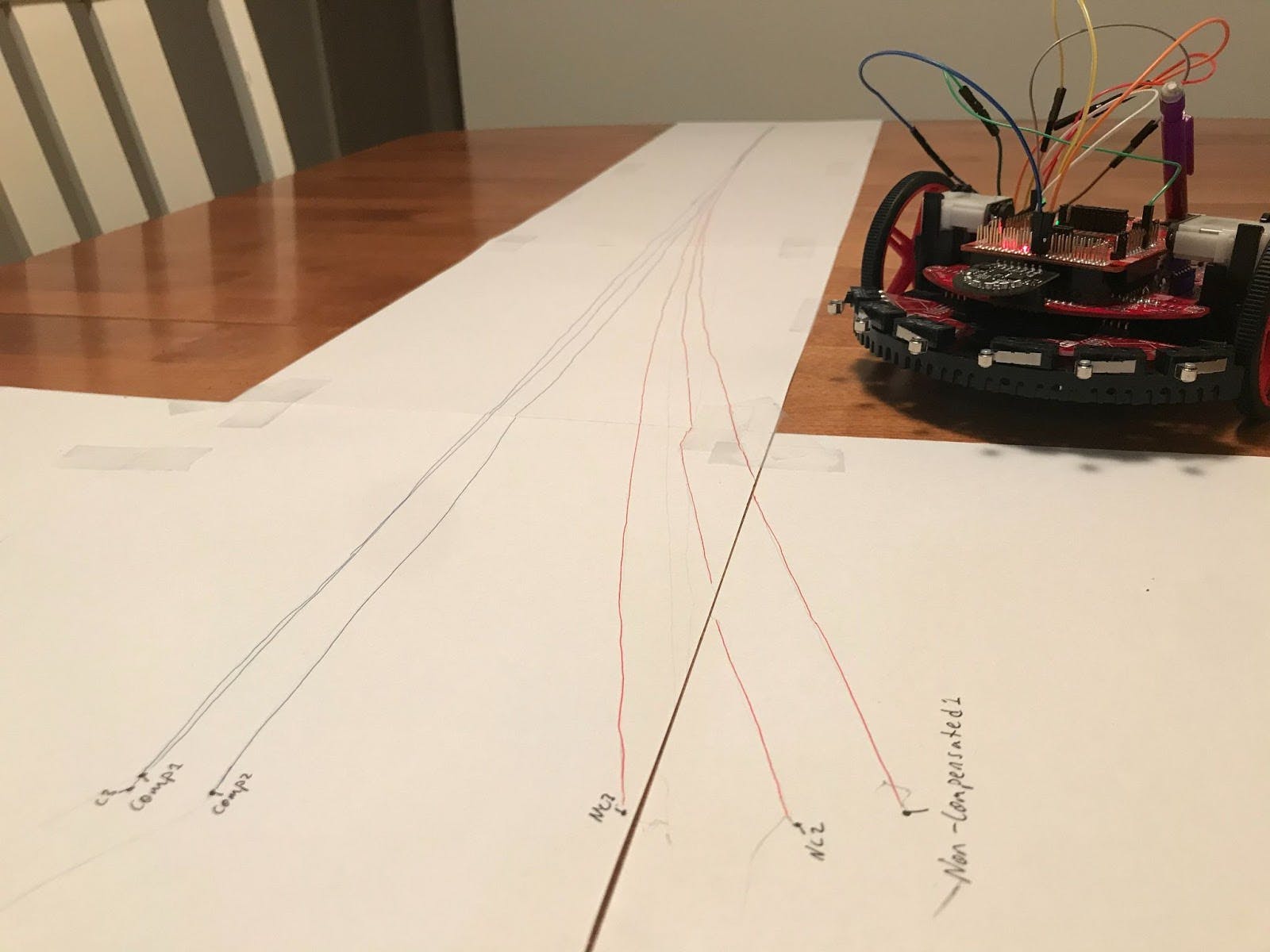
流动站还包含一个基本控制系统,使用编码器输出根据给定的 RPM 调整每个电机的速度。由于左右电机通常不完全相同,因此一个电机的运行速度通常比另一个电机稍高,控制系统旨在纠正这种情况。控制系统以一阶补偿器的形式实现。您可以在下图中看到补偿器的好处。
示例代码中提供了一个 PWM 库来提供基础。该 PWM 库允许用户简单地输入所需的频率、占空比和输出引脚。这个库是作为一个多用途库构建的,并且在抓手和流动站实施中都使用了。流动站移动的主要行为是向前、向后和向左或向右旋转。在每个行为中,都有单独的函数用于移动指定的时间和距离,或指定的度数用于旋转函数。该库还为您提供了实施控制系统的选项。
以下是一些函数示例:
// moveForwardForTimeComp
// robot moves forward for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void moveForwardForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
//nominal _rpm unit is deci rpm
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirForward(&right_wheel_data);
setWheelDirForward(&left_wheel_data);
rover_state = MOVING_FORWARD;
}
// moveBackwardForTimeComp
// robot moves backward for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void moveBackwardForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
//nominal _rpm unit is deci rpm
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirBackward(&right_wheel_data);
setWheelDirBackward(&left_wheel_data);
rover_state = MOVING_BACKWARD;
}
// rotateRightForTimeComp
// robot rotates to the right for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void rotateRightForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirForward(&left_wheel_data);
setWheelDirBackward(&right_wheel_data);
rover_state = ROTATING_RIGHT;
}
// rotateLeftForTimeComp
// robot rotates to the left for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void rotateLeftForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirForward(&right_wheel_data);
setWheelDirBackward(&left_wheel_data);
rover_state = ROTATING_LEFT;
}
碰撞传感器
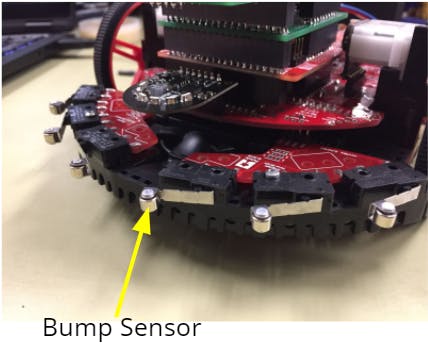
RSLK-MAX 基础套件中的碰撞传感器与 IR 传感器一起使用,可检测由于障碍物高度较低或光照条件差而导致 IR 传感器无法检测到的障碍物。
。
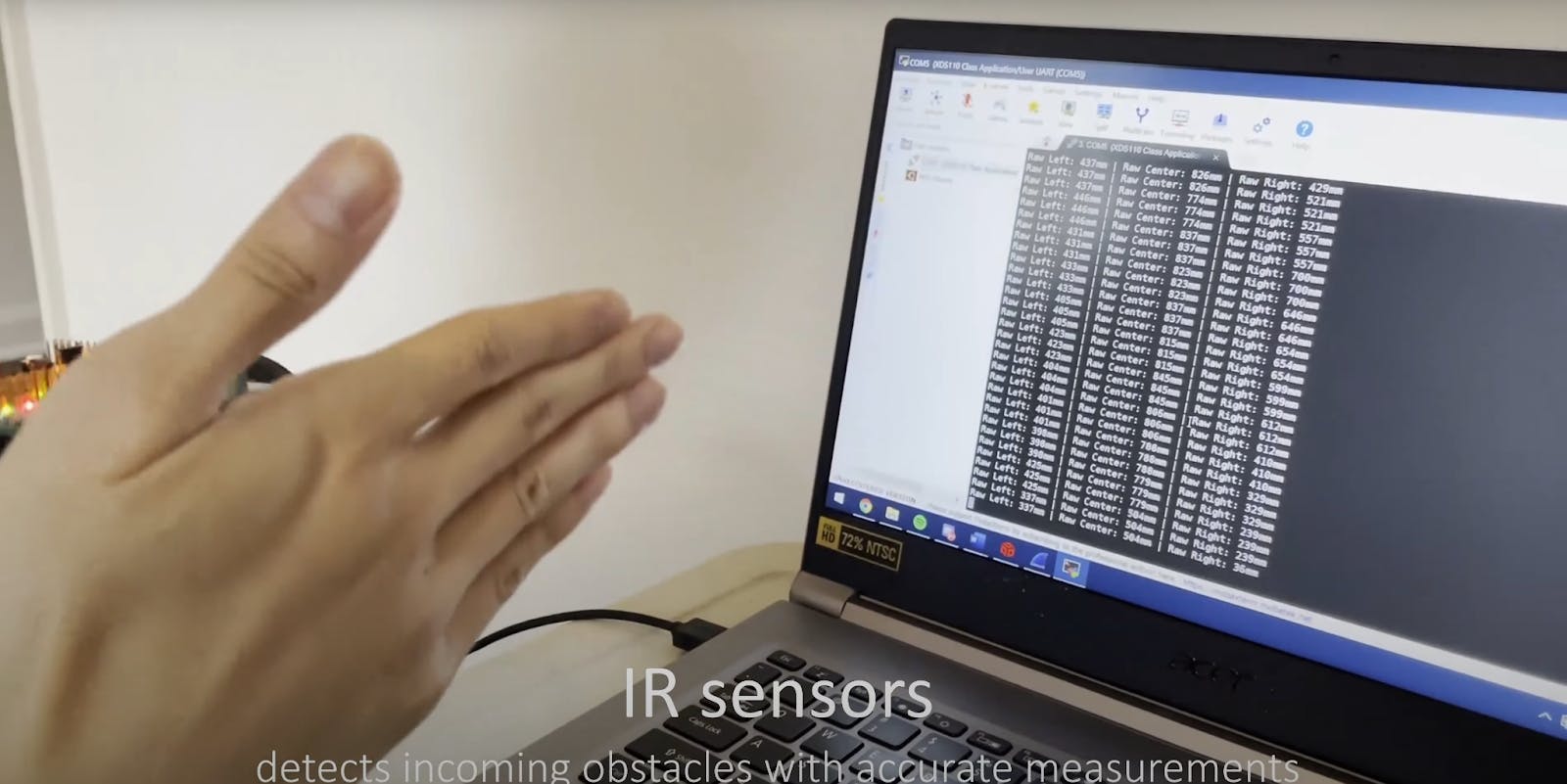
OPT3101 传感器阵列
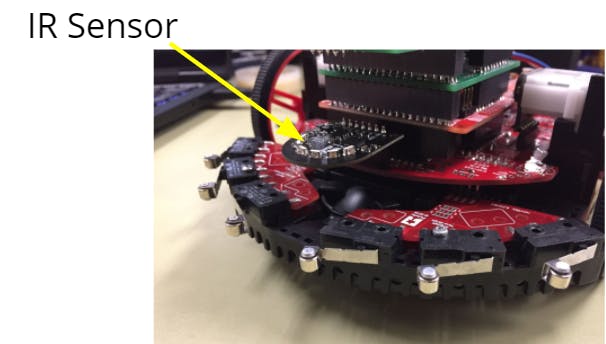
OPT3101 传感器阵列负责在 RoboNav 模式下检测流动站前方的障碍物,这是我们的自动驾驶系统。该组件上有三组传感器,它们利用飞行时间来确定传感器到任何障碍物的距离。您需要将随附的接头焊接到机器人的 PCB 上,以便将 IR 传感器安装到机器人的正面,如上图所示。
。
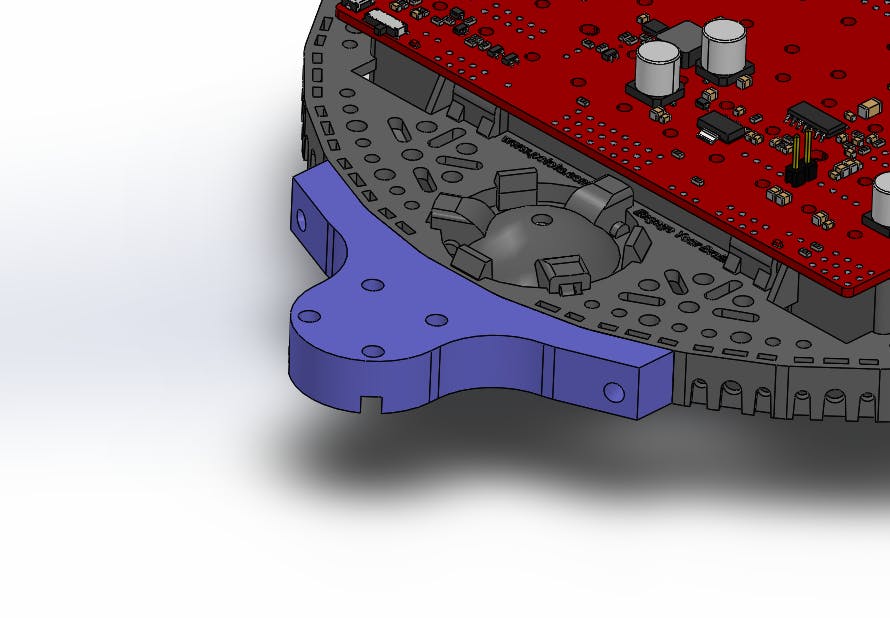
标准夹持器套件 A
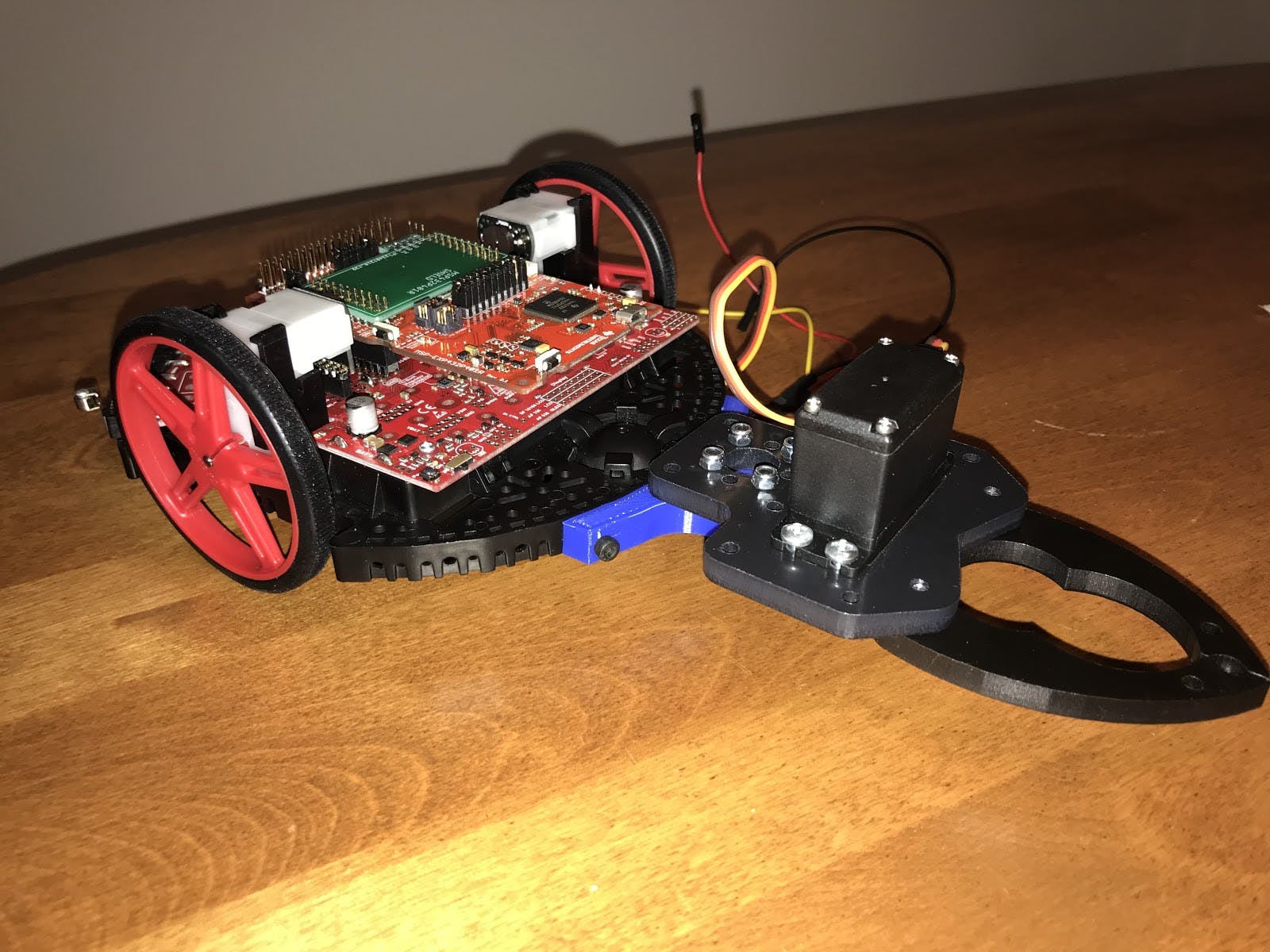
夹持器使用伺服电机以一个自由度打开和关闭手臂。手臂能够容纳一个标准的铝罐。它安装在底盘的后部,需要一个 3D 打印的安装支架进行组装。
以下是一些用于夹具功能的函数:
//opens the servo as defined by 'openDeg'
void openServo(Servo180 *servoSettings)
{
moveServoToDegree(servoSettings->openDeg, servoSettings);
}
//closes the servo as defined by 'closedDeg'
void closeServo(Servo180 *servoSettings)
{
moveServoToDegree(servoSettings->closedDeg, servoSettings);
}
//toggles between open and closed, as defined by 'closedDeg' and 'openDeg'
//if servo is not currently open or closed, the servo is moved to the open position
void toggleOpenClose(Servo180 *servoSettings)
{
if(servoSettings->degree == servoSettings->closedDeg)
openServo(servoSettings);
else if(servoSettings->degree == servoSettings->openDeg)
closeServo(servoSettings);
else
openServo(servoSettings);
}
- TI RSLK MAX增强CC3100 BoosterPack开源项目
- 如何使用遥控器控制TI-RSLK
- 用于TI RSLK MAX机器人平台的IR RX/TX BoosterPack
- 基于TI-RSLK的导航控制机器人 0次下载
- 使用TI RSLK MAX构建声音跟随机器人
- 机器人系统研讨会:TI RSLK MAX上的Arduino编程
- ECLinPS Max (SiGe) SPICE 建模套件
- TI-RSLK课程学习-0 课程简介与及资料下载
- MAX5051评估套件英文产品规格书 3次下载
- MAX2078的评估套件数据手册免费下载 0次下载
- MAX5944评估套件的数据手册免费下载 1次下载
- TI全新开发套件简化和消费电子产品的发布中文概述 15次下载
- 达芬奇软件开发套件的简化视频设计和GPON黄金时代的到来中文概述 4次下载
- TI 永磁同步电机驱动开发套件 69次下载
- TI_max3243e数据手册 8次下载
- MAX-IDE入门 955次阅读
- 利用USB至JTAG接口板编程MAX1441 1076次阅读
- DeepStream智能分析套件的安装方法 1801次阅读
- 基于AM64x处理器的评估套件SK-AM64 2407次阅读
- 什么是物联网开发套件?如何挑选物联网开发套件 5261次阅读
- dfrobotmicro:bit造物粒子入门套件简介 4405次阅读
- dfrobotMiniQ智能小车探索套件简介 1745次阅读
- fireflyAIO-3288C主板散热套件介绍 1144次阅读
- dfrobot Arduino套件介绍 2260次阅读
- dfrobotArduino官方配套套件 1403次阅读
- 电机控制软件开发套件启动新设计 1676次阅读
- Zynq UltraScale+ MPSoC ZCU102评估套件解决方案 8864次阅读
- 浅谈赛灵思 ISE 12设计套件的18问 1100次阅读
- 一文详解TI的grlib图形库移植到Atmel SAM4套件 4711次阅读
- 赛灵思Vivado设计套件震撼登场 1885次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论