 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
在本教程中,我们将学习如何轻松编程 Otto DIY 机器人以使其行走。
。
第 1 步:您需要什么
- Otto Robot,您可以在此处购买或在此处查看有关如何通过几个步骤构建它的说明。
- Visuino 程序:下载 Visuino
第 2 步:启动 Visuino,并选择 Arduino UNO Board Type

1 / 2
要开始对 Arduino 进行编程,您需要从此处安装 Arduino IDE:https ://www.arduino.cc/ 。
请注意,Arduino IDE 1.6.6 中存在一些严重错误。确保您安装的是 1.6.7 或更高版本,否则本教程将无法运行!如果您还没有按照本教程中的步骤设置 Arduino IDE 来对 Arduino Nano 进行编程!Visuino:https ://www.visuino.eu也需要安装。启动Visuino,如第一张图所示点击Visuino中Arduino组件(图1)上的“工具”按钮出现对话框时,选择“Arduino UNO”,如图2所示
第 3 步:在 Visuino 中添加组件
1 / 4
添加组件:
- 添加 2X“模拟值”组件
- 添加 2X“除以模拟值”组件
- 添加2X“正弦模拟发生器”组件
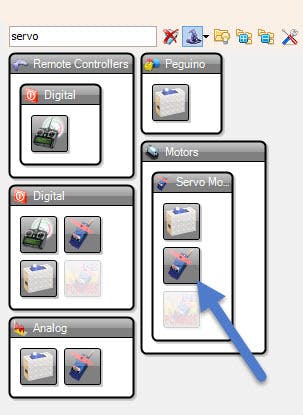
- 添加2X“伺服”组件
第 4 步:在 Visuino 设置组件中
1 / 5
- 选择“AnalogValue1”组件并在属性窗口中将“Value”设置为 20
- 选择“AnalogValue2”组件并在属性窗口中将“Value”设置为 20
- 选择“DivideByValue1”组件并在属性窗口中将“Value”设置为 180
- 选择“DivideByValue2”组件并在属性窗口中将“Value”设置为 180
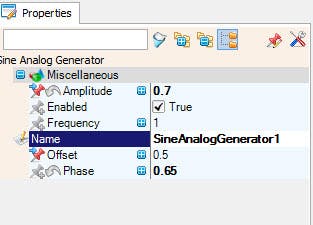
- 选择“SineAnalogGenerator1”组件并在属性窗口中将“相位”设置为 0.65,将“频率”设置为 1,将“偏移”设置为 0.5
- 选择“SineAnalogGenerator2”组件并在属性窗口中将“相位”设置为 0.5,将“频率”设置为 1,将“偏移”设置为 0.5
- 选择“Servo1”并将名称设置为“LR1”<<我们设置这个是为了便于理解。这意味着右腿
- 选择“Servo2”并将名称设置为“FR1”<<这意味着右脚
- 选择“Servo3”并将名称设置为“LL1”<<这意味着左腿
- 选择“Servo4”并将名称设置为“FL1”<<这意味着Foot Left
第 5 步:在 Visuino Connect 组件中
1 / 2
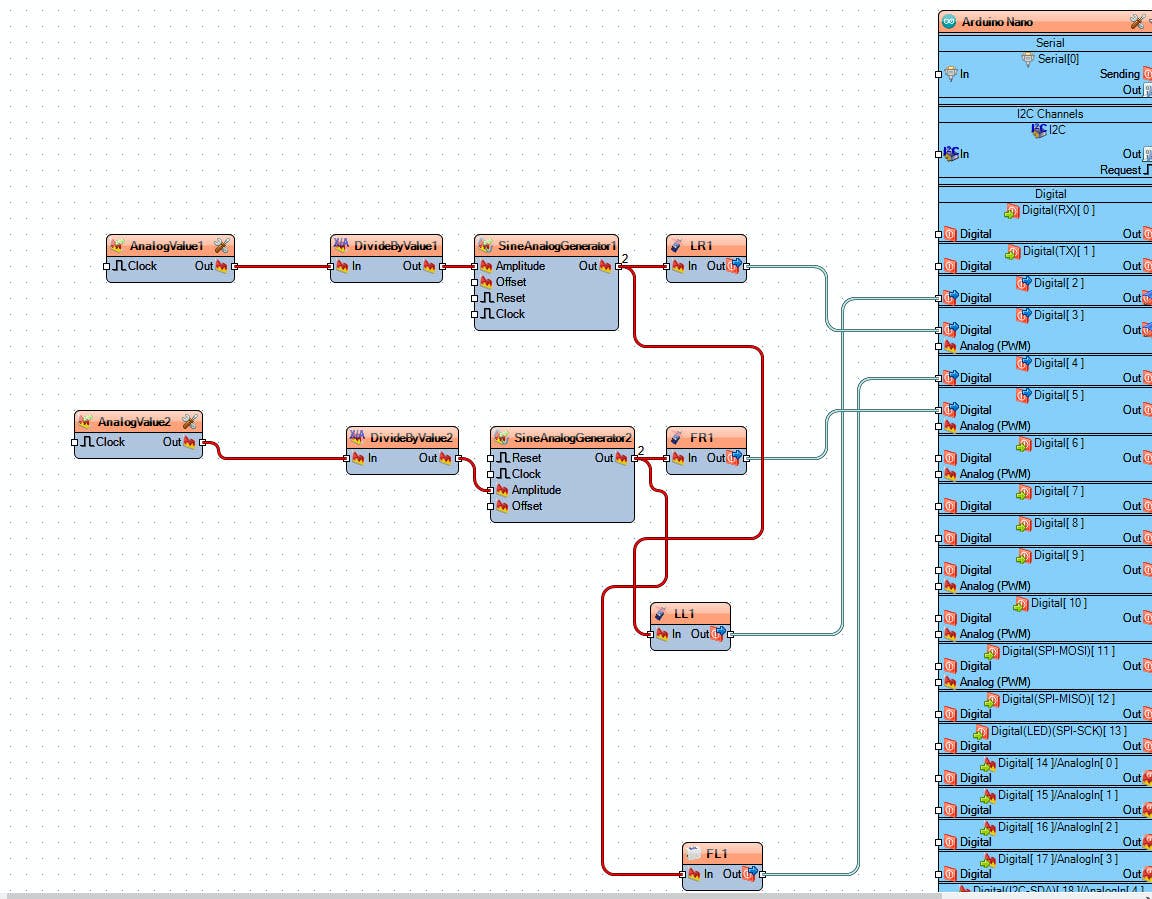
- 将“AnalogValue1”组件引脚 [Out] 连接到“DivideByValue1”组件引脚 [In]
- 将“AnalogValue2”组件引脚 [Out] 连接到“DivideByValue2”组件引脚 [In]
- 将“DivideByValue1”组件引脚 [Out] 连接到“SineAnalogGenerator1”引脚[Amplitude]
- 将“DivideByValue2”组件引脚 [Out] 连接到“SineAnalogGenerator2”引脚[Amplitude]
- 将“SineAnalogGenerator1”引脚[Out]连接到“LR1”组件引脚[In]和“LL1”组件引脚[In]
- 将“SineAnalogGenerator2”引脚[Out]连接到“FR1”组件引脚[In]和“FL1”组件引脚[In]
- 将“LR1”组件引脚 [Out] 连接到 Arduino 数字引脚 [3]
- 将“FR1”组件引脚 [Out] 连接到 Arduino 数字引脚 [5]
- 将“LL1”组件引脚 [Out] 连接到 Arduino 数字引脚 [2]
- 将“FL1”组件引脚 [Out] 连接到 Arduino 数字引脚 [4]
注意:请检查 Arduino 引脚 [2,3,4,5] 是否与伺服电机护罩(腿和脚)上的连接相匹配,并在必要时进行更改。
第 6 步:生成、编译和上传 Arduino 代码
1 / 3
在 Visuino 中,按 F9 或单击图 1 所示的按钮生成 Arduino 代码,然后打开 Arduino IDE
在 Arduino IDE 中:
- 点击菜单“工具”并选择板“Arduino Nano”(图2)
- 单击菜单“工具”并选择端口
- 单击菜单“工具”并选择端口
- 点击 Upload 按钮,编译并上传代码(图 3)注意:如果您在上传代码时发现一些问题,您可以点击 Menu Tools>Processor:..>ATMega328P (Old Bootloader)
第 7 步:播放
如果你给奥托机器人供电,它就会开始行走。
恭喜!您已经使用 Visuino 完成了 Otto 项目。还附上了我为本教程创建的 Visuino 项目,您可以在此处下载。您可以在 Visuino 中下载并打开它:https ://www.visuino.eu
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- Otto DIY Arduino蓝牙机器人易于3D打印
- 如何在家制作蜘蛛行走机器人
- KUKA机器人编程 0次下载
- DIY Edge Avoider机器人
- Otto DIY ESP32盾牌
- 库卡机器人有限公司培训资料之库卡机器人教程C2系统编程 9次下载
- 库卡机器人有限公司培训资料之库卡机器人编程C4教程 9次下载
- 如何实现温室内移动机器人自主行走的温室道路边缘检测与导航算法 17次下载
- 如何使用CPGs实现双足机器人的行走规划与控制 24次下载
- 工业机器人的详细资料和应用编程等培训资料概述 38次下载
- 基于Scratch和ROS的教育机器人编程与实现 10次下载
- 双足行走机器人步行原理是什么?步态轨迹规划的详细分析资料概述 101次下载
- DIY:简简单单自制平衡机器人 25次下载
- 基于DSP和模糊控制的寻线行走机器人设计
- 一种寻线行走机器人设计与实现
- 工业机器人的四种编程(示教编程、离线编程、自增强现实编程主编程)剖析! 229次阅读
- 机器人对TF电机要求有哪些 1274次阅读
- 工业机器人编程入门_工业机器人的编程要求 9571次阅读
- 焊接机器人编程好学吗_前景怎么样 1.6w次阅读
- 常用的机器人编程方法有哪些 1.5w次阅读
- 机器人底盘的主要三大技术 8064次阅读
- 机器视觉的机器人取代四台传统的火焰处理机器人 3270次阅读
- 机器人十大流行编程语言的介绍及机器人编程系统以及操作方法 4.2w次阅读
- 浅析机器人离线编程软件的优势和主流编程软件的功能及优缺点 1.3w次阅读
- 甲壳虫机器人diy制作详解 3776次阅读
- 电科大机器人研究中心研发出第四代外骨骼机器人 4951次阅读
- 机器人离线编程与机器人编程趋势 6064次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.4w次阅读
- 焊接机器人编程入门与编程技巧介绍 8.4w次阅读
- 对《工业机器人编程指令详解》的详细介绍 1.8w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1美的电磁炉维修手册大全
- 1.56 MB | 5次下载 | 5 积分
- 2SMD LED选型手册 贴片灯珠
- 5.47 MB | 3次下载 | 免费
- 3基于PLC的拉丝机张力控制系统研究
- 0.14 MB | 2次下载 | 5 积分
- 4LZC3106G高性能谐振控制器中文手册
- 1.29 MB | 1次下载 | 1 积分
- 5JL2233B集成电平转换功能的LDO中文手册
- 0.50 MB | 1次下载 | 免费
- 6加密芯片的一种破解方法和对应加密方案改进设计
- 0.29 MB | 1次下载 | 免费
- 7万用表UT58A原理图
- 0.09 MB | 1次下载 | 5 积分
- 8BOSCH-REXROTH300拧紧系统常见故障及处理方法
- 0.06 MB | 次下载 | 5 积分
本月
- 1使用单片机实现七人表决器的程序和仿真资料免费下载
- 2.96 MB | 44次下载 | 免费
- 2UC3842/3/4/5电源管理芯片中文手册
- 1.75 MB | 19次下载 | 免费
- 3华瑞昇CR216芯片数字万用表规格书附原理图及校正流程方法
- 0.74 MB | 14次下载 | 3 积分
- 4DMT0660数字万用表产品说明书
- 0.70 MB | 13次下载 | 免费
- 53314A函数发生器维修手册
- 16.30 MB | 13次下载 | 免费
- 6TPS54202H降压转换器评估模块用户指南
- 1.02MB | 8次下载 | 免费
- 7STM32F101x8/STM32F101xB手册
- 1.69 MB | 8次下载 | 1 积分
- 8感应笔电路图
- 0.06 MB | 7次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935119次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420062次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233084次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191367次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183335次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81581次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73807次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65987次下载 | 10 积分





 工商网监
工商网监
评论