 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
-M-G370PDS0改善了短期噪音,扩大了型号阵容,并提供了更广泛的产品选择-

精工爱普生公司(“爱普生”,TSE:6724)已经开发并正在运送M-G370PDS0的样品,这是一种配备高性能六轴传感器的新型惯性测量单元(IMU)1。新产品的批量生产计划于2022年春季进行。
爱普生的IMU于2011年首次推出,已用于一系列客户应用,因其出色的性能和质量而享有盛誉。近年来,IMU的使用已扩展到无人系统的测量、航空和水下视频摄影等领域,对更精确的位置和姿态控制的需求日益增长。因此,对提供更高精度的IMU的需求正在上升,这在姿态控制中至关重要,尤其是噪声性能。M-G370PDS0的角度随机游走2(输出的短期变化)为0.03°/√h,是其前身的一半,并且可以更准确地检测设备和系统姿态的微小变化,因为它们不会在传感器噪声中丢失。该IMU的体积小、重量轻、功耗低,将帮助客户使自己的产品更小、更轻。
新的IMU保持了与早期产品(M-G370/365/364/354)的兼容性,使性能升级变得容易。
产品特点
配备低噪音、高性能传感器,保持爱普生之前IMU的高稳定性
角度随机游走0.03°/√h
噪声密度:2.5(°/h)/√Hz
卓越的动态性能(比例因子非线性),适用于从静态到高速运动的高精度测量
保持与早期IMU(M-G370/365/364/354)的兼容性,大幅降低客户开发成本和评估时间
低电流消耗:16mA
产品应用
相机、天线等的减振。
工业设备的振动、角度、轨迹测量等。
导航系统(GNSS3、INS4、高精度定位器)等。
产品规格
| Previous Products | New Product | ||
| Model No. | M-G370PDF1 | M-G370PDS0 | |
| Rate range | Gyroscopic sensor⁵ | ±450/s | ±200/s |
| Accelerometer | ±10G | ±10G | |
| Accuracy and stability | Gyro bias instability⁶ | 0.8°/h | 0.8°/h |
| Angle random walk | 0.06 %h | 0.03 %Wh | |
| Gyro noise density | 4.7(°/h)/Hz,rms | 2.5(°/h)/NHz,rms | |
| Initial bias | Gyroscopic sensor | 360/h,o | 360 %h,σ |
| Accelerometer | 2 mG,o | 2 mG,o | |
| Interfaces | SPI&UART | ||
| Output resolution | 16-bit/32-bit | ||
| Data output rate | 2000 Sps | ||
| Operating temperature range | 40℃ to+85℃ | ||
| Current consumption | 16 mA (3.3V) | ||
| Size | 24x24x10 mm | ||
词汇表
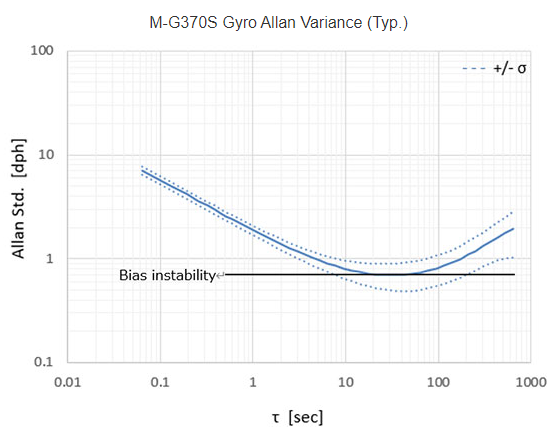
艾伦方差
作为传感器性能的指标,Allan方差表示静态输出的稳定性。横轴表示数据的平均时间,纵轴表示平均值除以平均时间后的分布。已知Allan方差中出现的特征的斜率为-1、-1/2、0、1/2和1次幂斜率,Allan方差与噪声密度相关,噪声密度是频率。Allan方差是一个用时间表示的指标。值越小,稳定性越高,性能越好。
1惯性测量单元(IMU)
IMU是一种用于感测惯性运动的设备。它由三轴角速度传感器和三轴加速度计组成。
2角度随机游走
斜率为-1/2的Allan方差部分称为角度随机游走。由于与白噪声存在相关性,增加平均时间会使平均时间的-1/2处的值减小。
3全球导航卫星系统(GNSS)
一种卫星系统,用于精确定位世界任何地方的地理位置
4惯性导航系统(INS)
5陀螺仪传感器(角速度传感器)
测量单位时间内物体相对于参考轴的旋转角度(角速度)。
6偏置不稳定性
Allan方差中代表水平(零幂)特性的部分称为偏置不稳定性。它与1/f噪声相关,是传感器电位的重要指标之一。
- 爱普生开发用于大坝和河流泄洪闸设备监测的新型3轴振动传感器M-A342VD10和M-A542VR10
- 惯性测量单元M-G370系列广泛用于工业系统各个领域
- 爱普生的惯性测量单元(IMU)M-G370PDT成为无人驾驶的理想选择
- 爱普生推出适用于物联网小尺寸温补晶振TG1612SLN
- 日本宇宙航空研究开发“Int-Ball2”自由飞行相机机器人采用的Epson IMU
- 针对工业应用的抗振动和姿态控制的陀螺仪传感器:XV7021BB
- 爱普生转换器的低功耗16位微控制器
- 爱普生发布一款16位MCU产品用于大电流LED驱动
- 《抑制开关磁阻电机振动的结构设计研究》pdf 3次下载
- 《内燃机噪声振动与控制》.pdf 0次下载
- 多旋翼飞行器设计与控制的坐标系和姿态表示 0次下载
- 基于自抗扰解耦模型的四旋翼姿态控制器 5次下载
- 振动控制系统中DSP后向通道的设计方案 14次下载
- 基于深度学习的二维人体姿态估计方法 5次下载
- ADIS16300四自由度IMU在姿态测量中的应用
- 使用爱芯派Pro开发板部署人体姿态估计模型 1149次阅读
- 一种易于实现的无外部设备IMU校准方法 1182次阅读
- ImPosing:用于视觉定位的隐式姿态编码 472次阅读
- MEMS IMU/陀螺仪对准的基础知识 4384次阅读
- 振动传感器XDZ-01构成的基本振动报警电路 3304次阅读
- 基于LabWindows/CVI平台和开发板实现多点随机振动试验系统的设计 1597次阅读
- 振动传感器测量振动的方式_振动传感器故障排除 4305次阅读
- 基于MEMS技术的IMU惯性测量单元的工作原理解析 1.1w次阅读
- 惯性测量装置IMU的用途_IMU在主机应用处理器的功能 1w次阅读
- 深度解析无人机的工作原理 10.1w次阅读
- IMU中传感器的功能_IMU应用实例_IMU解决方案 2.7w次阅读
- 全姿态增稳控制系统:意在改进无人机的稳定性 5017次阅读
- mpu6050姿态解算原理_mpu6050姿态解算程序 4.3w次阅读
- 基于STM32的四旋翼飞行姿态串级控制的设计与实现 7665次阅读
- 基于低采样率控制系统的振动抑制设计方案 1632次阅读
 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论