 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
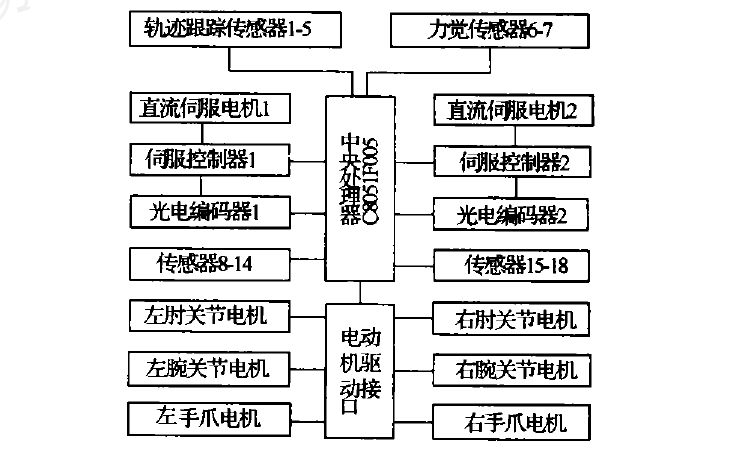
介绍了一例非完整约束轮式移动机器人机械结构及控制系统软硬件的设计。采用美国Cygnal公司新研制的C8051F005 单片机作为机器人控制系统的CPU 及瑞士MAXON 公司的直流伺服电机作为双轮驱动单元,利用非完整约束条件和非完整约束运动规划原理,研制了一例非完整约束轮式移动机器人,该机器人可跟踪任意直线、圆弧曲线轨迹等,也可实现原地零半径旋转及任意轨迹运动。运动自主灵活。对直线及圆弧轨迹进行了跟踪实验。
目前,移动机器人已广泛用于科学考察、地质勘探、灾难营救等多个领域,对人类了解地球、征服自然、探索宇宙具有重要意义。同时,也是代替人们在有辐射、有粉尘和有毒等环境中作业必不可少的工具。移动机器人的典型行走形式有轮式、履带式和腿足式等。
轮式移动机器人系统是典型的非完整约束机械系统。利用非完整约束条件和非完整运动规划的原理,研究开发新型的具有良好的目标轨迹跟踪和控制性能轮式移动机器人系统,在机器人领域下成为一个新的研究热点。轮式机器人其实与车辆极为相似,因此对于轮式移动机器人的研究以及无人驾驶车辆的发展都有重大的意义。通过研制一台轮式移动机器人AeroAcer ,对直线及圆弧等目标轨迹进行了跟踪试验。
根据需要,AeroAcer 轮式移动机器人结构包括:行走驱动部、躯干、手臂及手爪。行走驱动部结构如图1 所示,采用两轮独立驱动的结构,并使AeroAcer 的形心和质心对地平面的投影落于两个驱动轮轴线上。驱动轮分别由两套直流伺服系统驱动,提供需要的转速或者力矩;前后对称于驱动轮轴线各布置一万向轮,可任意移动而不会对AeroAcer 产生阻力和约束作用,这样,只要分别控制两个驱动轮的不同的速度或者力矩,就可以使AeroAcer 按照所要求的方向和速度移动,从而实现运动规划、稳定以及跟踪等控制任务。驱动轮轴线经过底盘的形心的投影,可实现零转弯半径,同时也使轨迹规划及控制相对简单。另外,驱动轮轴线过质心的投影,可大大地提高驱动电机的效率。内带减速齿轮的驱动电机固定在车架上,两个驱动车轮也分别通过轴架固定在车架上。电机的输出轴驱动车轮。连接在电机上的圆光栅在电机运转时产生相位上相差90 度的脉冲信号,通过对此脉冲信号进行检测和运算,就可得到AeroAcer 的位置、速度等状态量。选用了500 线的圆光栅,即电动机每旋转一周输出500 个脉冲,由于采用33 :1 的减速齿轮,因此车轮每转动一周圆光栅将输出33 ×500 = 16500 个脉冲,具有相当高的精度。选择圆光栅的目的在于:一方面将圆光栅产生的脉冲信号经过伺服放大器内的频压变换得到电机的速度用于速度反馈以形成速度闭环,同时还可以对脉冲信号经过计数、运算获得AeroAcer 的位置和速度,简化了系统设计,节省了成本。由于直流伺服电机具有启动力矩大,动态性能好,调速范围宽和控制较为简单等一系列优点[2 ] 。因此在AeroAcer 中选用瑞士MAXON 公司的直流伺服电机作为驱动单元,包括带有减速齿轮的直流电机、伺服放大器以及用作速度反馈和检测的圆光栅。电机可以工作在速度方式和力矩方式,可以运行在由速度和加速度决定的四个象限,从而可以在该装置上针对AeroAcer 的运动学和动力学模型进行实验研究。其中,伺服放大器根据电机的转速或电流调整输出到电机的电压,从而控制电机的转速、力矩等。系统所使用的是ADS50/ 5 伺服放大器。
- 一种全新的轮式移动机器人轨迹跟踪控制算法 14次下载
- 如何使用模糊PID的轮式移动机器人进行轨迹控制 37次下载
- 轮式移动机器人控制系统设计的设计论文资料免费下载 4次下载
- 如何使用Web移动机器人控制系统研究及Java实现资料说明 5次下载
- 轮式移动机器人运动控制研究现状的介绍及其设计介绍 16次下载
- 移动机器人的分类与移动机器人技术研究现状和未来发展的分析 13次下载
- 可载人自平衡移动机器人控制系统设计李京涛 0次下载
- 基于Arduino的移动机器人控制系统设计_彭攀来 5次下载
- 全自主移动机器人控制系统研究 0次下载
- 移动机器人及其控制系统研制 0次下载
- 轮式移动机器人WMR的运动分析 33次下载
- 基于无线局域网的移动机器人远程控制系统
- 基于模糊PID的轮式移动机器人轨迹控制
- 基于车体加速度反馈的轮式移动机器人轨迹跟踪控制研究
- 四轮式移动机器人非完整运动控制
- 智能移动机器人系统方案指南 1.8k次阅读
- 基于ARM处理器和CPLD技术实现智能移动机器人系统设计 1.5k次阅读
- 基于51单片机的自动巡线轮式机器人控制系统 5k次阅读
- 移动机器人是如何定位的 4.9k次阅读
- 移动机器人控制系统的发展方向 1.9k次阅读
- 移动机器人控制系统设计与仿真 4.2k次阅读
- 嵌入式Linux移动机器人控制系统 5k次阅读
- 仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop 7k次阅读
- 移动机器人的机构与分类分析 8.9k次阅读
- 如何区分机器人、协作机器人和移动机器人? 7.7k次阅读
- 基于PLC的机器人伺服运动控制系统设计详解 1.7w次阅读
- 基于嵌入式的轮式移动机器人设计方案 4.2k次阅读
- 自主移动机器人的定位与地图创建(SLAM)关键性问题 2.2k次阅读
- 基于LPC2119的自主式移动机器人设计 2.7k次阅读
- 基于FPGA技术的全方位移动机器人运动控制系统的方案设计 1.4k次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1497次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 98次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 14次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7蓝牙设备在嵌入式领域的广泛应用
- 0.63 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 6接口电路图大全
- 未知 | 30321次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21540次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183278次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费



 工商网监
工商网监
评论