完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 伺服控制
伺服控制是为满足某种目的,产生运动和对物体运动进行控制是我们人类最重要的活动之一。伺服控制是对物体运动的位置、速度及加速度等变化量的有效控制。所谓伺服控制指对物体运动的位置、速度及加速度等变化量的有效控制。这种控制已在各领域得到普及。
文章:93个 浏览:20550次 帖子:34个
位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
无论是同步轮结构还是齿轮齿条结构,都存在加工精度误差。运动控制卡(PLC)并没有设置准确的脉冲当量。例如上一批同步轮电机旋转一圈设备前进10mm,这批同...
说明:FB块包含16个点位的定位 手自动,以及16个点位的定位完成信号,每个点位有单独的位置和速度 JOG也有单独的速度 触摸屏的使能 JOG 原...
在伺服控制系统设计或是伺服电机的选型过程中,常常需要考虑惯量问题,惯量是影响伺服系统响应速度和稳定性的重要因素。总的来说,是希望系统的总体惯量越小越好,...
在选用时要注意,交流伺服电动机的速度是可调节的,且在相当大的转速范围内电动机输出的转矩是恒定的,故选用电动机时只要电动机的额定转速大于各轴所需的最高转速就行。
在工业电机或伺服控制应用中,准确的电流测量是控制回路的关键部分。电流测量不仅需要尽可能准确,而且还需要安全可靠。工业电机或伺服控制系统通常包含高压,并且...
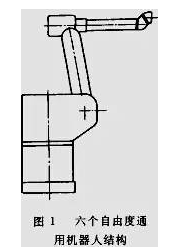
工业机器人的使用越来越广泛,即使是普通群众,对工业机器人也愈来愈了解。就普通人而言,对工业机器人的认识大多停留在感性认识层面,对工业机器人的相关技术却未...
力矩控制模式,电机电流大小受控,速度不受控,负载力矩小时,速度就快,反之,负载力矩大时,速度就慢,速度的大小处于被动变化,而电流、力矩是主动变化;
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身...
所谓定位,就是要让伺服电机走到一个确定的位置。这个位置可以是增量式的,也可以是绝对式的。打个比方,我们现在在路上,我们要往前走10米,相当于我们的位置要...

三菱FX3U定位控制和伺服应用技术的详细介绍和原点回归指令说明
通过PLC给伺服驱动器发驱动脉冲,通过改变脉冲频率来控制移动速度,通过改变脉冲数量来改变移动量,控制步进电机移动方向。 伺服驱动器是执行机构,在接收到...
再确定伺服的行走速度:(1).伺服电机额定转速3000r/min(50Hz),即50r/s;(2).伺服电机额定发出的脉冲数,50*2500=12500...
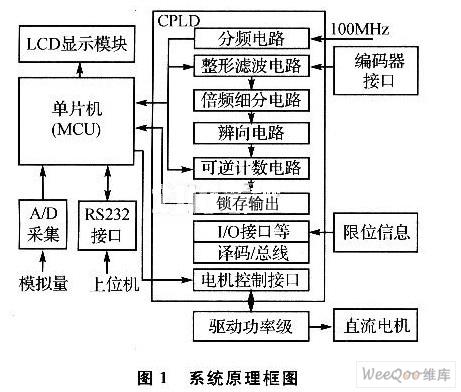
设计基于高速单片机C8051F120和CPLD的高精度大型望远镜的伺服控制器,由单片机实现闭环控制算法、上位机通信和LCD显示控制,CPLD实现增量式编...
电液伺服控制技术作为连接现代微电子技术、计算机技术和液压技术的桥梁,已经成为现代控制技术的重要构成。由于它具有线性好、死区小、灵敏度高,动态性能好、响应...
一、数控铣床,打开电源和系统,伺服电机嗡嗡响,响几分钟之后伺服电机会发热,调小刚性后不响了,但铣出来的圆不像圆,该怎样调? 应该是几台驱动器设置的增益...
TMC4671基于硬件FOC伺服电机控制芯片适应BLDC/PMSM等
全球领先的嵌入式运动控制公司德国TRINAMIC MOTION CONTROL 将于近期推出其最新的伺服控制芯片TMC4671。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目...

在大型光电跟踪设备中由于跟踪算法复杂,分系统众多,要求伺服控制模块不仅精度高、速度快、可靠性强,而且要有丰富的外围总线接口。考虑可靠性,选用PCI04...
运动控制起源于早期的伺服控制,本文与读者分享的是运动控制的定义、运动控制系统的基本架构组成以及在运动控制方面几项运动所需控制轨迹等
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

