完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 惯性导航
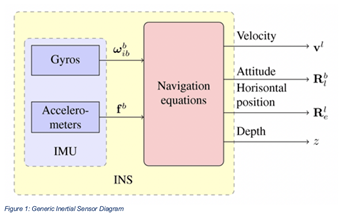
惯性导航系统(INS,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。
文章:38个 浏览:13583次 帖子:5个
随着科技的持续进步,高性能MEMS IMU成为导航技术领域的关键组件。其中,ER-MIMU-02Mini能实时提供物体的加速度与角速度数据,这些数据通过...
舰艇惯导系统通过惯性测量装置获取舰艇运动参数,实现自主、连续、隐蔽的导航,提供航向、速度等关键信息。未来趋势包括高精度化、多传感器融合和自主导航能力提升...

基于ST ASM330LHH MEMS Sensor系列的智能座舱高精度惯性导航方案
ST汽车级六轴惯性传感器ASM330LHH系列,为先进的车载导航和资讯服务系统提供超高分辨率运动跟踪功能。ASM330LHH系列能够满足惯性导航对车辆定...

安森德低压差线性稳压器ASPL7550用于惯性导航,输出电流150mA,输出电容2.2μF
随着科技的发展,如今的导航也是越来越精准,每当汽车进入高速路的隧道时,需要对汽车进行精准的定位,为了计算出汽车在隧道的位置和速度,从而有了惯性导航一说。...
随着科技的发展,如今的导航也是越来越精准,每当汽车进入高速路的隧道时,需要对汽车进行精准的定位,为了计算出汽车在隧道的位置和速度,从而有了惯性导航一说。...
上一期中挑选了国外三家知名的IMU厂商的主流IMU产品进行盘点分析。可以看到,国外主流的IMU厂商都在精度和低耗上下足了功夫,同时都在发力向高端IMU市...
无人机、无人车、无人船、机器人等代表性无人系统的智能自主控制是当前自动控制领域的研究热点,更是提升无人系统自主性和智能化水平的核心技术。自主导航技术利用...
惯性导航系统(INS,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的一种自主式导航系统,主要由陀螺仪和加速度计两部分组成。
车载系统中惯导的应用 从惯性导航的定义来看,惯性导航是一种通过测量飞行器的加速度,并自动进行积分运算,获得飞行器瞬时速度和瞬时位置数据的技术。组成惯性导...
通过测量飞行器的加速度(惯性),并自动进行积分运算,获得飞行器瞬时速度和瞬时位置数据的技术。 17世纪,I.牛顿研究了高速旋转刚体的力学问题。牛顿力学定...
捷联式惯性导航系统,其惯性测量装臵(加速度计和陀螺仪)直接装在飞 行器、舰艇、导弹等载体上,载体转动时,加速度计和陀螺仪的敏感轴指向也跟随转动。陀螺仪测...
惯性导航系统(INS)是一种自主式的导航设备,能连续、实时地提供载体位置、姿态、速度等信息;特点是不依赖外界信息,不受气候条件和外部各种干扰因素。 惯性...
GPS组合惯导的发展史 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导...
惯性导航系统有如下优点: 1、由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好,也不受外界电磁干扰的影响 2、可全天候、全时间地...
在做惯性导航模块或者飞控的时候第一件事就是器件的选取,这个是第一步也是很重要的一步,因为他不仅关系到硬件成本还关乎到你最终产品的性能。
如何区别INS和IMU的区别呢? 通过测量飞行器的加速度,并自动进行积分运算获得飞行器瞬时速度和瞬时位置数据的技术。组成惯性导航系统的设备都安装在运载体...
惯性导航的精度和误差解说 惯性导航的误差积累因为新的位置信息会以先前计算的位置信息和测量得出的加速度、角速度为基础进行计算,从我们将初始位置输入时起,积...
IMU惯导系统中都有什么? 前几篇的博客文章小编写了些感关于imu和insimu与加速度计之间的关系,imu和ins之间的区别。 这次主要根据我收集的一...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS | harmonyos |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1