完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 数据帧
文章:40个 浏览:6728次 帖子:14个
CAN-bus总线是应用最广泛的现场总线之一,而很多非常熟练的CAN工程师,面对一条CAN报文到底有多少位的问题时,却不能非常准确地回答。今天我们就从最...
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用...
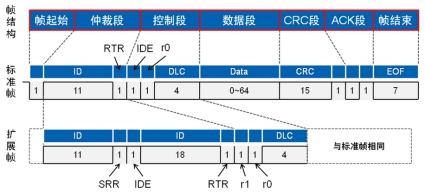
CAN协议可以接收和发送11位标准数据帧和29位扩展数据帧,CAN标准数据帧和扩展数据帧只是帧ID长度不同,以便可以扩展更多CAN节点。
很少看到有资料写如何以中断的方式发送一帧数据,如果以等待的发送 数据帧 ,对高速运行的 单片机 来说是很浪费时间的,下面就介绍一种使用中断方式发送数据帧...
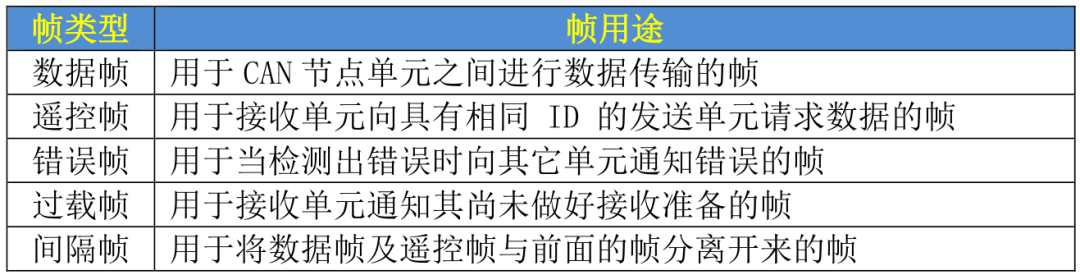
通过 CAN 总线传输数据是需要按照一定协议进行的,CAN 协议提供了 5种帧格式来传输数据:数据帧、遥控帧、错误帧、过载帧和帧间隔。其中数据帧和遥控帧...

错误帧由两个不同的场组成,第一个场是不同节点提供的错误标志(Error Flag)的叠加,第二个场是错误界定符。
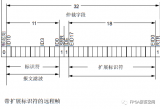
SRR 位应为隐性,以允许正在发送标准CAN 远程帧的节点发出显性RTR 位。SRR和lDE位之后是标识符的其余18位(扩展lD)及一个远程发送请求位。...
数据传输是由数据源节点自主完成的。但也可能存在目标节点向源节点请求发送数据的情况。要做到这一点,目标节点需发送一个远程帧,其中的标识符应与所需数据帧的标...
CAN总线使用帧的方式进行数据传输。每个数据帧包含一个标识符(ID)字段、控制字段、数据字段和校验字段。标识符用于将不同的消息区分开来,控制字段用于指示...

以下是采用此种数据帧格式的从机单片机程序,发送、接收均采用中断方式。设单片机的晶振频率为11.059 2MHz,通信的波特率为9 600bit/s,主机...
CAN(Controller Area Network)是一种广泛应用于汽车、工业控制和通信领域的串行通信总线标准。CAN数据帧是CAN总线上传输数据的...
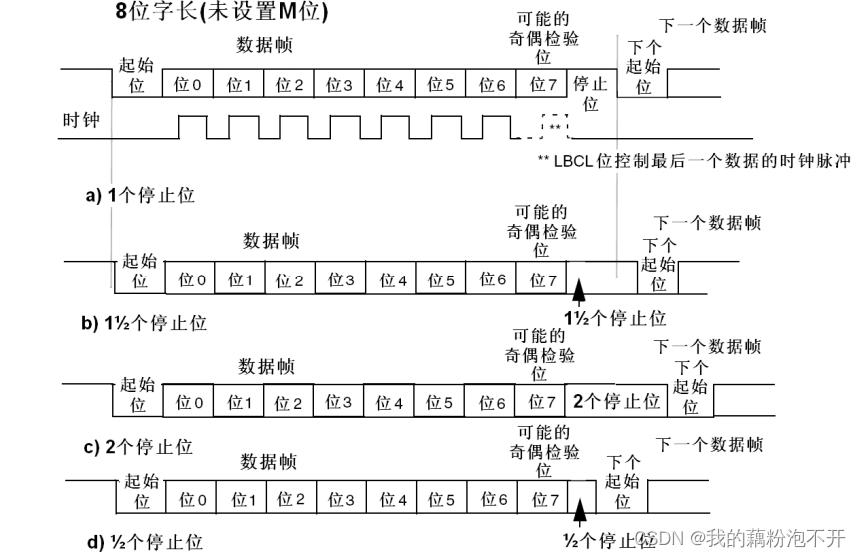
STM32里的串口通信 在STM32里,串口通信是USART,STM32可以通过串口和其他设备进行传输并行数据,是全双工,异步时钟控制,设备之间是点对点...
串口通讯时的数据帧格式和通讯协议是两个不同的概念,它们在串口通讯中起着不同的作用,但都是为了实现可靠的、有效的数据传输。
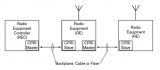
CPRI 是无线通信里的一个标准协议,连接 REC 和 RE 的通信。AMD 有提供 CPRI IP 核。区别于其它通信协议,如以太网等,CPRI 是一...
CAN(Controller Area Network)总线是一种用于汽车和工业自动化领域的通信协议,具有高可靠性、实时性和灵活性。CAN总线的传输速率...
数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下简称 ID), 扩展格式有 29 个位的 ID。
Polars 是一个使用 Apache Arrow 列格式作为内存模型,用Rust实现的,在Rust, Python以及Node.js中均可使用的速度极...
CAN(Controller Area Network)是一种用于汽车电子系统中的通信协议,它具有高可靠性、实时性和灵活性等特点。在CAN通信中,数据帧...

EtherCAT是一个高实时性,高速和高效率的工业以太网技术,数据根据自身独有的数据帧格式进行可靠传输,本文主要针对EtherCAT的数据帧格式和寻址方...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

