完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 智能车
(Intelligent Car)是电子计算机等最新科技成果与现代汽车工业相结合的产物,因而“善解人意”。通常具有自动驾驶,自动变速,甚至具有自动识别道路的功能。
(Intelligent Car)是电子计算机等最新科技成果与现代汽车工业相结合的产物,因而“善解人意”。通常具有自动驾驶,自动变速,甚至具有自动识别道路的功能。另外,车内的各种辅助设施也一应电脑化,常常给人以新奇感。
(smart car)飞思卡尔杯全国大学生智能汽车竞赛[1] 对智能汽车的简称
全国大学生“恩智浦”杯智能汽车竞赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以单片机为核心的大学生课外科技竞赛。组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,最快跑完全程而没有冲出跑道并且技术报告评分较高为获胜者。其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识。2015年恩智浦半导体收购飞思卡尔,比赛同时改名恩智浦杯。
传统具体分为四个组别,但每年比赛都有创意组发挥。
(Intelligent Car)是电子计算机等最新科技成果与现代汽车工业相结合的产物,因而“善解人意”。通常具有自动驾驶,自动变速,甚至具有自动识别道路的功能。另外,车内的各种辅助设施也一应电脑化,常常给人以新奇感。
(smart car)飞思卡尔杯全国大学生智能汽车竞赛[1] 对智能汽车的简称
全国大学生“恩智浦”杯智能汽车竞赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以单片机为核心的大学生课外科技竞赛。组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,最快跑完全程而没有冲出跑道并且技术报告评分较高为获胜者。其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识。2015年恩智浦半导体收购飞思卡尔,比赛同时改名恩智浦杯。
传统具体分为四个组别,但每年比赛都有创意组发挥。
电磁组要求竞赛车模需要能够通过自动识别赛道中心线位置处由通有100mA 交变电流的导线所产生的电磁场进行路径检测。除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。基于赛题的要求,电磁组利用电感检测赛道中央的电磁线发出的方波信号,经过信号放大和滤波,再对信号进行处理之后,沿着赛道进行寻迹的一种组别方式,其中主要是要学习模电数电,信号处理,滤波算法。电磁引导的智能车由于不受光线、温度、湿度的影响,具有很好的环境适应性,相对于光电或摄像头引导的智能车具有很大的优势。但是由于其相对单一的外部信息获取方法和相对简单的硬件结构设计仅仅可以满足自主循迹的要求,对于其控制律结构的设计和算法的完善与创新还有很多工作可以深入开展。
光电组要求参赛选手使用线阵CCD对赛道进行检测,该传感器是包含128 个光电二极管的线性阵列。每个光电二极管都有各自的积分电路,此电路统称为像素。每个像素在光电二极管的不同光能量冲击下产生不同的模拟电荷信号,该信号的大小与光强和积分时间成正比。在驱动时序的作用下,CCD 将模拟电荷信号串行位移输出,从而判断一条线上的赛道线道。由于线性CCD提取的赛道信息非常的少,只有一条线上的128个像素点,所以如何完成赛道提取就是一个难点。相对而言需要足够优秀的算法去识别出各个弯道和直道,对于信号的处理能力要求非常高。
摄像头组要求参赛选手使用摄像头对赛道进行检测。目前常用的摄像头按照输出格式分为黑白摄像头和灰度摄像头;按照摄像头输出信号类型本身类型分为数字摄像头和模拟摄像头。摄像头种类包括OV5116、OV7725、OV7620等芯片类型。摄像头组拥有最多的数据,所以如何高速的处理完图像,如何滤去噪点,如何从大面的图像数据中完成模式识别识别出赛道并且具有一定的环境适应性就是摄像头组要求最高的地方,也是初步踏入模式识别道路的门槛。
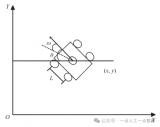
直立组为每年在三个基础赛题组上选择一组进行直立组的比赛,直立组要求使用二轮车模,通过算法进行车模的平衡,直立的核心传感器为加速度计陀螺仪,通过对输出信号进行滤波,然后加入程序中,了解当前姿态,进行姿态解算,然后对整车的平衡进行控制。其中涉及到卡尔曼滤波、互补滤波、自动控制原理等等多项专业知识,公认的智能车难度最大的组别,也是对自己能力和知识锻炼最大的一个组别。其观赏性和技术性无疑都是最为优秀的。

在智能车调试的过程中,由于电路板是自制的PCB电路板,存在着可靠性不高的问题。同时,在调试的过程中不可避免地出现人为的操作失误致使 BTS7960的输出...
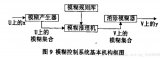
本文首先介绍了模糊控制算法的概念,其次介绍了模糊控制的工作原理,最后详细介绍了基于模糊控制算法的智能车转向舵机控制。
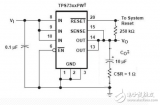
智能车电源:7.2V、2A/h的可充电鎳镉蓄电池。 1 输出电流限制在1A左右,TPS7350在100mA时只有35mV压差。 2 保证TPS3750输...
众所周知,压电式压力传感器的性能主要用瞬变压力信号发生器和正弦信号发生器测量。瞬变压力信号发生器是指产生阶跃波或其他非周期信号的压力发生器,目前,主要用...
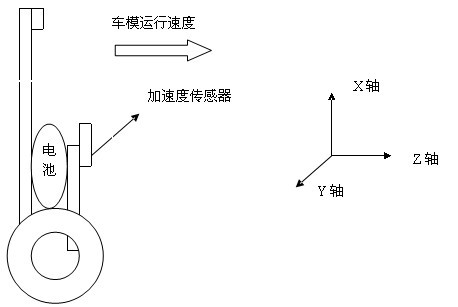
三轴加速度传感器MMA7260Q可以测量智能车惯性大小,选取最佳重心位置,并能准确定位智能车处于直线、弯道、坡道、漂移等运行状态;利用加速度传感器能够提...
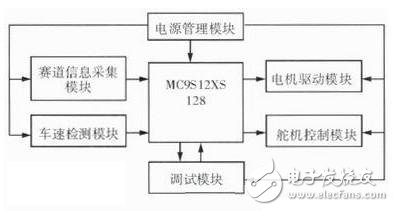
文中介绍一种基于电磁传感器路径识别的智能车控制系统,系统采用Freescale16位单片机MC9S12XS128为核心控制器,利用4个电磁传感器构成的传...
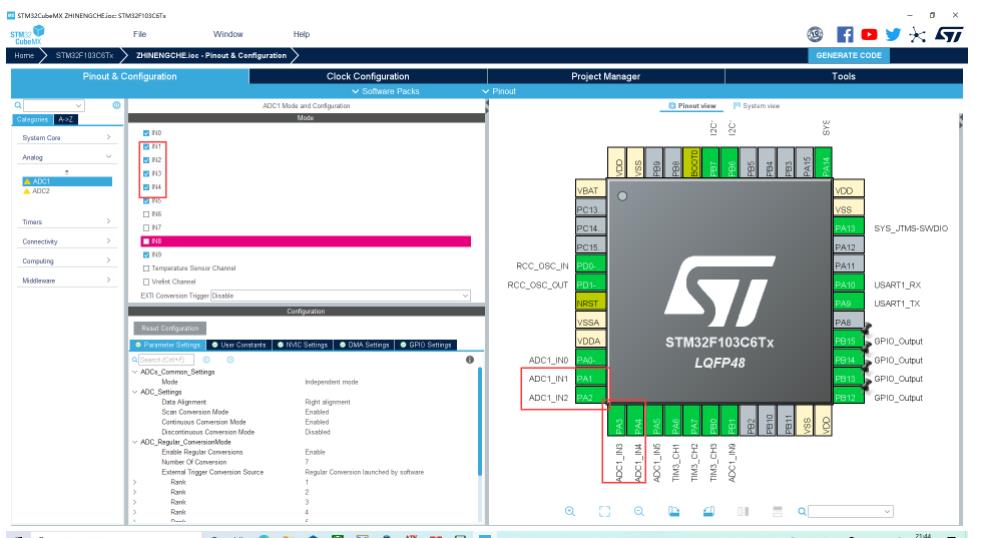
一.硬件部分 必需:STM32F103C6T6(或者STM32F103C8T6),舵机(MG 996R),电机(TT马达 130电机),L298n驱动,...
年轻热情的你是否也曾梦想过驾乘F1赛车体验速度的快感,渴求知识的你是否也曾梦想过亲手打造这样的模型体验科技的魅力,积极奋进的你是否也曾梦想过组建自己团队...
2018年6月26日至30日,第29届IEEE国际智能车大会(IEEE IV 2018)在常熟国际饭店隆重举办。作为IEEE IV 2018的重要组成部...
2.智能小车项目背景 所谓智能汽车,主要指在普通汽车的基础上增加了先进的传感器(雷达、摄像)、控制器、执行器等装置,通过车载传感系统和信息终端实现与人、...
值得注意的是更多中国创业公司的参与,尤其是中国的视觉独角兽——旷视、商汤和依图,都是首次出现,都出现在了十分显眼的地方(旷视和商汤是钻石赞助,依图是铂金...
IEEE IV 2018大会,智能车的介绍和“平行驾驶”的资料详细介绍
为期5天的IEEE IV 2018大会,汇集了来自世界各地逾千名专家学者前来进行学术交流,探讨智能车发展。作为本届大会的重要组成部分,IEEE IV 2...

本设计由STC89C52单片机电路+蓝牙模块电路+L298N电机驱动电路+DS18B20温度检测电路+风扇控制电路+红外避障传感器模块电路+电池盒电路组成。

在我国,复杂的混合交通所指的是机动车、非机动车、行人组成的混合交通,这种混合交通引发的交通拥堵、交通事故增加、城市环境不断恶化、运输效益下降等一系列问题...
由IEEE智能交通系统协会主办,中国自动化学会、常熟市人民政府、中国科学院自动化研究所、西安交通大学人工智能与机器人研究所等机构承办的第29届IEEE国...
在车载电子领域,大多数初创公司都是选择从难度比较小的后装市场开始切入。车萝卜在决定研发HUD时也是从后装做起的,它的第一代和第二代HUD都属于后装产品,...

本文主要设计的是一辆自主识别道路的智能车。整个系统采用了16位单片机mc9s12dg128,模型车本身带有差速器和后轮驱动,需要设计完成基于单片机的自动...
蓝宙电子前身是一个综合型社团-蓝宙科技小组,经过十几年的努力,蓝宙成为了飞思卡尔和ARM大学计划的合作伙伴。究竟蓝宙是依靠什么成长起来的?在第84届中国...
值得期待的是,目前各方力量正在联合布局,为推动物联网产业应用落地赋能。如各位所知,国家先后出台多项相关政策引导,每年持续投入大量资金来补齐交通基础设施短...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1