完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 机械手臂

机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
类型
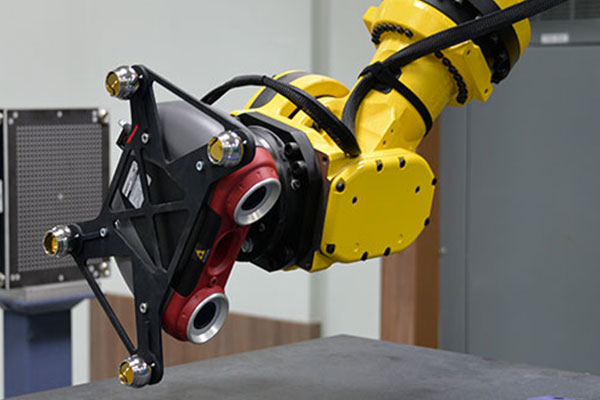
机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。右图为常见的六自由度机械手臂。他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
类型
机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。右图为常见的六自由度机械手臂。他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。
结构形式
水平多关节机械手臂一般有三个主自由度,Z1转动,Z2转动,Z移动。通过在执行终端加装X转动,Y转动可以到达空间内的任何坐标点。直角坐标系机械手臂有三个主自由度。X移动,Y移动,Z移动组成,通过在执行终端加装X转动,Y转动,Z转动可以到达空间内的任何坐标点。右图即为常见的构造形式之一,对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。直角坐标系机械手臂可以由单轴机械手臂组合而成。单轴机械手臂作为一个组件在工业中应用广泛。下图为单轴机械手臂。单轴机械手臂的组件化大大降低了工业设计的成本,因专业制造商拥有良好的质量保证和批量生产的优势,使用组件比自行设计机械手臂更具优势。常见的直交机械手组合有悬臂式,龙门式,直立式,横立式等样式。 对于半导体制造应用来说,常用的机械手臂是用来搬送晶片,比如下图双臂型的机械手
作用组成
作用手臂一般有3个运动:伸缩、旋转和升降。实现旋转、升降运动是由横臂和产柱去完成。手臂的基本作用是将手爪移动到所需位置和承受爪抓取工件的最大重量,以及手臂本身的重量等。
组成手臂由以下几部分组成:(1)运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。(2)导向装置。是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。(3)手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。
设计要求
1、手臂应承载能力大、刚性好、自重轻手臂的刚性直接影响到手臂抓取工件时动作的平稳性、运动的速度和定位精度。如刚性差则会引起手臂在垂直平面内的弯曲变形和水平面内侧向扭转变形,手臂就要产生振动,或动作时工件卡死无法工作。为此,手臂一般都采用刚性较好的导向杆来加大手臂的刚度,各支承、连接件的刚性也要有一定的要求,以保证能承受所需要的驱动力。2、手臂的运动速度要适当,惯性要小机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。手臂由静止状态达到正常的运动速度为启动,由常速减到停止不动为制动,速度的变化过程为速度特性曲线。手臂自重轻,其启动和停止的平稳性就好。3、手臂动作要灵活手臂的结构要紧凑小巧,才能做手臂运动轻快、灵活。在运动臂上加装滚动轴承或采用滚珠导轨也能使手臂运动轻快、平稳。此外,对了悬臂式的机械手,还要考虑零件在手臂上布置,就是要计算手臂移动零件时的重量对回转、升降、支撑中心的偏重力矩。偏重力矩对手臂运动很不利,偏重力矩过大,会引起手臂的振动,在升降时还会发生一种沉头现象,还会影响运动的灵活性,严重时手臂与立柱会卡死。所以在设计手臂时要尽量使手臂重心通过回转中心,或离回转中心要尽量接近,以减少偏力矩。对于双臂同时操作的机械手,则应使两臂的布置尽量对称于中心,以达到平衡。4、位置精度高机械手要获得较高的位置精度,除采用先进的控制方法外,在结构上还注意以下几个问题:(1)机械手的刚度、偏重力矩、惯性力及缓冲效果都直接影响手臂的位置精度。(2)加设定位装置和行程检测机构。(3)合理选择机械手的坐标形式。直角坐标式机械手的位置精度较高,其结构和运动都比较简单、误差也小。而回转运动产生的误差是放大时的尺寸误差,当转角位置一定时,手臂伸出越长,其误差越大;关节式机械手因其结构复杂,手端的定位由各部关节相互转角来确定,其误差是积累误差,因而精度较差,其位置精度也更难保证。5、通用性强,能适应多种作业;工艺性好,便于维修调整以上这几项要求,有时往往相互矛盾,刚性好、载重大,结构往往粗大、导向杆也多,增加手臂自重;转动惯量增加,冲击力就大,位置精度就低。因此,在设计手臂时,须根据机械手抓取重量、自由度数、工作范围、运动速度及机械手的整体布局和工作条件等各种因素综合考虑,以达到动作准确、可靠、灵活、结构紧凑、刚度大、自重小,从而保证一定的位置精度和适应快速动作。此外,对于热加工的机械手,还要考虑热辐射,手臂要较长,以远离热源,并须装有冷却装置。对于粉尘作业的机械手还要添装防尘设施。
工程应用
大脑控制手臂该机械臂由用户的头脑完全控制,灵巧到足以拿起一个玻璃杯,在没有其他人帮助的情况下喝掉一杯饮料。这个机械臂的创造者一个研究小组,成员来自于加州理工学院等机构,其中,神经芯片被植入Sorto的大脑后顶叶皮层(PPC)。该机器臂控制芯片植入位置与之前其他瘫痪用户控制机械臂的植入位置不同,通常情况下,这种控制芯片植入位置是控制肌肉的大脑区域,而PPC是控制我们行动意图的区域,移动,并让Erik Sorto控制的机械臂更加流畅和自然地运动。Erik Sorto要做的就是思考他打算做什么,并通过大量的练习,能够使机械臂进行他正在考虑的任务。[2]
橡胶机器手臂科学家已经研制出了橡胶机器手臂,可以抓起蚂蚁而不是捏死。目前这种机械手臂还处于研发阶段,科学家把电线浸入液体硅橡胶中,待凝固后抽出电线,得到一个长5-8mm,头发丝细的触手。触手内部分为许多小格子,通过压缩空气流动来做出各种动作,可以毫无伤害的握起蚂蚁的腰部。科学家认为这种触手将来会大有用武之地,当然不是抓蚂蚁玩儿,而是进行诸如精密的心脏及胚胎血管手术。
人的手臂相当于几轴的机械手
人的手臂可以拆分来看,主要有以下几个关节:肩关节、肘关节、腕关节、手指(不细分)。
人身体上的每一个关节,都可以抽象为机械上常说的连接副(运动副)。连接副可以细分为很多种,百度百科上有说明:运动副_百度百科也可以参考这个页面运动副及其分类。涉及到人体的关节,大概只需要了解转动副。毕竟我们肉身不能发生相对分离(滑移)。
转动副可以分为面内和空间两种: 1、面内转动副只有一个自由度(比如电机的旋转轴或者门轴,只能有一个转动,正反转属于一个自由度,而不是两个。)

2、空间转动副有三个自由度(比如常见的球铰,老式的电视机天线就是使用球铰来实现空间各个姿态位置的转动,但是其实只用到了两个方向的自由度)

上面说了那么多,无非就是想要说明连接的自由度。下面言归正传来数一下我们的手臂有几个自由度:
肩关节:其实肩关节有三个转动自由度,只不过每个方向的运动幅度收到限制且不一致。可以参考以下的X片,真的是球铰链接。

肘关节:肘关节其实只有两个自由度,因为结构上其实限制了一个转动自由度。因为肘关节不像肩关节一样是一个球铰,肘关节其实可以看成两个并联的球铰。

腕关节:两个自由度。将手掌平放在桌面上,我们其实是可以在平面内转动,也可以垂直于桌面上下转动的。手腕上关节特别多,用红线标出。

这样一来,仅仅是肩关节+肘关节+腕关节,我们手臂已经有了7个自由度了。
再说手指,其实将每个关节只算做一个自由度(部分手指关节有两个自由度),我们人类的手臂其实已经远远超过了空间上的六个自由度了。那为什么工业上常见的机械臂只有六个自由度呢?
这是因为工业上实现每一个自由度都需要有基本的运动副结构构造和驱动器件,再加上控制逻辑和算法,每次增加一个自由度往往是增加了几倍的难度与成本。而我们实际的三维空间有六个自由度就能够达到三维空间的任何一个点(工作范围内)了。

那么,增加自由度有什么意义呢(人手)?当然很有意义。比如我们手捧一杯水的时候,我们可以在保持水杯不倾倒的同时,可以调整肘关节的高度和姿态,毕竟你还可以可以在肘关节上放一个盘子的嘛。

机械手工作原理是什么?怎样控制机械手的运动的
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机 械手设计的关 键参数。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。
控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。

作为精密传动元件的一种,旋转花键在工作过程中承受了较大的负荷。在自动化设备上运用广泛,如:水平多关节机械手臂(SCARA)、产业用机器人、自动装载机、雷...

旋转花键是在花键外筒的外径上装上专用的轴承外套,使之运转动作,适用于水平多关节机械手臂(SCARA)、产业用机器人、自动装载机、镭射加工机、搬送装置、机...
超声波传感器是一种基于超声波的无接触式测距传感器,可以广泛应用于工业、医疗、军事等领域。本文将详细介绍超声波传感器的工作原理以及其在各个领域的应用。 超...
2.0T四缸汽油发动机是捷豹路虎在2016年9月发布的第二款Ingenium系列产品,是目前捷豹路虎最新研发的发动机,在动力大幅度提升的同时油耗及二氧化...
人手感觉一个表面的粗糙度和形状的最常用探索过程就是横向扫描。研发团队利用自己的机器人手臂引导机械手在固定高度对多个表面进行横向扫描,以区分其形状和纹理。...
机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下...

Sketch-RNN 模型得到了人们的广泛关注,一些开发者还基于该模型开发了一些有趣的应用。其中一个在线应用叫做 “Draw Together with...
机械臂是一种机械装置,可以是自动的也可以是人为控制的;工业机器人是一种自动化设备,机械臂是工业机器人的一种,工业机器人也有其它形式。 所以虽然两者含义不...
人类在执行某种物理行为时,大脑特定区域会产生特殊的脑电波,而不同的行为产生的脑电波也是有差异的。Nichio和Penaloza就是抓住了这点,通过开发算...
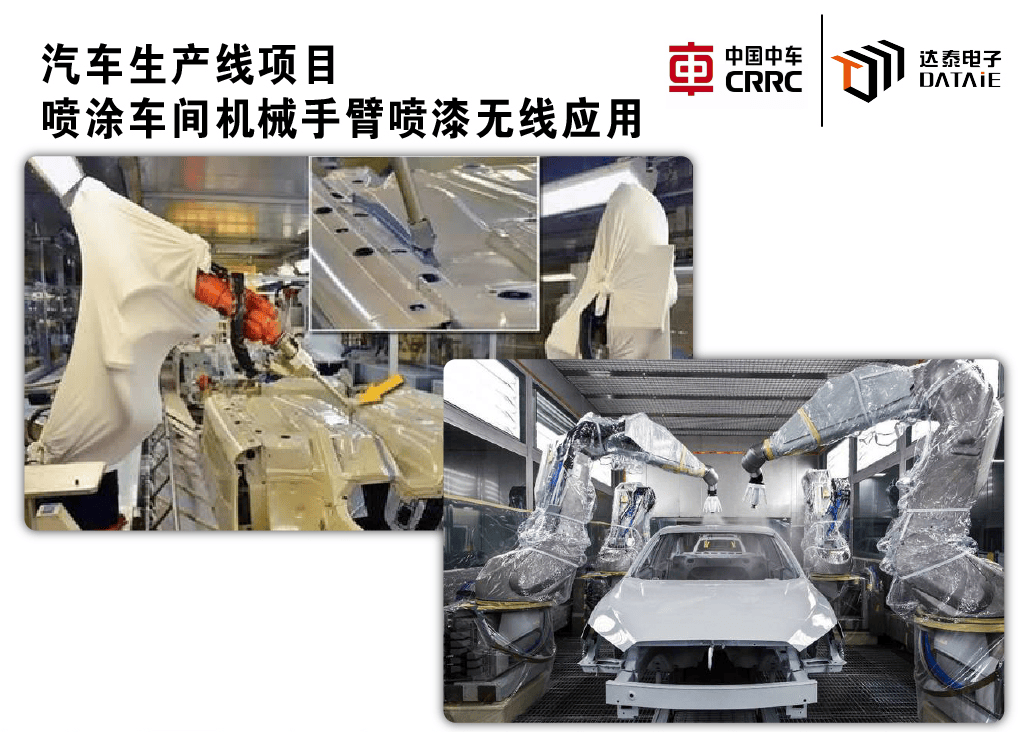
一、项目背景 在汽车生产装配工艺中,机械臂目前已经广泛地应用于装配、搬运等工业生产中,在机械臂系列产品中,汽车喷漆自动控制喷涂机械装置以其独特的优势,能...
Hello Robot宣布推出轻量级、功能强大的家用机械手臂Stretch 3
在过去的一年里,机器人领域发生了很多事情。每个人都在想象人工智能将如何改变机器人,以及类人机器人是否会毁掉它等等。

夹爪的应用是机器人、机械手臂末端执行器,其稳定、高效、精准、科技化的特点,有效提高了各行各业生产效率,解决工业化精密运动控制的难题。电动夹爪通过电机、传...
3D视觉技术通过3D相机和传感器,可以准确地捕捉和分析货物的三维形状、尺寸和体积等信息,从而精确地将其分配到正确的位置,大大提高了分拣的速度和准确性。
无锡金红鹰工业自动化有限公司(www.jhyrobot.com)是一家设计生产工业机器人及提供机器人工业自动化系统解决方案的高新技术企业。如果您对焊接机...
机械手臂因为要长时间高强度作业,所以对于滑环的可靠性有极高的要求,而3D扫描仪具备高清超高清图片或视频的快速拍摄能力,其滑环应具备高速率视像数据的传输能力。
机器人可以做什么?在餐厅做服务员上菜,亦或是扫地?这些简单的操作机器人可以轻易实现。但让机器人开门、拧瓶盖这类精细复杂的动作,他们可以做到吗?
其中,脑机接口作为脑科学的应用区,近年来备受政府、科研院所、企业、投资机构等主体的青睐。目前,全球多家机构对脑机接口的市场前景持乐观态度。微脑科技便是专...
服务机器人研发生产呈现上升趋势。南京蔚蓝智能科技有限公司研发的阿尔法机器狗系列产品,可以行走、爬升、奔跑、跳跃,能够收拾餐桌,把餐食垃圾清除之后将所有餐...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1