完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 检测算法
在计算机视觉领域,最基本也最经典的一个问题就是目标识别给出一张图像,用detector检测出图像中特定的object(如人脸)。检测算法的基本原理就是先通过训练集学习一个分类器,然后在测试图像中以不同scale的窗口滑动扫描整个图像;
文章:29个 浏览:25228次 帖子:4个
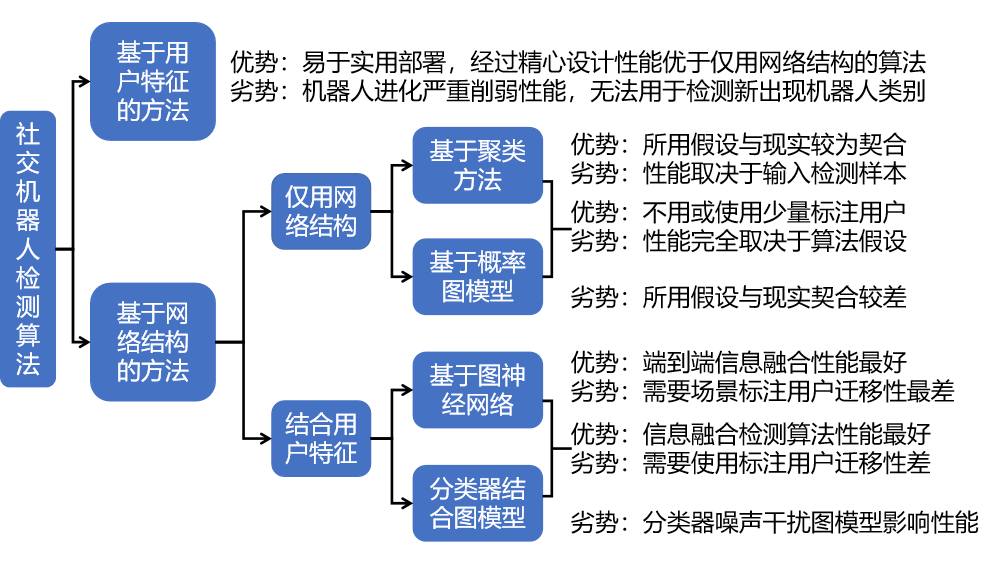
在线社交网络面临着网络社交机器人操控的威胁,而现有的检测算法还不能缓解这种威胁。如何有效利用人工智能技术检测社交机器人,规避其潜在的风险并保障网络的良好...
现有的FPC缺陷检测算法多衍生于PCB检测算法,但受本身独特性限制,FPC板缺陷要求更高,检测样板尺寸更大,样板成像易变形,使得针对PCB板的缺陷检测算...

大家或许知道,首字母缩写YOLO在英文语境下较为流行的含义,即You Only Live Once,你只能活一次。我们今天要介绍的YOLO却有着与前者不...
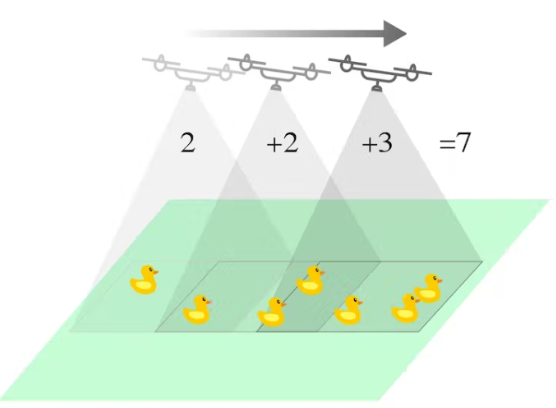
目标边界点的选择是有效探索的关键。以边界为基础的战略是由Yamauchi首先提出的。所使用的探索策略是识别当前地图中的所有边界区域,然后驱动机器人前往最...

NO 1. AOI 测试作用 AOI(Automated Optical Inspection)的全称是自动光学检测,在生产过程中,对电池片的外观缺陷和...
运动目标检测的主要目的是从图片序列中将变化区域或者运动物体从背景图像中分离出来,常用于视频监控、异常检测、三维重建、实时定位与建图等领域。运动目标检测是...
目前,日志异常检测算法采用基于时间序列的方法检测异常,具体为:日志结构化 -> 日志模式识别 -> 时间序列转换 -> 异常检测。异常...
摘 要:为了提高移动采摘机器人在复杂野外环境下检测油茶果的速度和鲁棒性,在 YOLOv4⁃tiny 网络的基础上提出YOLO⁃Oleifera 网络。...
本项目使用 Edge Impulse 的 FOMO(Faster Objects, More Objects)物体检测算法。野生动物/牲畜/资产跟踪环境...
根据设定的目标区域特点,如长宽、长宽比等,来判断该区域是否满足要求,如果满足,则放到rectlist中。然后将该list中的所有点都置黑。转到(1)执行。
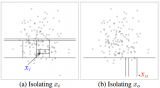
xi样本点的isolation需要大概12次划分,而异常点x0指需要4次左右。因此,我们可以根据划分次数来区分是否为异常点。但是,如何建模呢?我们容易想...
Hough变换是目前应用最广泛的圆检测方法,该方法可靠性高,在噪声、变形、甚至部分区域丢失的状态下仍然能取得理想效果。但其缺点是计算复杂,内存需求大。算...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1