完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 焊钳
文章:16个 浏览:1388次 帖子:0个
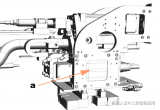
C-50 焊钳上的变压器 C-8000 焊钳上的变压器 第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。 第 2 步:将带焊钳的机器...

可以通过目录管理单独添加SGB选件包中未包括的目录元素。 必须添加目录元素“ VW_SGB”。 通过文件插入合适的钳子→目录管理 通过拖放将钳子电机...

KUKAC4机器人焊钳拉拽程序分析sg_fehler ()w
GLOBALINTERRUPTDECL 8 WHEN $softplcbool[5] DO SZIntR(7)中断程序激活滞后故障,$softplcbo...
焊钳的压力比例为4.0左右,即主气缸输出4000N左右压力,能使电极帽压力达到1000N左右.这个比例值过大,使得在使用大的焊接压力值时,MPYE产生的...

在此计时器中,EA已经为项目中配置的第一个计时器预设,不再需要调整。如果在一个项目中实施了多个计时器,则必须手动调整EA区域。
如果两根电极臂都必须更换,我们建议您首先更换与旧电极臂对齐的电极臂,然后再更换第二根电极臂。第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。
在对齐固定式电极臂后必须注意要重新计算 TCP 点。在对齐前要注意焊钳随附资料中的报告和图纸。第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。
2: SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnummer=5154 FahrzeugTyp= ...
第 3 步:将带焊钳的机器人移至一个安全的维护位置。或者分离机器人焊钳与机器人,并将机器人焊钳定位至适合进行维护工作的基架上。
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

