完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 角度传感器

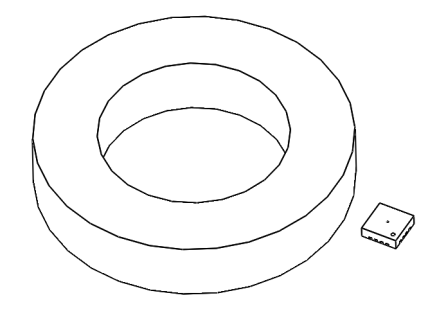
角度传感器,顾名思义,是用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。
角度传感器,顾名思义,是用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。
概述
你可以很容易的测出位置和速度。当在机器人身上连接上轮子(或通过齿轮传动来移动机器人)时,可以依据旋转的角度和轮子圆周数来推断机器人移动的距离。然后就可以把距离转换成速度,你也可以用它除以所用时间。实际上,计算距离的基本方程式为:距离=速度×时间
由此可以得到:速度=距离/时间
角度传感器,顾名思义,是用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。
概述
你可以很容易的测出位置和速度。当在机器人身上连接上轮子(或通过齿轮传动来移动机器人)时,可以依据旋转的角度和轮子圆周数来推断机器人移动的距离。然后就可以把距离转换成速度,你也可以用它除以所用时间。实际上,计算距离的基本方程式为:距离=速度×时间
由此可以得到:速度=距离/时间
举例
如果把角度传感器连接到马达和轮子之间的任何一根传动轴上,必须将正确的传动比算入所读的数据。举一个有关计算的例子。在你的机器人身上,马达以3:1的传动比与主轮连接。角度传感器直接连接在马达上。所以它与主动轮的传动比也是3:1。也就是说,角度传感器转三周,主动轮转一周。角度传感器每旋转一周计16个单位,所以16*3=48个增量相当于主动轮旋转一周。我们需要知道齿轮的圆周来计算行进距离。幸运地是,每一个LEGO齿轮的轮胎上面都会标有自身的直径。我们选择了体积最大的有轴的轮子,直径是81.6CM(乐高使用的是公制单位),因此它的周长是81.6×π=81.6×3.14≈256.22CM。已知量都有了:齿轮的运行距离由48除角度所记录的增量然后再乘以256。我们总结一下。称R为角度传感器的分辨率(每旋转一周计数值),G是角度传感器和齿轮之间的传动比率。我们定义I为轮子旋转一周角度传感器的增量。即:I=G×R
在例子中,G为3,对于乐高角度传感器来说,R一直为16.因此,我们可以得到:I=3×16=48
每旋转一次,齿轮所经过的距离正是它的周长C,应用这个方程式,利用其直径,你可以得出这个结论。C=D×π
在我们的例子中:C=81.6×3.14=256.22
最后一步是将传感器所记录的数据-S转换成轮子运动的距离-T,使用下面等式:T=S×C/I
如果光电传感器读取的数值为296,你可以计算出相应的距离:T=296×256.22/48=1580 距离(T)的单位与轮子直径单位是相同的。
无接触角度传感器无触点角度传感器,又称无接触电位器,广泛应用于工业自动化设备、工程机械、纺织机械、造纸印刷机械、石化设备、国防工业等自动控制设备的水平和旋转角度的测量,也适用于拉丝机等作张力传感器。
方位角度传感器
方位角又称地平经度,是在平面上量度物体之间的角度差的方法之一。传感器测量方位角是从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,是一种两面角,即午圈所在的平面与通过天体所在的地平经圈平面的夹角,以午圈所在的平面为起始面,按顺时针方向度量。方位的度量亦可在地平圈上进行,以南点为起算点,由南点开始按顺时针方向计量。方位的大小变化范围为0°~360°,南点为0°,西点为90°,北点为180°,东点为270°。上述这种方位度量是在天文学中所用的方法。
方位角传感器在跟随着军事技术的发展,有着高科技作战的性能。传感器测试系统的信息化是实现中国军队装备现代化建设主要途径,当务之急应该用高新技术提升老装备的性能。这既是提升现有武器装备的一个重要环节,又是最大限度地发挥现有装备整体作战效能的一个重要因素。我国现役的炮塔方位角系统中.老型号较多,大部分没有配备自动检测和录取设备。炮塔方位角系统的各种参数的计算、数据的处理和上报大多数由人工进行,难以胜任复杂环境下快速、准确采集。为适应现代化炮塔方位角系统的要求,必须具有一套自动采集和分析能力的完整测试系统。
应用
在程序不仅仅会用到乘法和除法的数学运算,还有更多的需要多留心(有关内容我们将在第12章进行进一步的讨论)。
使用角度传感器来控制你的轮子可以间接的发现障碍物。原理非常简单:如果马达运转,而齿轮不转,说明你的机器已经被障碍物给挡住了。此技术使用起来非常简单,而且非常有效;唯一要求就是运动的轮子不能在地板上打滑(或者说打滑次数太多),否则你将无法检测到障碍物。如果是一个空转的齿轮连接到马达上就可以避免这个问题,这个轮子不是由马达驱动而是通过装置的运动带动它:在驱动轮旋转的过程中,如果惰轮停止了,说明你碰到障碍物了。
在许多情况下角度传感器是非常有用的:控制手臂,头部和其它可移动部位的位置。值的注意的是,当运行速度太慢或太快时,RCX在精确的检测和计数方面会受到影响。事实上,问题并不是出在RCX身上,而是它的操作系统,如果速度超出了其指定范围,RCX就会丢失一些数据。Steve Baker用实验证明过,转速在每分钟50到300转之间是一个比较合适的范围,在此之内不会有数据丢失的问题。然而,在低于12rpm或超过1400rpm的范围内,就会有部分数据出现丢失的问题。而在12rpm至50rpm或者300rpm至1400rpm的范围内时,RCX也偶会出现数据丢失的问题。
角度传感器在军事上的应用
大家熟知的火炮是利用火药燃气压力等能源抛射弹丸,口径等于和大于20毫米的身管射击武器。火炮通常由炮身和炮架两大部分组成。早在1332年,中国的元朝就在部队中装备了最早的金属身管火炮:青铜火铳。火炮通常由炮身和炮架两大部分组成。火炮射击时对炮床倾角的要求很高,利用角度传感器设计的数字式象限仪,可明显提高校正炮床的速度,降低操作难度。
角度传感器是作为炮弹发射的准确性,稳定性提供最大的帮助。大家都知道火炮身管用来赋予弹丸初速和飞行方向,炮尾用来装填炮弹,炮闩用以关闭炮膛,击发炮弹。如今炮架由反后坐装置、方向机、高低机、瞄准装置、大架和运动体,角度传感器等组成,而反后坐装置用以保证火炮发射炮弹后的复位,方向机和高低机用来保证火炮发射炮弹后复位,方向机和高低机用来操纵炮身变换方向和高低,瞄准装置由角度传感器,瞄准具和瞄准镜组成,用以装定火炮射击数据,实施瞄准射击,大架和运动体用于射击时支撑火炮,行军时作为炮车。
应用场合:
系列倾角,角度传感器,距离传感器,加速度传感器,以及测量方位用的数字罗盘,电子罗盘和陀螺仪已经广泛的应用应用于石油,煤炭,钢铁,船舶,隧道,医疗设备,大坝,机械,物探仪器,地质,岩土,石油,矿山,管道,测斜导管,铁路、港口、水利、高层建筑,墙洞,矿井、隧道、船坞、抗滑桩和板桩,煤矿,动态冲击实验,地质,卫星GPS系统,风水,越野车,航海,实验仪器,数字水平仪,医疗,机械调平,角度测量和监视,汽车,起重机械运动检测,康复系统,生物工程系统,虚拟现实、现实放大,体育,惯性导航系统,人体姿态测量工业机械,摩托车陀螺仪,光纤,制导,平衡,导向,方向测量,动态跟踪,捷联,惯性,导航,方位角,角速度,速率,机械,爆转,测量等行业。
典型应用场合:
- 地理: 山体滑坡,雪崩。
- 民用: 大坝,建筑,桥梁,玩具,报警,运输
- 工业:吊车,吊架,收割机,起重机,称重系统的倾斜补偿,沥青机.铺路机等。
- 火车:高速列车转向架和客车车厢的倾斜测量
- 海事:纵倾和横滚控制,油轮控制,天线位置控制。
- 钻井:精确钻井倾斜控制。
- 机械:倾斜控制,大型机械对准控制,弯曲控制,起重机
- 军用:火炮和雷达调整,初始位置控制,导航系统,军用着陆平台控制。
角度传感器原理
一旦我们将角度传感器连接在机器人上时,我们便可以轻松根据角度传感器检测到的角度来计算其移动的距离(距离=角度*轮子周长/2π),在得知其行走时间的前提下也可以计算出其平均速度(速度=距离/时间)。
一旦我们把角度传感器连接在机器人马达与轮子之间的任何一根传动轴上时,假设马达与主轮连接的传动比为3:1,则角度传感器与主轮的传动比也为3:1,即角度传感器计数16*3=48次时,主轮转一圈,假设角度传感器计数x次,则主轮旋转角度为2π*x/48,机器人行走距离为齿轮圆周长*x/48,便也可以根据其时间计算其平均行走速度了。角度传感器在日益发展的机器人领域真可谓是发挥了他巨大的作用呀~~

三、应用
在军事领域,角度传感器也大大提高了炮弹发射的准确性和稳定性,如今的炮架主要由反后坐装置、方向机、高低机、瞄准装置、大架、运动体等构成,其中,方向机和高低机主要用于操纵炮身的方向和高低;瞄准装置由角度传感器、瞄准具和瞄准镜构成,主要用于对目标进行精确的定位(请自行脑补如果没有角度传感器,仅仅依靠人力对方向机和高低机进行调节来定位目标的画面,pong一声,尘土飞扬,可是。。。并没有打到目标。。。笑哭~)
除提高炮弹发射准确率外,角度传感器在钻井倾斜控制的精确度、称重系统的倾斜补偿、天线位置控制、军用着陆平台控制等多方面都有着极其重要的应用,尤其是在机器人日益发展的今天,角度传感器又将大显身手。

选择角度传感器的四个方法
角度传感器,在实际操作中应用是比较广泛的,能够适用不同行业不同领域各种环境的需要。但为了在测量过程中减小误差的出现,就需要在选择质量好的角度传感器。特别是对于新手而言,该怎么样判断角度传感器的好坏呢?
1、灵敏度的选择通常,在角度传感器的线性范围内,希望角度传感器的灵敏度越高越好。因为只有灵敏度高时,与被测量变化对应的输出信号的值才比较大,有利于信号处理。但要注意的是,传感器的灵敏度高,与被测量无关的外界噪声也容易混入,也会被放大系统放大,影响测量精度。因此,要求传感器本身应具有较高的信噪比,尽员减少从外界引入的厂扰信号。传感器的灵敏度是有方向性的。当被测量是单向量,而且对其方向性要求较高,则应选择其它方向灵敏度小的传感器;如果被测量是多维向量,则要求传感器的交叉灵敏度越小越好。
2、频率响应特性角度传感器的频率响应特性决定了被测量的频率范围,必须在允许频率范围内保持不失真的测量条件,实际上传感器的响应总有—定延迟,希望延迟时间越短越好。传感器的频率响应高,可测的信号频率范围就宽,而由于受到结构特性的影响,机械系统的惯性较大,因有频率低的传感器可测信号的频率较低。在动态测量中,应根据信号的特点(稳态、瞬态、随机等)响应特性,以免产生过火的误差。
3、线性范围角度传感器的线形范围是指输出与输入成正比的范围。以理论上讲,在此范围内,灵敏度保持定值。传感器的线性范围越宽,则其量程越大,并且能保证一定的测量精度。在选择传感器时,当传感器的种类确定以后首先要看其量程是否满足要求。但实际上,任何传感器都不能保证绝对的线性,其线性度也是相对的。当所要求测量精度比较低时,在一定的范围内,可将非线性误差较小的传感器近似看作线性的,这会给测量带来极大的方便。
4、稳定性传感器使用一段时间后,其性能保持不变化的能力称为稳定性。影响传感器长期稳定性的因素除传感器本身结构外,主要是传感器的使用环境。因此,要使传感器具有良好的稳定性,传感器必须要有较强的环境适应能力。另外,在选择角度传感器之前,应对其使用环境进行调查,并根据具体的使用环境选择合适的传感器,或采取适当的措施,减小环境的影响。

TMR(Tunneling Magneto Resistance,隧道磁电阻)角度传感器与磁阻传感器在磁性测量领域都扮演着重要角色,但它们在原理、结构、...
TMR(Tunneling Magneto Resistance,隧道磁电阻)角度传感器是一种基于隧道磁电阻效应的高精度传感器,广泛应用于工业控制、汽车...
在需要使用矢量控制FOC算法的车载电机系统中,高精度TMR角度传感器芯片一直在与霍尔角度芯片、旋变方案、电涡流芯片等其它方案竞争电机转子位置检测(RPS...
方向角度传感器是一种用于测量物体相对于某个参考方向的角度的传感器,广泛应用于航空、航天、航海、机器人、无人驾驶等领域。当方向角度传感器出现故障时,可能会...
方向角度传感器是一种用于测量物体方向和角度变化的传感器,广泛应用于航空、航天、航海、机器人、汽车、无人机等领域。当方向角度传感器出现故障时,会对相关设备...
方向角度传感器是一种用于测量物体相对于某个参考方向的角度变化的传感器。它广泛应用于航空航天、机器人、汽车、船舶、导航等领域。在这些应用中,方向角度传感器...
芯品# 集成匝数计数器的汽车级高精度模拟 AMR 角度传感器
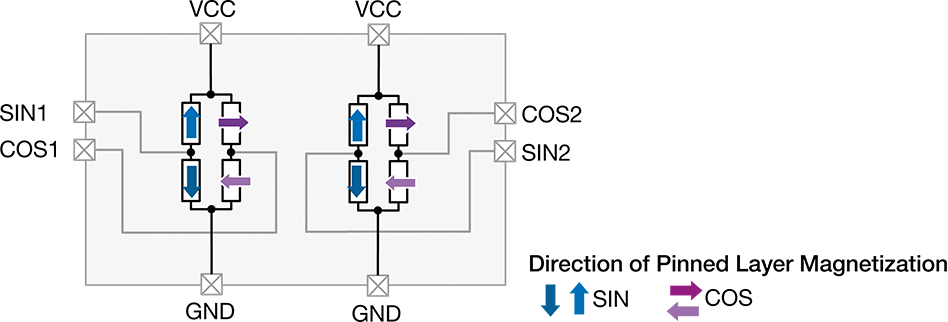
TMAG6181-Q1 是一款基于各向异性磁阻 (AMR) 技术的高精度角度传感器。该器件集成信号调节放大器,并提供与所施加平面磁场的方向相关的差分正弦...

传感器,尤其是角度传感器,在需要满足功能安全标准的系统中不可或缺。它有助于监控和提供扭矩和角度信息,而这些信息是高效驱动或运行各种汽车系统所必需的。
传感器主要包括: 车轮速度传感器:监测各个车轮的转速; 转向传感器:监测方向盘的转向角度 横摆率传感器&横向加速度传感器:监测...
使用 MagAlpha 的侧形结构时, 用户需要考虑几个标准才能达到高度线性输出。 MagAlpha 角度传感器有一个内置线性选项( 称为“ BCT ”...

一款基于各向异性磁电阻(AMR)技术的角度传感器IC-AM100
磁阻角度传感芯片 - AM100是一款基于各向异性磁电阻(AMR)技术的角度传感器IC。它产生一个模拟输出电压,该电压随通过传感器表面磁通量的方向而变化。
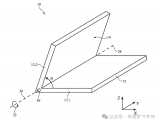
苹果获创新折叠屏角度传感器专利 或应用在折叠iPhone、iPad
根据美国商标和专利局(USPTO)公示的清单显示,苹果获得了一项与折叠屏技术相关的专利,苹果的 这项专利的名称为“带有光学角度传感器的电动设备”。这项专...
在全球瞩目的Sensors Converge 2024展会上,中国专业隧道磁阻(TMR)磁传感器制造商多维科技有限公司(MDT)宣布,其最新研发的两款超...
在全球功率系统和物联网领域占据领导地位的英飞凌科技股份公司,近日宣布推出了一款全新的角度传感器系列——XENSIV™ TLE49SR。这款传感器系列以其...
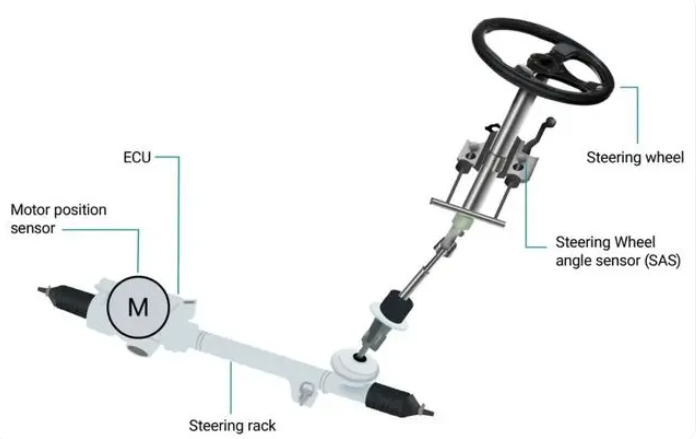
EPS 系统的优点包括运行更快且更智能、减少二氧化碳排放、提高燃油效率并增强用户体验。驾驶员在方向盘界面提供系统输入。传感器检测电机轴的位置和方向盘的旋...
安装和使用AWS角度传感器的注意事项 安装和使用AWS角度传感器是一项重要而复杂的任务。这些传感器通常用于监控和收集环境数据,如温度、湿度、气压等,以...
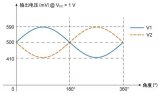
多维科技TMR3016角度传感器芯片在0°~360°角度范围内,输出一组正弦波形的差分模拟电压信号, 峰峰值电压约为360mV/V。

RVIT TYPE4150角度传感器用来检测角度的,它的身体中有一个孔,能够配合乐高的轴,当连接到RCX上时,轴每转过1/16圈,RVIT TYPE41...

角度测量是几何测量的重要组成部分。 角度量的范围很广。 平面角可分为水平面的水平角(或方位角)、垂直面的垂直角(或倾角),空间角是水平角和垂直角的合成;...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1