完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > RMS

任务按单调速率优先级分配(RMPA)的调度算法,称为单调速率调度(RMS)。RMPA是指任务的优先级按任务周期T来分配。它根据任务的执行周期的长短来决定调度优先级,那些具有小的执行周期的任务具有较高的优先级,周期长的任务优先级低。
任务按单调速率优先级分配(RMPA)的调度算法,称为单调速率调度(RMS)。RMPA是指任务的优先级按任务周期T来分配。它根据任务的执行周期的长短来决定调度优先级,那些具有小的执行周期的任务具有较高的优先级,周期长的任务优先级低。
任务按单调速率优先级分配(RMPA)的调度算法,称为单调速率调度(RMS)。RMPA是指任务的优先级按任务周期T来分配。它根据任务的执行周期的长短来决定调度优先级,那些具有小的执行周期的任务具有较高的优先级,周期长的任务优先级低。
RMS(Rate-Monotonic Scheduling)调度算法
简介不考虑n=1的情况。RMS是单处理器下的最优静态调度算法。1973年Liu和Layland发表的这篇文章的前半部分,首次提出了RM调度算法在静态调度中的最优性。它的一个特点是可通过对系统资源利用率的计算来进行任务可调度性分析,算法简单、有效,便于实现。不仅如此,他们还把系统的利用系数(utilization factor)和系统可调度性联系起来,推导出用RM调度所能达到的最小系统利用率公式。 同时,这篇论文中透露出来的证明思想和方法也被人们所效仿。下面就让我们来看看这篇文章中关于RM调度算法的重要结论。任何一个结论都有一个模型假设,让我们先列出这里的假设:(A1) 所有的任务请求都是周期性的,必须在限定的时限内完成;(A2) 任务的作业必须在该任务的下一个作业发生之前完成,这样避免了考虑队列问题; 在这里,我们对任务和作业不作特别的区分,因为一个任务请求就是一个作业。(A3) 任务之间都是独立的,每个任务的请求不依赖于其他任务请求的开始或完成;(A4) 每个任务的运行时间是不变的,这里任务的运行时间是指处理器在无中断情况下用于处理该任务的时间;(A5) 所有的非周期性任务都在特殊的情况下运行,比如系统初始化或系统非正常紧急处理程序。(A6) 其它一些假设,比如,单处理器,可抢占调度,任务切换的时间忽略不计等等。
RMS算法⑴ 任务T i (P i,Ci,D i) 模型: 周期为P i,计算时间为Ci,时限D i 为周期终点。任务在周期起点释放,高优先级任务可抢占低优先级任务的执行。⑵ 优先级分配方法: 静态固定分配。优先级与周期成反比,周期越短优先级越高。⑶ 可调度性分析: 如果任务集满足下式,则该任务集可调度。
定理1n个独立的周期任务可以被RMPA调度,如果U《=n(2^(1/n)-1)。一个任务的响应时间(response time)是指一个任务请求,这个任务实际完成的时间跨度。在静态调度中,任务的临界时刻(critical instant)这个概念被首先提出来,它被定义为一个特定的时刻,如果在这个时刻有这个任务的请求,那么这个任务就会需要最大的响应时间,由此得出定理1:一个任务的临界时间就是比这个任务优先级高的所有任务同时发出请求的时刻。证明: 由于一个任务的响应时间,是它自己的负载时间,加上被其它优先级高的任务所打断的时间。由于自己的负载时间是固定的,我们考虑在什么时候任一高优先级的任务会有最长的打断时间。显然,只有当这一高优先级的任务与该任务同时请求处理时,才能可能产生最大的打断时间。定理1的价值在于它找到了一个证明、一个调度算法,能否调度任一任务集充分必要条件,那就是所有任务同时请求执行的时的情况下,每个任务仍能满足各自的期限,那么这个任务集就可以被这个调度算法调度。有了这个推论,我们就可以证明RM调度的最优性了。
定理2如果一个任务集能够被静态调度,那么RMS算法就能够调度这个任务集。从这个意义上说,RMS是最优的静态调度算法。这个定理的证明方法就是有名的交换法。证明思路如下:假设一个任务集S采用其他静态优先级算法可以调度,那么总有这样两个优先级相邻的任务i和j,有Ti》Tj,而Pi≤Pj。把Ti和Tj的优先级Pi和Pj互换,明显可以看出这时S仍然可以调度,因为在所有任务同时请求的情况下,交换这两个任务不会影响其它任务的完成时间,同时这两个任务都可以在各自期限内完成,按照这样的方法,其他任何静态优先级调度最终都可以转换成RM调度。RMS已被证明是静态最优调度算法,开销小,灵活性好,是实时调度的基础性理论。即使系统瞬时过载,也完全可预测哪些任务丢失时限。缺点是处理机利用率较低,最坏的情况下,当n→∞时,不超过ln2(≈ 70%)。另外,RMS是充分但非必要条件。而在一般情况下,对于随机的任务集大约只有88%。70%或者88%的处理器利用率,对于许多实时应用来说是一个严重的限制,动态调度算法如最早截止期、最先(earliest deadlinefirst,EDF)或者最少空闲时间最先(least laxity first,LLF)已经被证明是最优的,并且能够实现100%的处理器利用率。
调度具有资源同步约束的RMS调度当实时任务间共享资源时,可能出现低优先级任务不可预测地阻塞高优先级任务执行的情况,叫优先级倒置。这时RMS 算法不能保证任务集的调度,必须使用有关协议控制优先级的倒置时间。常用的协议有优先级顶级协议和堆资源协议,使用这些协议可使优先级的倒置时间最多为一个资源临界段的执行时间,并且不会发生死锁。基于RMS 的非周期任务的调度实时系统中的非周期任务可采用延迟服务器算法或随机服务器算法进行调度。它们的最大特点是可在周期任务的实时调度环境下处理随机请求。两者的基本思想是将非周期任务转化成周期任务,再利用RMS算法进行调度。前者用一个或几个专用的周期任务执行所有非周期任务,这种周期任务叫非周期任务服务器。根据周期大小,服务器有固定优先级,服务器的执行时间被称为预算,它在每个服务器周期Ts的起点补充。只要服务器有充足的预算,就可在其周期内为非周期任务服务。该算法实现简单,但可调度性分析较难,有时会出现抖动,可能发生一个非周期任务在相邻两个服务器周期中连续执行2倍预算的现象,与RMS理论不符,需要适当修改RMS算法。随机服务器算法与延迟服务器算法相似,但预算不是在每个周期起点补充,而是在预算消耗Ts时间之后再补充。该算法与RMS分析算法一致,但实现复杂。人物如份额。
均方根RMS(Root Mean Square)就是均方根,实际就是有效值,是一组统计数据的平方和的平均值的平方根。RMS=sqrt[(x1^2+x2^2+.。。。。.+xn^2)/n]英语写为:Root Mean Square(RMS)。美国传统词典的定义为:The square root of the average of squares of a set of numbers.即:将N个项的平方和除以N后开平方的结果,即均方根的结果。均方根应用:在直流(DC)电路中,电压或电流的定义很简单,但在交流(AC)电路中,其定义就较为复杂,有多种定义方式。均方根(rms)指的是定义AC波的有效电压或电流的一种最普遍的数学方法。要得出rms值需要对表示AC波形的函数执行三个数学操作:⑴计算波形函数(一般是正弦波)的平方值。⑵对第一步得到的函数求时间平均值。⑶求第二步得到的函数的平方根。
有效值在一个阻抗由纯电阻组成的电路中,AC波的rms值通常称作有效值或DC等价值。比如,一个100V rms的AC源连接着一个电阻器,并且其电流产生50W热量,那么对于100V连接着这个电阻器的电源来说也将产生50W的热量。对正弦波来说,rms值是峰值的0.707倍,或者是峰-峰值的0.354倍。家用电压是以rms来表示的。所谓的“117V”的交流电,其峰值(pk)约为165V,峰-峰值(pk-pk)约为330V。RMS Voltage(有效电压)RMS Voltage(Root mean square value of alternating-current (ac) voltage):同Effective voltage。对于正弦曲线交流电压,U(RMS) = 0.707U(MAX)RMS Current(有效电流)RMS Current(Root mean square value of alternating-current (ac) current):同Effective current。对于正弦曲线交流电流,I(RMS) = 0.707I(MAX)
安全技术
Rights Management ServicesMicrosoft Windows Rights Management 服务 (RMS),是一种与应用程序协作来保护数字内容(不论其何去何从)的安全技术,专为那些需要保护敏感的 Web 内容、文档和电子邮件的用户而设计。用户可以严格规定哪些用户可以打开、读取、修改和重新分发特定内容。组织可以创建权限策略模板,以实施用户应用于内容的策略。
MIDP中
Record Management System是MIDP中一个非常重要的子系统。RMS是首先在MIDP1.0中提出的,它所在的包是javax.microedition.rms,在这个包里面总共包括四个接口、一个类和五个异常。
监控系统
Remote Monitoring System远程监控系统
黑客
Richard Matthew Stallman
简介(理查德·马修·斯托曼)理查德·马修·斯托曼理查德·马修·斯托曼(Richard Matthew Stallman,RMS,生于1953年),自由软件运动的精神领袖、GNU计划以及自由软件基金会(Free Software Foundation)的创立者、著名黑客。他最大的影响是为自由软件运动竖立了道德、政治以及法律框架。他被许多人誉为当今自由软件的斗士、伟大的理想主义者,但同时也有人批评他过于固执、观点落伍。斯托曼1953年出生于美国纽约曼哈顿地区,1971年进入哈佛大学学习,同年受聘于麻省理工学院人工智能实验室(AI Laboratory),成为一名职业黑客。在AI实验室工作期间,斯托曼开发了多种今后影响深远的软件,其中最著名的就是Emacs。斯托曼在AI是一名典型的黑客,是整个黑客文化的一分子。然而进入八十年代后,黑客社群在软件工业商业化的强大压力下日渐土崩瓦解,甚至连AI实验室的许多黑客也组成了Symbolic公司,试图以专利软件来取代实验室中黑客文化的产物--免费可自由流通的软件。斯托曼对此感到气愤与无奈。在对Symbolic进行了一段时间的抗争后,他于1985年发表了著名的GNU宣言(GNU Manifesto),正式宣布要开始进行一项宏伟的计划:创造一套完全自由免费,兼容于Unix的操作系统GNU(GNU‘s Not Unix!),目的是打破大型网络供应商的垄断。现今,GNU 已成为全球最受欢迎的自由软件许可证!之后他又建立了自由软件基金会来协助该计划。他于1989年与一群律师起草了广为使用的GNU通用公共协议证书(GNU General Public License,GNU GPL),创造性地提出了“反版权”(或“版权属左”,或“开权”,copyleft)的概念。同时,GNU计划中除了最关键的Hurd操作系统内核之外,其他绝大多数软件已经完成。1991年芬兰大学生李纳斯(LinusTorvalds)在GPL条例下发布他自己创作的Linux操作系统内核,至此GNU计划正式完成,操作系统被命名为GNU/Linux(或简称Linux)。自 90 年代开始,斯托曼开始积极参加政治运动,到各间大学和场合主讲,宣扬推行自由软件的讯息,令他无论在电脑界或学术界都享负盛名!斯托曼是一名坚定的自由软件运动倡导者,与其他提倡开放源代码的人不同,斯托曼并不是从软件质量的角度而是从道德的角度来看待自由软件。他认为使用专利软件是非常不道德的事,只有附带了源代码的程序才是符合其道德标准的。对此许多人表示异议,并也因此有了自由软件运动与开源软件运动之分。
代表作— 创立自由软件GNU— Emacs 文字编辑器— GCC编译器— GDB调试器斯托曼还曾获得过多项荣誉1990年度麦克阿瑟奖(MacArthur Fellowship)1991年度美国计算机协会(Association for Computing Machinery)颁发的Grace Hopper Award以表彰他所开发的的Emacs文字编辑器1996年获颁瑞典皇家技术学院荣誉博士学位1998年度电子前线基金会(Electronic Frontier Foundation)先锋奖(Pioneer Award)1999年Yuri Rubinsky纪念奖2001年获颁格拉斯哥大学荣誉博士学位2001年武田研究奖励赏(武田研究奨励赏)2002年成为美国国家工程院院士2003年获颁布鲁塞尔大学荣誉博士学位Richard Stallman与中国“龙芯”
其他有开源社区精神领袖之称的Richard Stallman在多个场合呼吁开源社区大力支持基于龙芯电脑的软件开发,主要原因是在OLPC项目使用微软的操作系统,走商业化道路后,龙芯在2009年是唯一坚持开源的电脑CPU。RMS(记录管理系统)是MIDP的一个子系统。为开发者提供了数据持久性存储的解决方案,应用程序的数据可以在MIDlet多次调用之后依然保持不变,即使重新启动设备或者更换电池也不会造成数据丢失。
建模软件
Reservior Modeling System
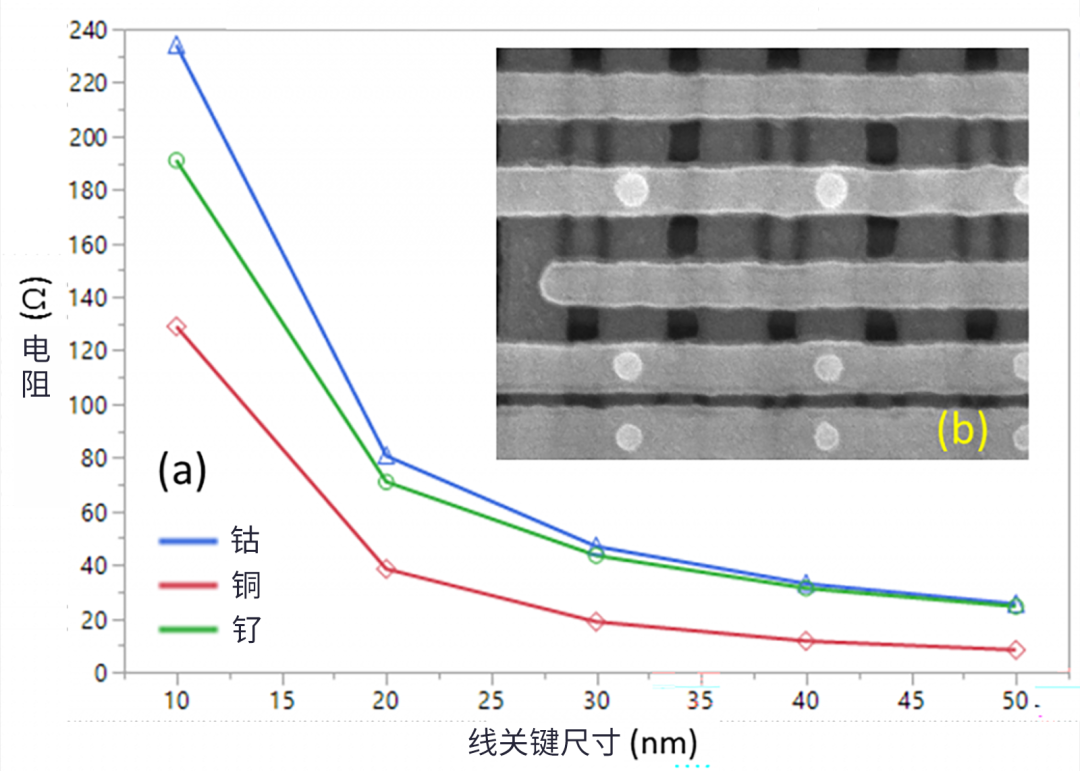
简介建模数模一体化综合研究平台RMS(Reservoir Modeling System)是三维地质建模软件的鼻祖。其前身是工业界第一款地质建模软件IRAP(Geomatic公司,1987年),1995年IRAP被ROXAR收购后与ResView、STORM等软件整合成为IRAP RMS。发展到今天RMS已经成为一个完善的从勘探到开发的建模数模一体化综合研究平台,为用户提供四个核心技术方案以帮助客户提高投资回报:油气藏地质建模解决方案 RMS一体化建模流程油气藏数值模拟解决方案油气藏风险评估解决方案钻井设计和随钻跟踪解决方案
RMS一体化建模流程油气藏数值模拟解决方案油气藏风险评估解决方案钻井设计和随钻跟踪解决方案
技术优势1.复杂构造建模⒈1RMS的复杂构造建模算法是业界最优的,对于犁式断层、分支断层、滑脱断层、逆断层、地堑、岩丘等的解决效果优于其他同类软件。 1.2构造建模的质量控制便捷,可以大大提高工作效率。一体化的断层建模流程不再采用PillarGriding算法,可以很好地处理断层之间的交切关系,编辑便捷,不用重新进行断层运算。层面的质量控制也只需鼠标点击快速运算即可,可以节省大量的时间。⒈3网格设计最优,其他同类产品不具备。如图是RMS独有的“Air Interpretation”网格搭建方法,能更逼近真实地层情况。
1.2构造建模的质量控制便捷,可以大大提高工作效率。一体化的断层建模流程不再采用PillarGriding算法,可以很好地处理断层之间的交切关系,编辑便捷,不用重新进行断层运算。层面的质量控制也只需鼠标点击快速运算即可,可以节省大量的时间。⒈3网格设计最优,其他同类产品不具备。如图是RMS独有的“Air Interpretation”网格搭建方法,能更逼近真实地层情况。
 2.相建模方法丰富、技术领先。2.1序贯指示模拟法独有的去噪处理可以很好地消除随机算法引起的误差,而其它软件只能平滑而不能降噪。⒉2序贯指示模拟变变差函数,辅助多物源方向模拟效果最优。⒉3一般示性点模拟法可以精细刻画目标体的几何形态及细微差异,该算法是其它建模软件不具备的。⒉4示性点模拟是RMS软件独有的河流相模拟算法,可以模拟多种河道类型,可以选择不同的按钮模拟不同的单河道或多河道选项控制最终的模拟结果。⒉5地震-沉积相模拟算法是RMS独有的基于目标的模拟算法,可以将多个精细地震数据上提取的多边形都模拟到目标体中去。3.属性建模⒊1自动评估主方向。⒊2内置J函数的饱和度模拟算法。4.网格粗化时使用“控制线”控制网格粗化,三维交互式编辑网格。5.真正集成的三维三相的黑油模拟器,不需要定义关键字。6.经过试井分析校正的裂缝建模。7.考虑因素全面(破碎因子、胶结因子和泥岩涂抹)的断层封堵性分析。8.模块选择灵活性大,必选模块只有一个,其它均可选,更节省资源。
2.相建模方法丰富、技术领先。2.1序贯指示模拟法独有的去噪处理可以很好地消除随机算法引起的误差,而其它软件只能平滑而不能降噪。⒉2序贯指示模拟变变差函数,辅助多物源方向模拟效果最优。⒉3一般示性点模拟法可以精细刻画目标体的几何形态及细微差异,该算法是其它建模软件不具备的。⒉4示性点模拟是RMS软件独有的河流相模拟算法,可以模拟多种河道类型,可以选择不同的按钮模拟不同的单河道或多河道选项控制最终的模拟结果。⒉5地震-沉积相模拟算法是RMS独有的基于目标的模拟算法,可以将多个精细地震数据上提取的多边形都模拟到目标体中去。3.属性建模⒊1自动评估主方向。⒊2内置J函数的饱和度模拟算法。4.网格粗化时使用“控制线”控制网格粗化,三维交互式编辑网格。5.真正集成的三维三相的黑油模拟器,不需要定义关键字。6.经过试井分析校正的裂缝建模。7.考虑因素全面(破碎因子、胶结因子和泥岩涂抹)的断层封堵性分析。8.模块选择灵活性大,必选模块只有一个,其它均可选,更节省资源。
共享系统
数字资源管理共享系统Queran RMS是确然公司凭借在网络、多媒体、元数据方面多年积累的经验,自主研发的是基于“流媒体技术”和“元数据技术”,将各种多媒体资源(如视音频、图形图像、电子书、各种文档等)进行统一定义、管理,并为最终用户提供检索、浏览、在线播放等服务的系统。产品优势立足于“元数据技术”和“流媒体技术”构建—站式多媒体资源服务平台提供多媒体资源统一检索、揭示和高性能点播服务实现“以用户为中心”的资源社区化建设 RMS:可靠性、维修性和保障性RMS为可靠性Realibility、维修性Maintainability和保障性supportability的缩写。在国防科技和武器装备、航空航天、轨道交通等领域陆续推行可靠性、维修性和综合保障标准RMS。
RMS:可靠性、维修性和保障性RMS为可靠性Realibility、维修性Maintainability和保障性supportability的缩写。在国防科技和武器装备、航空航天、轨道交通等领域陆续推行可靠性、维修性和综合保障标准RMS。

振动的概念振动是一种普遍存在于自然界和工程领域的现象,它指的是物体或质点在其平衡位置附近进行的往复运动。在机械系统中,振动表现为位移、速度和加速度的周期...

好多网友对这样一个问题有些迷茫,就是, 关于易电源模块的前级和后级使用电解电容的问题,为什么和我们习惯设计不一样?当只给你一个有极性的电解电容时,到底是...
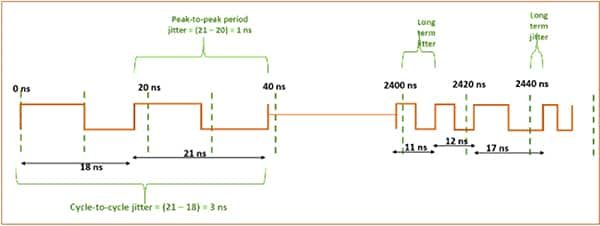
作者:Bill Schweber 投稿人:DigiKey 北美编辑 通过为系统组件确定步调,时钟振荡器为现代电路提供定时。随着系统速度提高到数百 MHz...
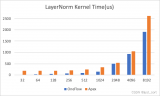
我去实测了一下,单机8卡A100训练LLama7B,纯数据并行的情况下打开memory_efficient开关相比于不打开节省了大约2个G的显存,如果模...
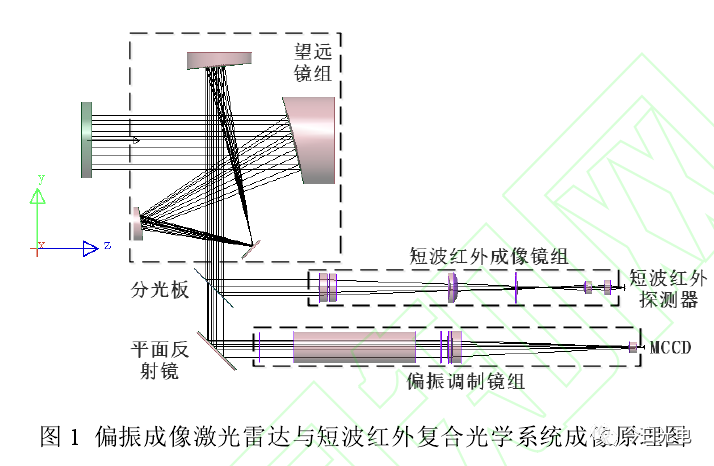
三维成像激光雷达因具备主动照明、角度分辨率高、可探测距离信息等优势,被视为是被动遥感和微波雷达后的下一代技术产品,与传统被动传感器成像及微波雷达相比,三...
第1部分定义并描述了承载这些低电流的设计,解释了设计这些电路时出现的问题,并研究了屏蔽和防护方法的应用。在第 2 部分中,将研究元件选择如何影响低泄漏电...
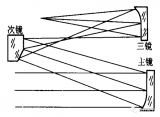
利用Zemax光学设计软件与自编计算机辅助装调软件,实现了对大口径、长焦距、无中心遮拦离轴三反射镜光学系统的装调。

llama.cpp 的代码结构比较直观,如下所示,为整体代码结构中的比较核心的部分的代码结构
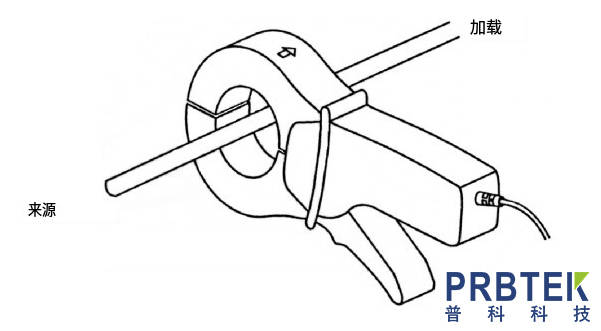
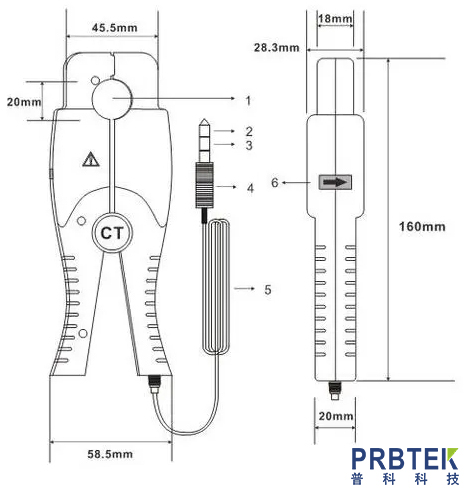
泰克TEKTRONIX示波器电流钳电流探头A621的安装使用说明
泰克A621电流探头能够在泰克TDS、TAS或通用示波器上显示高达1000安培RMS的电流波形。A621特别适用于需要显示和测量畸变电流波形和谐波的场合...

多光谱红外探测技术能丰富遥感载荷的图像信息,提高图像的反演精度,而多透镜和多波段探测器集成封装设计能缩小光学载荷体积,同时节约制冷资源。
电能质量标准中常用术语和定义的解读:10、RMS事件源扰动方向的定位对识别故障源和方向至关重要。暂降源方向可以通过监测电压和电流之间的关系来确定。德国G...

无论你只是随意浏览还是正在寻求问题的答案,请花点时间阅读我们整理的电能质量常见技术问题和对应的解决方法。通过阅读以下内容,你可能都不需要我们的技术支持人...
什么是真RMS钳位呢?为什么我们需要使用真RMS钳位呢? 真RMS钳位是一种测量电流或电压的仪器,能够准确测量非正弦波形信号的有效值。RMS是“均方根”...
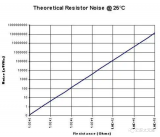
噪声分析、误差分析中,什么类型的噪声、误差可以用均方根计算?
噪声分析、误差分析中,什么类型的噪声、误差可以用均方根计算?什么类型的噪声需要直接加在总噪声中? 在噪声分析和误差分析中,我们常常使用均方根(Root ...
在电力领域,电流测量是非常重要的。然而,准确测量电流并不总是一件容易的事情。传统的电流探头只能测量交流电的有效值,也就是所谓的RMS值。然而,在某些情况...

9月22日,以“物流科技助力光伏产业开启太瓦时代”为主题的2023全国新能源(光伏)供应链与物流技术峰会在江苏·常州隆重召开,寻迹智行受邀如期参加,现场...
380v电压谐波畸变率标准 随着工业、商业和家庭电气化的日益发展,电气设备的种类和数量不断增加,使得电网电压波形变形的现象日益普遍。电气设备的使用不仅...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1