完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > agv机器人
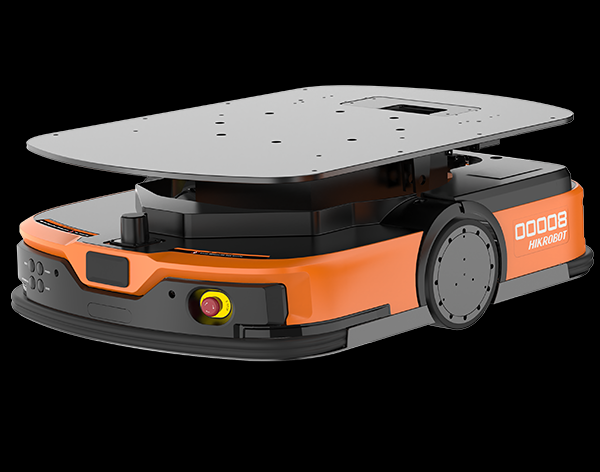
Agv机器人分为硬件部分和软件部分。硬件部分是车体部分车身和机械手组成;软件部分是指AGV控制系统由AGV的导航,AGV的路线规划,AGV的导引控制组成。AGV需要根据ERP系统发出指令,完成零件提取,辅助装配,成品发货等工作。所以说,在未来的高端制造业中,AGV应用广泛,市场潜力巨大,扮演了很重要的角色。
Agv机器人分为硬件部分和软件部分。硬件部分是车体部分车身和机械手组成;软件部分是指AGV控制系统由AGV的导航,AGV的路线规划,AGV的导引控制组成。AGV需要根据ERP系统发出指令,完成零件提取,辅助装配,成品发货等工作。所以说,在未来的高端制造业中,AGV应用广泛,市场潜力巨大,扮演了很重要的角色。
AGV机器人的机械手可进行伸缩、上下移动及旋转等操作;控制系统是系统的中枢,它将电机驱动、传感器信号、定位算法、机械手动作及无线通讯等功能整合在一起,完成上位机对AGV机器人发出控制指令如运动方向、装卸、停靠及避障等。


一、行业背景你有没有网购过呢?想必在互联网普及的现在,大家基本上都有一定的网购经验,或多或少都有所接触,而电商行业发展至今也已经有了一套极其完善的产业链...

美国供应链管理专业协会对AGV的定义:自动导引小车,是指装备有电磁或光学等自动导引装置,可以在规定的导航路径上行驶,是具有安全保护以及各种移载功能的运输小车。
随着科技的发展,越来越多的工业机器人应用于智能工厂。AGV作为运搬运类的机器人,其适用性非常广,智能工厂、大型无人工厂、熄灯工厂、小型、零散而分散的制造...

智能制造时代的到来,使得一些制药设备企业也开始在医药机器人上发力,以便实现制药设备制造过程的智能化,实现药品生产的智能化。比如,在灌装、检测、无菌转运、...

AGV AGV小车虽然体积小巧,但这并不影响它强大的负重能力,它不需要人工去操作驾驶,能够实现无人搬运车的功能,而且随着AGV小车的发展,已经从最传统普...
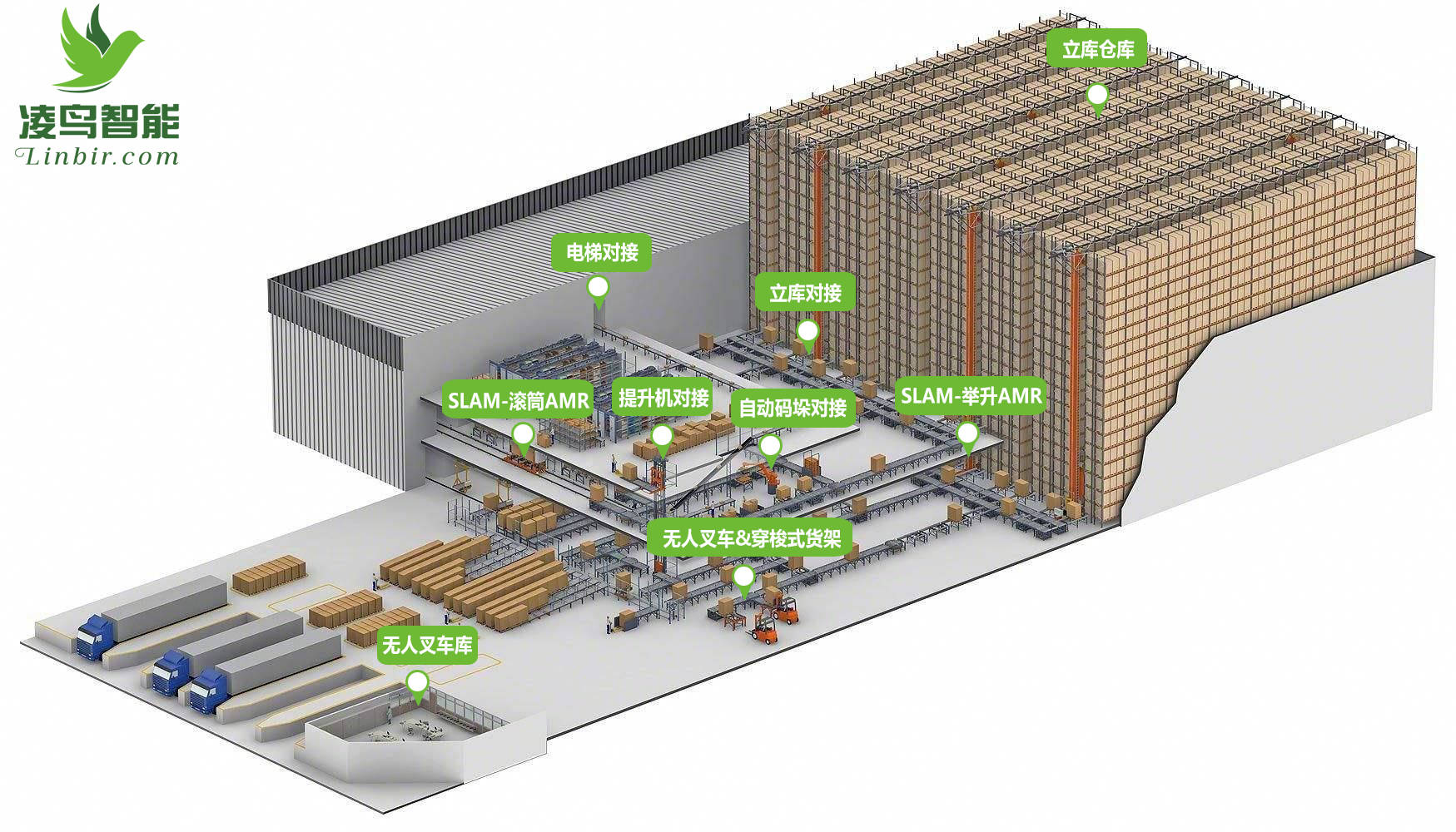
随着市场细分,企业竞争激烈,基于客户需求的个性化产品生产成为必然选择。柔性生产模式越来越明显,制造业必须升级,而内部物流则成为最佳切入点。AGV根据...
随着科技的迅猛发展,制造业正面临着前所未有的变革。企业急需通过信息化手段提高生产效率、降低成本并增强市场竞争力。然而,在迈向智慧工厂的道路上,制造企业遭...

AGV机器人作为智能制造的核心,正逐渐取代人工搬运,实现智能仓储无人化管理。它通过集成5G、大数据、物联网等技术,成为具有实时感应、安全识别等功能的智能...

停车机器人是用于在停车场或车库等场所中进行车辆的自动停放和取车操作。随着智能交通和智能城市的发展,停车机器人在解决停车难、提高停车效率和减少停车空间浪费...
在追求极限成本、极限效率、极限制造的锂电领域,深入推进数字化转型,已从观念、目标、口号过渡至具体方案落地、逐步向锂电全域工厂渗透。

不得不说,目前AGV机器人已经实现从传统单体智能向新型大规模群体智能升级,运行精度更高、场景适应性更强,运行效率更高。自2018年研发出第一款应用于汽车...

【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
随着机器人技术的不断发展,我们可以在许多简单重复,危险的岗位上看到机器人的身影,移动机器人凭借其在复杂环境下工作,具有自行感知、自行规划、自我决策功能的...
舵轮,是一个新兴的智能高科技产业链。它集成了驱动电机、转向电机、减速机等一体化的机械结构,集产品、行走、牵引和转向功能为一体,可以荷载和牵引较重货物。可...
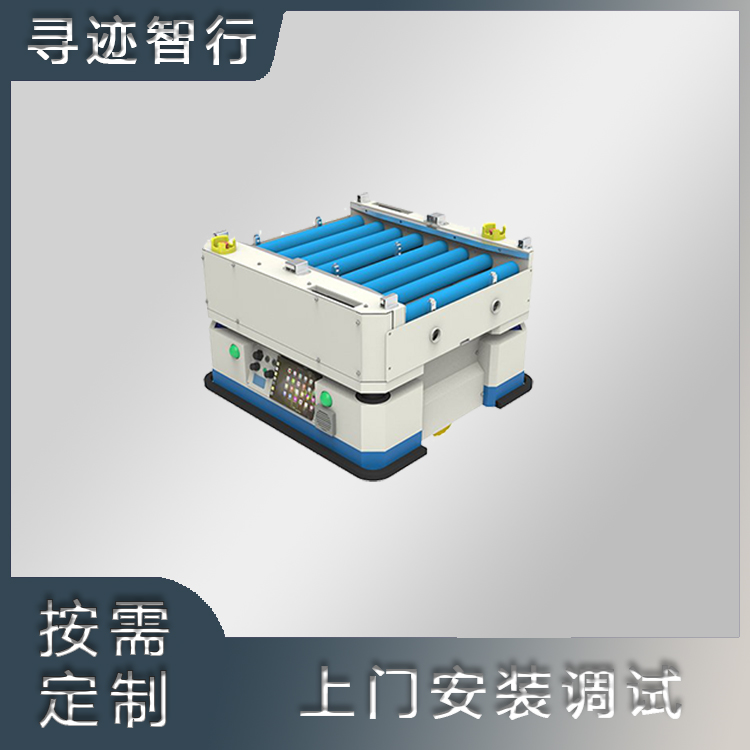
目前市场上AGV机器人多数使用镍镉蓄电池,镍氢蓄电池,锂电池和铅酸蓄电池,下面寻迹智行就对以上几种类型的电池进行简单比较:
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS | harmonyos |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

