完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > fifo
First Input First Output的缩写,先入先出队列,这是一种传统的按序执行方法,先进入的指令先完成并引退,跟着才执行第二条指令。
在计算机中,先入先出队列是一种传统的按序执行方法,先进入的指令先完成并引退,跟着才执行第二条指令(指令就是计算机在响应用户操作的程序代码,对用户而言是透明的)。如图1所示,当CPU在某一时段来不及响应所有的指令时,指令就会被安排在FIFO队列中,比如0号指令先进入队列,接着是1号指令、2号指令……当CPU完成当前指令以后就会从队列中取出0号指令先行执行,此时1号指令就会接替0号指令的位置,同样,2号指令、3号指令……都会向前挪一个位置,这样解释大家清楚了吧?
First Input First Output的缩写,先入先出队列,这是一种传统的按序执行方法,先进入的指令先完成并引退,跟着才执行第二条指令。
FIFO简介
在计算机中,先入先出队列是一种传统的按序执行方法,先进入的指令先完成并引退,跟着才执行第二条指令(指令就是计算机在响应用户操作的程序代码,对用户而言是透明的)。如图1所示,当CPU在某一时段来不及响应所有的指令时,指令就会被安排在FIFO队列中,比如0号指令先进入队列,接着是1号指令、2号指令……当CPU完成当前指令以后就会从队列中取出0号指令先行执行,此时1号指令就会接替0号指令的位置,同样,2号指令、3号指令……都会向前挪一个位置,这样解释大家清楚了吧?
图1 先进先出队列FIFO是队列机制中最简单的,每个接口上都存在FIFO队列,表面上看FIFO队列并没有提供什么QoS(Quality of Service,服务质量)保证,甚至很多人认为FIFO严格意义上不算做一种队列技术,实则不然,FIFO是其它队列的基础,FIFO也会影响到衡量QoS的关键指标:报文的丢弃、延时、抖动。既然只有一个队列,自然不需要考虑如何对报文进行复杂的流量分类,也不用考虑下一个报文怎么拿、拿多少的问题,而且因为按顺序取报文,FIFO无需对报文重新排序。简化了这些实现其实也就提高了对报文时延的保证。FIFO关心的就是队列长度问题,队列长度会影响到时延、抖动、丢包率。因为队列长度是有限的,有可能被填满,这就涉及到该机制的丢弃原则。常见的一个丢弃原则叫做Tail Drop机制。简单地说就是该队列如果已经满了,那么后续进入的报文被丢弃,而没有什么机制来保证后续的报文可以挤掉已经在队列内的报文。在这种机制中,如果定义了较长的队列长度,那么队列不容易填满,被丢弃的报文也就少了,但是队列长度太长了会出现时延的问题,一般情况下时延的增加会导致抖动也增加。如果定义了较短的队列,时延的问题可以得到解决,但是发生Tail Drop的报文就变多了。
FIFO队列原理简述
FIFO队列不对报文进行分类,当报文进入接口的速度大于接口能发送的速度时,FIFO按报文到达接口的先后顺序让报文进入队列,同时,FIFO在队列的出口让报文按进队的顺序出队,先进的报文将先出队,后进的报文将后出队。FIFO队列具有处理简单,开销小的优点。但FIFO不区分报文类型,采用尽力而为的转发模式,使对时间敏感的实时应用(如VoIP)的延迟得不到保证,关键业务的带宽也不能得到保证。
使用FIFO
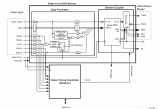
FIFO一般用于不同时钟域之间的数据传输,比如FIFO的一端是AD数据采集,另一端是计算机的PCI总线,假设其AD采集的速率为16位 100K SPS,那么每秒的数据量为100K×16bit=1.6Mbps,而PCI总线的速度为33MHz,总线宽度32bit,其最大传输速率为1056Mbps,在两个不同的时钟域间就可以采用FIFO来作为数据缓冲。另外对于不同宽度的数据接口也可以用FIFO,例如单片机位8位数据输出,而DSP可能是16位数据输入,在单片机与DSP连接时就可以使用FIFO来达到数据匹配的目的。
重要参数
FIFO的宽度:也就是英文资料里常看到的THE WIDTH,它指的是FIFO一次读写操作的数据位,就像MCU有8位和16位,ARM32位等等,FIFO的宽度在单片成品IC中是固定的,也有可选择的,如果用FPGA自己实现一个FIFO,其数据位,也就是宽度是可以自己定义的。
FIFO的深度:THE DEEPTH,它指的是FIFO可以存储多少个N位的数据(如果宽度为N)。如一个8位的FIFO,若深度为8,它可以存储8个8位的数据,深度为12 ,就可以存储12个8位的数据,FIFO的深度可大可小,个人认为FIFO深度的计算并无一个固定的公式。在FIFO实际工作中,其数据的满/空标志可以控制数据的继续写入或读出。在一个具体的应用中不可能由一些参数精确算出所需的FIFO深度为多少,这在写速度大于读速度的理想状态下是可行的,但在实际中用到的FIFO深度往往要大于计算值。一般来说根据电路的具体情况,在兼顾系统性能和FIFO成本的情况下估算一个大概的宽度和深度就可以了。而对于写速度慢于读速度的应用,FIFO的深度要根据读出的数据结构和读出数据由那些具体的要求来确定。
满标志:FIFO已满或将要满时由FIFO的状态电路送出的一个信号,以阻止FIFO的写操作继续向FIFO中写数据而造成溢出(overflow)。
空标志:FIFO已空或将要空时由FIFO的状态电路送出的一个信号,以阻止FIFO的读操作继续从FIFO中读出数据而造成无效数据的读出(underflow)。
读时钟:读操作所遵循的时钟,在每个时钟沿来临时读数据。
写时钟:写操作所遵循的时钟,在每个时钟沿来临时写数据。
读指针:指向下一个读出地址。读完后自动加1。
写指针:指向下一个要写入的地址的,写完自动加1。
读写指针其实就是读写的地址,只不过这个地址不能任意选择,而是连续的。
4.FIFO的分类
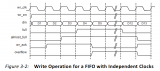
根据FIFO工作的时钟域,可以将FIFO分为同步FIFO和异步FIFO。同步FIFO是指读时钟和写时钟为同一个时钟。在时钟沿来临时同时发生读写操作。异步FIFO是指读写时钟不一致,读写时钟是互相独立的。
5.FIFO设计的难点
FIFO设计的难点在于怎样判断FIFO的空/满状态。为了保证数据正确的写入或读出,而不发生溢出或读空的状态出现,必须保证FIFO在满的情况下,不能进行写操作。在空的状态下不能进行读操作。怎样判断FIFO的满/空就成了FIFO设计的核心问题。由于同步FIFO几乎很少用到,这里只描述异步FIFO的空/满标志产生问题。
在用到触发器的设计中,不可避免的会遇到亚稳态的问题(关于亚稳态这里不作介绍,可查看相关资料)。在涉及到触发器的电路中,亚稳态无法彻底消除,只能想办法将其发生的概率将到最低。其中的一个方法就是使用格雷码。格雷码在相邻的两个码元之间只由一位变换(二进制码在很多情况下是很多码元在同时变化)。这就会避免计数器与时钟同步的时候发生亚稳态现象。但是格雷码有个缺点就是只能定义2^n的深度,而不能像二进制码那样随意的定义FIFO的深度,因为格雷码必须循环一个2^n,否则就不能保证两个相邻码元之间相差一位的条件,因此也就不是真正的格雷码了。第二就是使用冗余的触发器,假设一个触发器发生亚稳态的概率为P,那么两个级联的触发器发生亚稳态的概率就为P的平方。但这会导致延时的增加。亚稳态的发生会使得FIFO出现错误,读/写时钟采样的地址指针会与真实的值之间不同,这就导致写入或读出的地址错误。由于考虑延时的作用,空/满标志的产生并不一定出现在FIFO真的空/满时才出现。可能FIFO还未空/满时就出现了空/满标志。这并没有什么不好,只要保证FIFO不出现overflow or underflow 就OK了。
很多关于FIFO的文章其实讨论的都是空/满标志的不同算法问题。
在Vijay A. Nebhrajani的《异步FIFO结构》一文中,作者提出了两个关于FIFO空/满标志的算法。
第一个算法:构造一个指针宽度为N+1,深度为2^N字节的FIFO(为方便比较,将格雷码指针转换为二进制指针)。当指针的二进制码中最高位不一致而其它N位都相等时,FIFO为满(在Clifford E. Cummings的文章中以格雷码表示是前两位均不相同,而后两位LSB相同为满,这与换成二进制表示的MSB不同其他相同为满是一样的)。当指针完全相等时,FIFO为空。这也许不容易看出,举个例子说明一下:一个深度为8字节的FIFO怎样工作(使用已转换为二进制的指针)。FIFO_WIDTH=8,FIFO_DEPTH= 2^N = 8,N = 3,指针宽度为N+1=4。起初rd_ptr_bin和wr_ptr_bin均为“0000”。此时FIFO中写入8个字节的数据。wr_ptr_bin =“1000”,rd_ptr_bin=“0000”。当然,这就是满条件。现在,假设执行了8次的读操作,使得rd_ptr_bin =“1000”,这就是空条件。另外的8次写操作将使wr_ptr_bin 等于“0000”,但rd_ptr_bin 仍然等于“1000”,因此FIFO为满条件。
显然起始指针无需为“0000”。假设它为“0100”,并且FIFO为空,那么8个字节会使wr_ptr_bin =“1100”,, rd_ptr_bin 仍然为“0100”。这又说明FIFO为满。
在Vijay A. Nebhrajani的这篇《异步FIFO结构》文章中说明了怎样运用格雷码来设置空满的条件,但没有说清为什么深度为8的FIFO其读写指针要用3+1位的格雷码来实现,而3+1位的格雷码可以表示16位的深度,而真实的FIFO只有8位,这是怎么回事?而这个问题在Clifford E. Cummings的文章中得以解释。三位格雷码可表示8位的深度,若在加一位最为MSB,则这一位加其他三位组成的格雷码并不代表新的地址,也就是说格雷码的0100表示表示7,而1100仍然表示7,只不过格雷码在经过一个以0位MSB的循环后进入一个以1为MSB的循环,然后又进入一个以0位MSB的循环,其他的三位码仍然是格雷码,但这就带来一个问题,在0100的循环完成后,进入1000,他们之间有两位发生了变换,而不是1位,所以增加一位MSB的做法使得该码在两处:0100~1000,1100~0000有两位码元发生变化,故该码以不是真正的格雷码。增加的MSB是为了实现空满标志的计算。Vijay A. Nebhrajani的文章用格雷码转二进制,再转格雷码的情况下提出空满条件,仅过两次转换,而Clifford E. Cummings的文章中直接在格雷码条件下得出空满条件。其实二者是一样的,只是实现方式不同罢了。
第二种算法:Clifford E. Cummings的文章中提到的STYLE#2。它将FIFO地址分成了4部分,每部分分别用高两位的MSB 00 、01、 11、 10决定FIFO是否为going full 或going empty (即将满或空)。如果写指针的高两位MSB小于读指针的高两位MSB则FIFO为“几乎满”,
若写指针的高两位MSB大于读指针的高两位MSB则FIFO为“几乎空”。
在Vijay A. Nebhrajani的《异步FIFO结构》第三部分的文章中也提到了一种方法,那就是方向标志与门限。设定了FIFO容量的75%作为上限,设定FIFO容量的25%为下限。当方向标志超过门限便输出满/空标志,这与Clifford E. Cummings的文章中提到的STYLE #2可谓是异曲同工。他们都属于保守的空满判断。其实这时输出空满标志FIFO并不一定真的空/满。
说到此,我们已经清楚地看到,FIFO设计最关键的就是产生空/满标志的算法的不同产生了不同的FIFO。但无论是精确的空满还是保守的空满都是为了保证FIFO工作的可靠。


FIFO(First in First out)为先进先出队列,具有存储功能,可用于不同时钟域间传输数据以及不同的数据宽度进行数据匹配。如其名称,数据传...
一文详解Video In to AXI4-Stream IP核
Video In to AXI4-Stream IP核用于将视频源(带有同步信号的时钟并行视频数据,即同步sync或消隐blank信号或者而后者皆有)转...

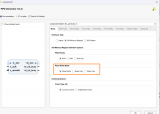
前言:TSMaster目前有两种读取报文的模式:回调函数模式和fifo模式。fifo函数是TSMaster近期新增的函数,本文将重点介绍fifo模块。关...
AXI接口FIFO是从Native接口FIFO派生而来的。AXI内存映射接口提供了三种样式:AXI4、AXI3和AXI4-Lite。除了Native接口...

SDRAM控制器的设计——Sdram_Control.v代码解析(异步FIFO读写模块、读写SDRAM过程)
前言 SDRAM控制器里面包含5个主要的模块,分别是PLL模块,异步FIFO 写模块,异步FIFO读模块,SDRAM接口控制模块,SDRAM指令执行模块...

为了加深读者对 FPGA 端控制架构的印象,在数据读取的控制部分,首先我们可以将SDRAM 想作是一个自来水厂,清水得先送至用户楼上的水塔中存放,在家里...

一、 导读 前几天一位搞电气的朋友问S7-1200中如何做个先入先出的功能,说原来用S7-200SMART的时候有填表指令和FIFO指令可以实现该...

在数字设计中,利用FIFO进行数据处理是非常普遍的应用,例如,实现时钟域交叉、低延时存储器缓存、总线位宽调整等。下图给出了FIFO生成器支持的一种可能配置。
过采样原理在ADXL345上的实现、配置步骤、数据处理及噪声考虑因素,以提高其输出分辨率
介绍了过采样技术在 ADXL345 三轴加速度计中的应用,包括过采样原理在 ADXL345 上的实现、配置步骤、数据处理及噪声考虑因素,以提高其输出分辨...
FIFO作为FPGA岗位求职过程中最常被问到的基础知识点,也是项目中最常被使用到的IP,其意义是非常重要的。本文基于对FIFO Generator的Xi...

陀螺仪LSM6DSOW开发(4)----中断获取FIFO数据
本文将探讨如何使用中断机制获取FIFO数据并应用MotionFX库解析空间坐标。MotionFX库是一种用于传感器融合的强大工具,可以将加速度计、陀螺仪...
美新半导体宣布3轴AMR地磁传感器荣膺“年度最佳传感器/MEMS奖项”
2024年3月29日,由全球电子技术领域知名媒体集团ASPENCORE举办的"2024年度中国IC领袖峰会暨中国IC设计成就奖颁奖典礼&quo...
请问异步FIFO的溢出操作时怎么样判断的? 异步FIFO是数据传输的一种常用方式,在一些储存器和计算机系统中,常常会用到异步FIFO。作为一种FIFO,...
同步FIFO和异步FIFO的区别 同步FIFO和异步FIFO各在什么情况下应用
同步FIFO和异步FIFO的区别 同步FIFO和异步FIFO各在什么情况下应用? 1. 同步FIFO和异步FIFO的区别 同步FIFO和异步FIFO在处...
2023-10-18 标签:fifo 1932 0
为什么异步fifo中读地址同步在写时钟域时序分析不通过? 异步FIFO中读地址同步在写时钟域时序分析不通过的原因可能有以下几个方面: 1. 读地址同步在...
fpga跨时钟域通信时,慢时钟如何读取快时钟发送过来的数据?
fpga跨时钟域通信时,慢时钟如何读取快时钟发送过来的数据? 在FPGA设计中,通常需要跨时钟域进行数据通信。跨时钟域通信就是在不同的时钟域之间传输数据...

芯教程|平头哥助力昊芯HX2000系列芯片专题SCI串口通讯奇偶校验(二)SCI增强FIFO
自昊芯推出专题讲解SCI串口通讯奇偶校验,分为两期讲解,上期主要讲解标准SCI模式下的奇偶校验,本期主要讲解增强FIFO模式下的奇偶校验。HX2000系...
异步fifo详解 一. 什么是异步FIFO FIFO即First in First out的英文简称,是一种先进先出的数据缓存器,与普通存储器的区别在于...
2022-12-12 标签:fifo 4540 0
一、FIFO简介 FIFO是英文First In First Out 的缩写,是一种先进先出的数据缓存器,它与普通存储器的区别是没有外部读...
FIFO的分类根均FIFO工作的时钟域,可以将FIFO分为同步FIFO和异步FIFO。同步FIFO是指读时钟和写时钟为同一个时钟。在时钟沿来临时同时发生...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS | harmonyos |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

