完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > RAID

磁盘阵列是由很多价格较便宜的磁盘,组合成一个容量巨大的磁盘组,利用个别磁盘提供数据所产生加成效果提升整个磁盘系统效能。
磁盘阵列(Redundant Arrays of Independent Disks,RAID),有“独立磁盘构成的具有冗余能力的阵列”之意。
磁盘阵列是由很多价格较便宜的磁盘,组合成一个容量巨大的磁盘组,利用个别磁盘提供数据所产生加成效果提升整个磁盘系统效能。利用这项技术,将数据切割成许多区段,分别存放在各个硬盘上。
磁盘阵列还能利用同位检查(Parity Check)的观念,在数组中任意一个硬盘故障时,仍可读出数据,在数据重构时,将数据经计算后重新置入新硬盘中。分类
磁盘阵列其样式有三种,一是外接式磁盘阵列柜、二是内接式磁盘阵列卡,三是利用软件来仿真。
磁盘阵列(Redundant Arrays of Independent Disks,RAID),有“独立磁盘构成的具有冗余能力的阵列”之意。
磁盘阵列是由很多价格较便宜的磁盘,组合成一个容量巨大的磁盘组,利用个别磁盘提供数据所产生加成效果提升整个磁盘系统效能。利用这项技术,将数据切割成许多区段,分别存放在各个硬盘上。
磁盘阵列还能利用同位检查(Parity Check)的观念,在数组中任意一个硬盘故障时,仍可读出数据,在数据重构时,将数据经计算后重新置入新硬盘中。分类
磁盘阵列其样式有三种,一是外接式磁盘阵列柜、二是内接式磁盘阵列卡,三是利用软件来仿真。
外接式磁盘阵列柜最常被使用大型服务器上,具可热交换(Hot Swap)的特性,不过这类产品的价格都很贵。
内接式磁盘阵列卡,因为价格便宜,但需要较高的安装技术,适合技术人员使用操作。硬件阵列能够提供在线扩容、动态修改阵列级别、自动数据恢复、驱动器漫游、超高速缓冲等功能。它能提供性能、数据保护、可靠性、可用性和可管理性的解决方案。阵列卡专用的处理单元来进行操作。
利用软件仿真的方式,是指通过网络操作系统自身提供的磁盘管理功能将连接的普通SCSI卡上的多块硬盘配置成逻辑盘,组成阵列。软件阵列可以提供数据冗余功能,但是磁盘子系统的性能会有所降低,有的降低幅度还比较大,达30%左右。因此会拖累机器的速度,不适合大数据流量的服务器。
原理
磁盘阵列作为独立系统在主机外直连或通过网络与主机相连。磁盘阵列有多个端口可以被不同主机或不同端口连接。一个主机连接阵列的不同端口可提升传输速度。
和当时PC用单磁盘内部集成缓存一样,在磁盘阵列内部为加快与主机交互速度,都带有一定量的缓冲存储器。主机与磁盘阵列的缓存交互,缓存与具体的磁盘交互数据。
在应用中,有部分常用的数据是需要经常读取的,磁盘阵列根据内部的算法,查找出这些经常读取的数据,存储在缓存中,加快主机读取这些数据的速度,而对于其他缓存中没有的数据,主机要读取,则由阵列从磁盘上直接读取传输给主机。对于主机写入的数据,只写在缓存中,主机可以立即完成写操作。然后由缓存再慢慢写入磁盘。
优缺点
优点
提高传输速率。RAID通过在多个磁盘上同时存储和读取数据来大幅提高存储系统的数据吞吐量(Throughput)。在RAID中,可以让很多磁盘驱动器同时传输数据,而这些磁盘驱动器在逻辑上又是一个磁盘驱动器,所以使用RAID可以达到单个磁盘驱动器几倍、几十倍甚至上百倍的速率。这也是RAID最初想要解决的问题。因为当时CPU的速度增长很快,而磁盘驱动器的数据传输速率无法大幅提高,所以需要有一种方案解决二者之间的矛盾。RAID最后成功了。
通过数据校验提供容错功能。普通磁盘驱动器无法提供容错功能,如果不包括写在磁盘上的CRC(循环冗余校验)码的话。RAID容错是建立在每个磁盘驱动器的硬件容错功能之上的,所以它提供更高的安全性。在很多RAID模式中都有较为完备的相互校验/恢复的措施,甚至是直接相互的镜像备份,从而大大提高了RAID系统的容错度,提高了系统的稳定冗余性。
缺点
RAID0没有冗余功能,如果一个磁盘(物理)损坏,则所有的数据都无法使用。RAID1磁盘的利用率最高只能达到50%(使用两块盘的情况下),是所有RAID级别中最低的。RAID0+1以理解为是RAID 0和RAID 1的折中方案。RAID 0+1可以为系统提供数据安全保障,但保障程度要比 Mirror低而磁盘空间利用率要比Mirror高。
RAID级别
1、RAID 0
RAID 0是最早出现的RAID模式,即Data Stripping数据分条技术。RAID 0是组建磁盘阵列中最简单的一种形式,只需要2块以上的硬盘即可,成本低,可以提高整个磁盘的性能和吞吐量。RAID 0没有提供冗余或错误修复能力,但实现成本是最低的。
RAID 0最简单的实现方式就是把N块同样的硬盘用硬件的形式通过智能磁盘控制器或用操作系统中的磁盘驱动程序以软件的方式串联在一起创建一个大的卷集。在使用中电脑数据依次写入到各块硬盘中,它的最大优点就是可以整倍的提高硬盘的容量。如使用了三块80GB的硬盘组建成RAID 0模式,那么磁盘容量就会是240GB。其速度方面,各单独一块硬盘的速度完全相同。最大的缺点在于任何一块硬盘出现故障,整个系统将会受到破坏,可靠性仅为单独一块硬盘的1/N。
为了解决这一问题,便出现了RAID 0的另一种模式。即在N块硬盘上选择合理的带区来创建带区集。其原理就是将原先顺序写入的数据被分散到所有的四块硬盘中同时进行读写。四块硬盘的并行操作使同一时间内磁盘读写的速度提升了4倍。
在创建带区集时,合理的选择带区的大小非常重要。如果带区过大,可能一块磁盘上的带区空间就可以满足大部分的I/O操作,使数据的读写仍然只局限在少数的一、两块硬盘上,不能充分的发挥出并行操作的优势。另一方面,如果带区过小,任何I/O指令都可能引发大量的读写操作,占用过多的控制器总线带宽。因此,在创建带区集时,我们应当根据实际应用的需要,慎重的选择带区的大小。
带区集虽然可以把数据均匀的分配到所有的磁盘上进行读写。但如果我们把所有的硬盘都连接到一个控制器上的话,可能会带来潜在的危害。这是因为当我们频繁进行读写操作时,很容易使控制器或总线的负荷 超载。为了避免出现上述问题,建议用户可以使用多个磁盘控制器。最好解决方法还是为每一块硬盘都配备一个专门的磁盘控制器。
虽然RAID 0可以提供更多的空间和更好的性能,但是整个系统是非常不可靠的,如果出现故障,无法进行任何补救。所以,RAID 0一般只是在那些对数据安全性要求不高的情况下才被人们使用。
2、RAID 1
RA
ID 1称为磁盘镜像,原理是把一个磁盘的数据镜像到另一个磁盘上,也就是说数据在写入一块磁盘的同时,会在另一块闲置的磁盘上生成镜像文件,在不影响性能情况下最大限度的保证系统的可靠性和可修复性上,只要系统中任何一对镜像盘中至少有一块磁盘可以使用,甚至可以在一半数量的硬盘出现问题时系统都可以正常运行,当一块硬盘失效时,系统会忽略该硬盘,转而使用剩余的镜像盘读写数据,具备很好的磁盘冗余能力。虽然这样对数据来讲绝对安全,但是成本也会明显增加,磁盘利用率为50%,以四块80GB容量的硬盘来讲,可利用的磁盘空间仅为160GB。另外,出现硬盘故障的RAID系统不再可靠,应当及时的更换损坏的硬盘,否则剩余的镜像盘也出现问题,那么整个系统就会崩溃。更换新盘后原有数据会需要很长时间同步镜像,外界对数据的访问不会受到影响,只是这时整个系统的性能有所下降。因此,RAID 1多用在保存关键性的重要数据的场合。
RAID 1主要是通过二次读写实现磁盘镜像,所以磁盘控制器的负载也相当大,尤其是在需要频繁写入数据的环境中。为了避免出现性能瓶颈,使用多个磁盘控制器就显得很有必要。
3、RAID0+1
从RAID 0+1名称上我们便可以看出是RAID0与RAID1的结合体。在我们单独使用RAID 1也会出现类似单独使用RAID 0那样的问题,即在同一时间内只能向一块磁盘写入数据,不能充分利用所有的资源。为了解决这一问题,我们可以在磁盘镜像中建立带区集。因为这种配置方式综合了带区集和镜像的优势,所以被称为RAID 0+1。把RAID0和RAID1技术结合起来,数据除分布在多个盘上外,每个盘都有其物理镜像盘,提供全冗余能力,允许一个以下磁盘故障,而不影响数据可用性,并具有快速读/写能力。RAID0+1要在磁盘镜像中建立带区集至少4个硬盘。
4、RAID: LSI MegaRAID、Nytro和Syncro
MegaRAID、Nytro和Syncro都是LSI 针对RAID而推出的解决方案,并且一直在创造更新。
LSI MegaRAID的主要定位是保护数据,通过高性能、高可靠的RAID控制器功能,为数据提供高级别的保护。LSI MegaRAID在业界有口皆碑。
LSI Nytro的主要定位是数据加速,它充分利用当今备受追捧的闪存技术,极大地提高数据I/O速度。LSI Nytro包括三个系列:LSI Nytro WarpDrive加速卡、LSI Nytro XD 应用加速存储解决方案和LSI Nytro MegaRAID 应用加速卡。Nytro MegaRAID主要用于DAS环境,Nytro WarpDrive加速卡主要用于SAN和NAS环境,Nytro XD解决方案由Nytro WarpDrive加速卡和Nytro XD 智能高速缓存软件两部分构成。
LSI Syncro的定位主要用于数据共享,提高系统的可用性、可扩展性,降低成本。
LSI通过MegaRAID提供基本的可靠性保障;通过Nytro实现加速;通过Syncro突破容量瓶颈,让价格低廉的存储解决方案可以大规模扩展,并且进一步提高可靠性。5、RAID2:带海明码校验
从概念上讲,RAID 2 同RAID 3类似, 两者都是将数据条块化分布于不同的硬盘上, 条块单位为位或字节。然而RAID 2 使用一定的编码技术来提供错误检查及恢复。这种编码技术需要多个磁盘存放检查及恢复信息,使得RAID 2技术实施更复杂。因此,在商业环境中很少使用。下图左边的各个磁盘上是数据的各个位,由一个数据不同的位运算得到的海明校验码可以保存另一组磁盘上。由于海明码的特点,它可以在数据发生错误的情况下将错误校正,以保证输出的正确。它的数据传送速率相当高,如果希望达到比较理想的速度,那最好提高保存校验码ECC码的硬盘,对于控制器的设计来说,它又比RAID3,4或5要简单。没有免费的午餐,这里也一样,要利用海明码,必须要付出数据冗余的代价。输出数据的速率与驱动器组中速度最慢的相等。
6 、RAID3:带奇偶校验码的并行传送
这种校验码与RAID2不同,只能查错不能纠错。它访问数据时一次处理一个带区,这样可以提高读取和写入速度。校验码在写入数据时产生并保存在另一个磁盘上。需要实现时用户必须要有三个以上的驱动器,写入速率与读出速率都很高,因为校验位比较少,因此计算时间相对而言比较少。用软件实现RAID控制将是十分困难的,控制器的实现也不是很容易。它主要用于图形(包括动画)等要求吞吐率比较高的场合。不同于RAID 2,RAID 3使用单块磁盘存放奇偶校验信息。如果一块磁盘失效,奇偶盘及其他数据盘可以重新产生数据。 如果奇偶盘失效,则不影响数据使用。RAID 3对于大量的连续数据可提供很好的传输率,但对于随机数据,奇偶盘会成为写操作的瓶颈。
7、RAID4:带奇偶校验码的独立磁盘结构
RAID4和RAID3很象,不同的是,它对数据的访问是按数据块进行的,也就是按磁盘进行的,每次是一个盘。在图上可以这么看,RAID3是一次一横条,而RAID4一次一竖条。它的特点和RAID3也挺象,不过在失败恢复时,它的难度可要比RAID3大得多了,控制器的设计难度也要大许多,而且访问数据的效率不怎么好。
8、RAID5:分布式奇偶校验的独立磁盘结构
从它的示意图上可以看到,它的奇偶校验码存在于所有磁盘上,其中的p0代表第0带区的奇偶校验值,其它的意思也相同。RAID5的读出效率很高,写入效率一般,块式的集体访问效率不错。因为奇偶校验码在不同的磁盘上,所以提高了可靠性。但是它对数据传输的并行性解决不好,而且控制器的设计也相当困难。RAID 3 与RAID 5相比,重要的区别在于RAID 3每进行一次数据传输,需涉及到所有的阵列盘。而对于RAID 5来说,大部分数据传输只对一块磁盘操作,可进行并行操作。在RAID 5中有“写损失”,即每一次写操作,将产生四个实际的读/写操作,其中两次读旧的数据及奇偶信息,两次写新的数据及奇偶信息。
9、RAID6:带有两种分布存储的奇偶校验码的独立磁盘结构
名字很长,但是如果看到图,大家立刻会明白是为什么,请注意p0代表第0带区的奇偶校验值,而pA代表数据块A的奇偶校验值。它是对RAID5的扩展,主要是用于要求数据绝对不能出错的场合。当然了,由于引入了第二种奇偶校验值,所以需要N+2个磁盘,同时对控制器的设计变得十分复杂,写入速度也不好,用于计算奇偶校验值和验证数据正确性所花费的时间比较多,造成了不必须的负载。我想除了军队没有人用得起这种东西。
10、RAID7:优化的高速数据传送磁盘结构
RAID7所有的I/O传送均是同步进行的,可以分别控制,这样提高了系统的并行性,提高系统访问数据的速度;每个磁盘都带有高速缓冲存储器,实时操作系统可以使用任何实时操作芯片,达到不同实时系统的需要。允许使用SNMP协议进行管理和监视,可以对校验区指定独立的传送信道以提高效率。可以连接多台主机,因为加入高速缓冲存储器,当多用户访问系统时,访问时间几乎接近于0。由于采用并行结构,因此数据访问效率大大提高。需要注意的是它引入了一个高速缓冲存储器,这有利有弊,因为一旦系统断电,在高速缓冲存储器内的数据就会全部丢失,因此需要和UPS一起工作。当然了,这么快的东西,价格也非常昂贵。
11、RAID10:高可靠性与高效磁盘结构
这种结构无非是一个带区结构加一个镜象结构,因为两种结构各有优缺点,因此可以相互补充,达到既高效又高速的目的。大家可以结合两种结构的优点和缺点来理解这种新结构。这种新结构的价格高,可扩充性不好。主要用于数据容量不大,但要求速度和差错控制的数据库中。
12、RAID53:高效数据传送磁盘结构
越到后面的结构就是对前面结构的一种重复和再利用,这种结构就是RAID3和带区结构的统一,因此它速度比较快,也有容错功能。但价格十分高,不易于实现。这是因为所有的数据必须经过带区和按位存储两种方法,在考虑到效率的情况下,要求这些磁盘同步真是不容易。
RAID技术的应用
DAS--direct access storage device直接访问存储设备DAS是磁盘存储设备的术语,以前被用在大、中型机上。使用在PC机上还包括硬盘设备DAS的最新形式是RAID。“直接访问”指访问所有数据的时间是相同的。NAS--Network Attached Storage网络附加存储设备一种特殊目的的服务器,它具有嵌入式的软件系统,可以通过网络对个种的系统平台提供文件共享服务。SAN--Storage Area Networks存储区域网一种高速的专用网络,用于建立服务器、磁盘阵列和磁带库之间的一种直接联接。它如同扩展的存储器总线,将专用的集线器、交换器以及网关或桥路互相连接在一起。SAN常使用光纤通道。一个SAN可以是本地的或者是远程的,也可以是共享的或者是专用的。SAN打破了存储器与服务器之间的束缚,允许独立地选择最佳的存储器或者是最佳的服务器,从而提高可扩性和灵活性。
混合RAID混合RAID是一种冗余存储解决方案,采用高容量低成本的SATA或者高性能SAS硬盘与低延迟高IOPs的固态盘,再加上SSD感知的RAID控制卡。
在混合RAID中,读取操作在更高速的SSD中进行,而出于冗余考虑,写入操作则在SSD和HDD中进行。混合RAID适合于数据等级较低的应用,例如互联网网关、文件服务器或者虚拟机
[3] 混合RAID 的好处是什么?
混合RAID阵列的性能远远超过标准HDD RAID阵列,而且成本比纯SSD RAID阵列更低。相比纯HDD RAID阵列,混合阵列加速IOPS并降低延迟,使数据中心和云计算环境能够托管更多用户,每秒钟在每台服务器上执行更多交易,减少了支持任何特定工作负载所需的服务器数量。除了服务器数量缩减会减少数据中心服务器的占地空间之外,在财务上体现出的好处就是降低了采购额外服务器所需的资本开支,以及供电、冷却与维护相关的运营开支。
混合RAID解决方案
从硬件的角度看,搭建一个混合RAID解决方案可以使用任何容量的SSD和HDD(不过SSD和HDD的数量必须相同)。如果这个RAID阵列使用容量不同的驱动器,那么驱动器容量就是更小的那个。例如, 一个RAID 1 使用1个128GB SSD和2TB HDD,那么逻辑设备就是128GB。一个RAID 10使用2个128GB SSD和2个2TB HDD,逻辑设备就是256GB。剩下的HDD容量可用于存储。
不过,从应用的角度看,因为大多数软件并不能识别出采用两种有着不同特点的存储的可能性。为了充分利用混合RAID,必须部署一种具有智能存储处理能力、SSD感知的RAID控制卡。Adaptec 6系列、5Z系列、5系列、2系列和Q系列控制卡经过最新的固件升级之后, 可以很好地利用剩余容量,自动创建一个混合RAID阵列,将1个或者多个SSD与相同数量的HDD做成RAID 1或者RAID 10阵列。这个混合RAID阵列对于操作系统和所有运行中的应用都是透明的。此外,Adaptec控制卡通过向HDD和SSD的写入、100%从SSD读取,提供了最高的混合阵列性能(见右图Adaptec混合RAID解决方案)。
Adaptec混合RAID阵列提供了比标准HDD阵列更高的IOPs性能,同时写I/O性能也没有降级,见下图-IOMeter原始性能。
一些应用甚至看到了通过Adaptec混合RAID获得的少量性能优势,并且混合RAID 1速度比单个SSD更快,见下图-AS SSD应用性能。
软 RAID 和硬 RAID 各有什么优劣?
Raid 1+0 软硬raid 差别不大,甚至硬raid控制器的吞吐量不如x86的系统,从而吞吐量会比不上软Raid。
Raid 5,6则是硬raid完胜。why?
(当然这个前提不包括Solaris ZFS文件系统,以及使用Linux 3.09之后的内核的相关系统)
简单通过Raid5来进行比较。Raid 5基本原理是异或运算来实现。
XOR (0, 1) = 1
XOR (1, 0) = 1
XOR (0, 0) = 0
XOR (1, 1) = 0
硬盘1 硬盘2 硬盘3
| 101 | 010 | 011 |
XOR (101, 010, 011) = 100
过程如下:
XOR (101,010) = 111 , XOR (111, 011) = 100
校验盘P
| 101 | 010 | 011 | 100 |
| 101 | 挂了 | 011 | 100 |
还原010
XOR (101, 011, 100) = 010
当然实际过程比这个要复杂的多的多。
Raid 5读写数据流程是,读写也是基于Raid stripe size, 相当于是一个数据快是Raid最小基础单元。像人体细胞一样。
Raid5 写一份数据,需要下列操作,普通硬盘只要1次写操作。
控制器读取旧的数据块,
读取旧的校验块。
并和新计算出来的进行比对,如果有修改,则要改写旧块为新块(数据快和校验块)。
如果只是同等内容修改,没有用到新的块。就到此为止了。
简单的例子是,我新建一个文本文档,只有一个字符A,没有空格,空行,tab。我修改A为B,然后保存,文件大小是不变的。如果我把A改成两个字母“AB”,再保存。相当于申请新的空间来保存另外一个字符B。(此例子只能用来理解,不能代表100%Raid控制器和文件系统是这样存储数据)
如果有追加的数据
则还要写入新的数据块和新的校验块。这一段参考wiki,但是它没有写出追加和修改的区别,我这里写出来了。
所谓硬件Raid控制器也是一套私有系统,自己的CPU,内存,以及存储数据的单元。只是很小,根据LSI的文档,同一代高中低端的芯片也是这样划分的。根据CPU,内存频率,当然也有软件算法升级和以及某些功能license。其实和intel,nvidia没啥区别。
注意cache的速度比硬盘快很多。100倍或更多。当然和硬件有关。
硬件raid控制器优势,有电池或者SLC的SSD来对cache进行保护。(不清楚有没有无良厂商使用MLC的),相当于给你的台式机内存加装电池,或者类似win7的关机休眠功能,关机后,内存仍可以得到供电。重新开机后,打开的程序都还在。所以有了电池或者SSD作为cahce,所以硬件raid控制器可以把上述Raid5频繁读写操作往cache里面塞,主要针对读写量不连续磁盘块的写操作和以及校验操作,如果够大的话,会预读一部分校验数据到缓存里面。顺序读写磁盘速度是可以接受的(相对来说,极少磁盘额外寻道时间)。所以,我写10次校验数据不连续的写操作,可能都是写到带电池的高速缓存中,同样连续的写操作,cache会保存校验数据,但是个人觉得连续写操作不经过cache效率会更高。
同样,软raid,控制调度是OS内核,Xeon E5 E7怎么都比Power 800要牛B的多吧,注意注意,高速cache不是内存哦。因为你的服务器内存木有电池哦,所以软Raid则会使用同步IO操作(带fsync, O_SYNC标志的操作)。结果就是相当于没有内存,因为每次要等磁盘确认响应,相当于你把你的硬Raid控制器调整为write through模式。相当于你的Raid没有那块高速cache。
于是,校验写一次,虽然经过内存,但是kernel要求要求软raid驱动给一个数据写入的确认,软raid驱动会把这个请求仍给硬盘,要求我(软raid驱动)刚才写入1,2,3,4号盘的数据是不是都写入了。如果写入了给一个确认。它会等到最后才执行完的那块硬盘给出确认后,再回复kernel,啊,数据写完了。
废话这么多,硬件raid可以在高速缓存中合并非连续写和校验写为连续的写操作。
软件raid则要确认每一次数据和校验写是否都写入到磁盘上去了,还要额外附加一些读操作,7200或者15000的磁头要转啊转,延时啊。
所以软Raid用来做Raid 1+0 或者Raid 1是和硬件Raid没有太多区别,可能性能会更好。
但是用来做有校验的Raid 4,5,6. 则会导致写性能瓶颈。
当然如果你做Raid4,校验盘用一块同容量SSD来替代,也是不错的。哈哈。
在来一个例子理解,比如软raid要出差,目前在帝都北京,但是明天要去武汉,后天又要回北京,最后还要去深圳,去完了还要返回北京,客户都约好了,不能改时间。
但是硬raid比较灵活,提前和客户排好了班,先去深圳,再去武汉,最后回北京。
虽然OS自己有自己的IO调度队列,但是被fsync,O_SYNC这种同步IO标志限制了,没办法必须写到此盘,因为没有带电池的内存。(不带电存储的高速cache)
但是Linux 3.09之后,情况不是这样了,3.09引入dm-cache,3.10引入bcache
简单而言,就是可以使用一个block device块设备,作为另一个块设备的write back cache。
也就是说,我用一块高速SSD + 若干的硬盘做软raid,也有高速写cache了。
硬件raid慢慢要失去优势了。后续我也看好btrfs加入raid5,6的支持,当然在没有raid7,8出现的情况下。
之前还提到了Sun的存储,Sun有一个系列Sun ZFS Storage
为什么Sun的SAN存储都是软Raid + SSD,就可以实现和硬Raid匹敌的速度呢?
因为ZFS里面或者说Solaris内核里面,早就实现了linux 3.10的bcache的功能。
所以SUN真是先驱者。确认了用更廉价的硬件是可以搭建出和硬件raid匹敌的硬件。
本人非硬件驱动,电子电路工程师,少部分只是看程序YY的答案,回答难免有误。
欢迎大婶指正。


什么是raid 磁盘冗余阵列 这是由多块独立磁盘(多为硬盘)组合的一个超大容量磁盘组。 大白话的解释磁盘冗余阵列,就是将很多块硬盘组合成一个整体,不...

RAID(Redundant Array of Independent Disks)即独立磁盘冗余阵列,RAID技术将多个单独的物理硬盘以不同的方式组合...

RAID 5 是一种存储性能、数据安全和存储成本兼顾的存储解决方案。RAID 5可以理解为是RAID 0和RAID 1的折中方案。
RAID(Redundant Array of Independent Disks,独立磁盘冗余阵列)是一种将多个硬盘驱动器组合成一个逻辑单元的数据存储...

简单易用的ICY DOCK硬RAID硬盘盒 RAID常见问题教程
RAID(RedundantArrayofIndependentDisks,独立磁盘冗余阵列)是服务器存储中常用的一种技术,它通过组合多个物理硬盘来提高...
服务器数据恢复—从数据恢复的角度讨论RAID磁盘阵列的存储安全问题
出于尽可能避免数据灾难的设计初衷,RAID解决了3个问题:容量问题、IO性能问题、存储安全(冗余)问题。从数据恢复的角度讨论RAID的存储安全问题。

显示屏上出现press to Run Configuration Utility界面,按CTRL+R,如果没有此界面,按F2进入系统设置,将Boot M...
PC机CPU需要支持64位硬件虚拟化;PC机主板支持RAID模式需要在BIOS中开启RAID模式,但不用配置RAID,ESXI不支持主板集成的软RAID模式。
服务器数据恢复—XenServer中VPS不可用的数据恢复案例
服务器数据恢复环境: 某品牌720服务器搭配该品牌某型号RAID卡,使用4块STAT硬盘组建了一组RAID10阵列。服务器上部署XenServer虚拟...

计算机存储主要分为四类:一级存储:与 CPU 直接连通,CPU 会不断读取存储在这里的指令集,并在需要时运行这些指令集。

Neousys宸曜发布强固型安防监控AI平台支持PoE+和RAID
强固型嵌入式计算平台厂商Neousys宸曜科技发布了一款紧凑型无风扇嵌入式计算平台POC-764VR,专为各类监控场景而设计,如视频分析和目标检测。PO...
近日,国芯科技宣布,其自主研发的RAID芯片CCRD3316系列中的新成员——IO处理芯片CCRD3304,已成功导入某头部通信设备厂商的移动通信基站项...
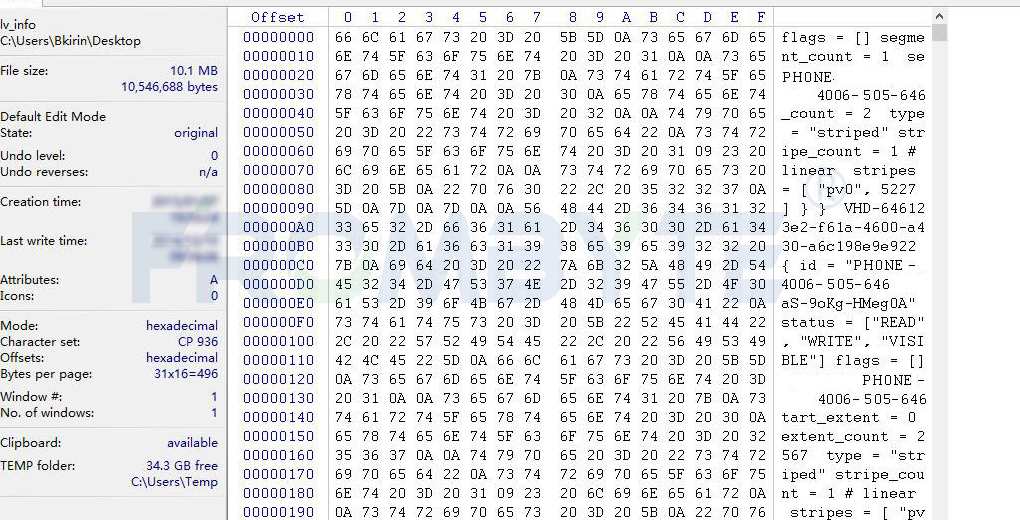
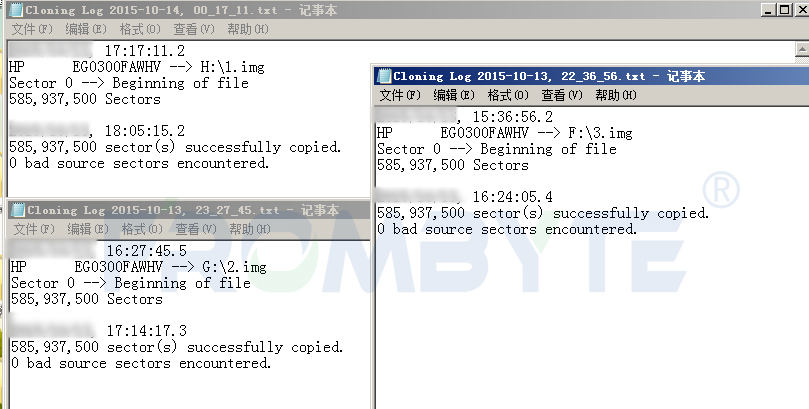
服务器存储数据恢复环境: ZFS Storage 7320存储阵列中有32块硬盘。32块硬盘分为4组,每组8块硬盘,共组建了3组RAIDZ,每组rai...

近日,国芯科技(股票代码:688262)基于自主研发的RAID芯片CCRD3316新研发的IO处理芯片CCRD3304成功导入到某头部通信设备厂商的移动...
RAID(Redundant Array of Independent Disks,独立磁盘冗余阵列)在大数据分析中的应用主要体现在提高存储系统的性能、...
在现代数据中心和企业级存储解决方案中,RAID技术扮演着至关重要的角色。它通过将多个物理磁盘组合成一个逻辑单元,提供了数据冗余、性能提升和容错能力。RA...
在现代数据存储领域,RAID技术已经成为提高数据可靠性、可用性和性能的关键技术之一。RAID通过将多个物理磁盘组合成一个逻辑单元,提供了数据冗余和性能优...
在现代数据管理中,数据保护是至关重要的一环。RAID和备份是两种常见的数据保护技术,它们各自有着独特的优势和应用场景。 一、RAID的基本概念和优势 R...
RAID(Redundant Array of Independent Disks,独立磁盘冗余阵列)是一种将多个硬盘驱动器组合成一个逻辑单元的数据存储...
服务器数据恢复—raid磁盘亮红色,分区无法识别的数据恢复案例
存储中有一组由3块SAS硬盘组建的raid。上层win server操作系统层面划分了3个分区,数据库存放在D分区,备份存放在E分区。 RAID中一块...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

