完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > STC

 厂商产品
+关注
0人关注
厂商产品
+关注
0人关注
STC是单片机是一款基于8位单片机处理芯片STC89C51RC的系统。本章详细介绍了stc单片机原理及应用,单片机晶振频率,stc12c5a60s2,stc系列单片机简介,stc芯片解密,stc单片机教程,stc单片机官网,stc型号,stc单片机编程器
STC是单片机是一款基于8位单片机处理芯片STC89C51RC的系统。
原理
STC89C51RC是采用8051核的ISP(In System Programming)在系统可编程芯片,最高工作时钟频率为80MHz,片内含4K Bytes的可反复擦写1000次的Flash只读程序存储器,器件兼容标准MCS-51指令系统及80C51引脚结构,芯片内集成了通用8位中央处理器和ISP Flash存储单元,具有在系统可编程(ISP)特性,配合PC端的控制程序即可将用户的程序代码下载进单片机内部,省去了购买通用编程器,而且速度更快。STC89C51RC系列单片机是单时钟/机器周期(1T)的兼容8051 内核单片机,是高速/ 低功耗的新一代8051 单片机,全新的流水线/精简指令集结构,内部集成MAX810 专用复位电路。
STC是单片机是一款基于8位单片机处理芯片STC89C51RC的系统。
原理
STC89C51RC是采用8051核的ISP(In System Programming)在系统可编程芯片,最高工作时钟频率为80MHz,片内含4K Bytes的可反复擦写1000次的Flash只读程序存储器,器件兼容标准MCS-51指令系统及80C51引脚结构,芯片内集成了通用8位中央处理器和ISP Flash存储单元,具有在系统可编程(ISP)特性,配合PC端的控制程序即可将用户的程序代码下载进单片机内部,省去了购买通用编程器,而且速度更快。STC89C51RC系列单片机是单时钟/机器周期(1T)的兼容8051 内核单片机,是高速/ 低功耗的新一代8051 单片机,全新的流水线/精简指令集结构,内部集成MAX810 专用复位电路。
stc单片机和51单片机有什么大的区别
就和华为荣耀手机与智能手机之间的区别似得,根本没法比较,STC是深圳宏晶公司产的单片机的名称前缀,就像华为的荣耀手机名称一样,51是单片机的种类,就像手机里的智能手机,老人机似得,属于种类,这有的比么。
STC单片机STC单片机是以51内核为主的系列单片机,STC单片机是宏晶生产的单时钟/机器周期的单片机,是高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8—12倍,内部集成MAX810专用复位电路。4路PWM 8路高速10位A、D转换,针对电机控制,强干扰场合。
STC单片机主要性能
●高速:1 个时钟/ 机器周期,增强型8051 内核,速度比普通8051 快8~12 倍
●宽电压:5.5~3.8V,2.4~3.8V(STC12LE5410AD 系列)
●低功耗设计:空闲模式,掉电模式(可由外部中断唤醒)
●工作频率:0~35MHz,相当于普通8051:0~420MHz
--- 实际可到48MHz,相当于8051: 0~576MHz
●时钟:外部晶体或内部RC 振荡器可选,在ISP 下载编程用户程序时设置
● 12K/10K/8K/6K/4K/2K 字节片内Flash 程序存储器,擦写次数10 万次以上
● 512 字节片内RAM 数据存储器
●芯片内EEPROM 功能
● ISP / IAP,在系统可编程/ 在应用可编程,无需编程器/ 仿真器
● 10 位ADC,8 通道,STC12C2052AD 系列为8 位ADC。4 路PWM 还可当4 路D/A 使用
● 4 通道捕获/ 比较单元(PWM/PCA/CCU),STC12C2052AD 系列为2 通道
--- 也可用来再实现4 个定时器或4 个外部中断(支持上升沿/ 下降沿中断)
● 2 个硬件16 位定时器,兼容普通8051 的定时器。4 路PCA 还可再实现4 个定时器
●硬件看门狗(WDT)
●高速SPI 通信端口
●全双工异步串行口(UART),兼容普通8051 的串口
●先进的指令集结构,兼容普通8051指令集
4 组8 个8 位通用工作寄存器(共32 个通用寄存器)
有硬件乘法/ 除法指令
●通用I/O 口(27/23/15 个),复位后为: 准双向口/ 弱上拉(普通8051 传统I/O 口)
可设置成四种模式:准双向口/ 弱上拉,推挽/ 强上拉,仅为输入/ 高阻,开漏每个I/O 口驱动能力均可达到20mA,但整个芯片最大不得超过55mA
2STC单片机特点 1 、I / O 口经过特殊处理
2 、轻松过2KV/4KV 快速脉冲干扰(EFT 测试)
3 、宽电压, 不怕电源抖动
4 、宽温度范围, - 4 0 ℃~8 5 ℃
5 、高抗静电(E S D 保护)
6 、单片机内部的时钟电路经过特殊处理
7 、单片机内部的电源供电系统经过特殊处理
8 、单片机内部的看门狗电路经过特殊处理
9 、单片机内部的复位电路经过特殊处理
3STC单片机AD和EEPROM的驱动C程序 STC单片机具有在应用编程,调试起来比较方便;带有10位AD;内部eeprom;可在1T/机器周期下工作,速度是传统51单片机的12倍;下面是我写的AD和EEPROM的驱动C代码:
/*----------------------------------------------------------------
*File Name: stc_AD.c -
*Description: A/D 转换程序
*Project: -
*MCU type: STC12C5410AD -
-
*Company: WY -
*Compiler: KEIL C51 -
*DESINER: 郭准 06.2.7 -
-----------------------------------------------------------------------*/
#include 《global.h》 //定义的 系统头文件和全局变量
/*A/D SFR*/
sfr ADC_LOW2 = 0xBE;
sfr ADC_CONTR = 0xC5;
sfr ADC_DATA = 0xC6;
sfr CLK_DIV = 0xC7; ////////
//定义变量
uchar CODe display_AD_channel_ID[2] = {0x00,0x01};
uchar data AD_channel_result[2][5]; //各通道A/D转换结果。前是通道号;后是转换的值
//定义引用外部
extern void Delay(uint number);//晶振=11059200,机器周期=1.085069444us,“加”的机器周期=1
extern void send_char_com(uchar ch);
extern void send_string_com(uchar *str,uchar strlen);
void Ad_Change(uchar channel);
//------------------------------------------------------
//功能:A/D转换
//入口:channel = 通道号 .0:0通道;1:1通道。。。。。。。
//出口:AD_channel_1_result: 10位的数据,16进制。
//设计:郭准,伟业,2006/2/7
//------------------------------------------------------
void Ad_Change(uchar channel)
{
uint AD_Result_Temp = 0 ;
//---------------------将P1.0--P1.1设置成适合AD转换的模式
/// P1 = 0xff; //将P1口置高,为A/D转换作准备
ADC_CONTR = ADC_CONTR|0x80; //1000,0000打开A/D转换电源
P1M0 = 0x03; //0000,0011用于A/D转换的P1.x口,先设为开漏
P1M1 = 0x03; //0000,0011P1.0--P1.1先设为开漏。断开内部上拉电阻
Delay(20); //20
ADC_CONTR = ADC_CONTR&0xE0; //1110,0000 清ADC_FLAG,ADC_START位和低3位
ADC_CONTR = ADC_CONTR|(display_AD_channel_ID[channel]&0x07); //设置当前通道号
Delay(1); //延时使输入电压达到稳定
ADC_DATA = 0; //清A/D转换结果寄存器
ADC_LOW2 = 0;
ADC_CONTR = ADC_CONTR|0x08; //0000,1000ADCS = 1,启动转换
do { ; }
while((ADC_CONTR & 0x10)==0); //0001,0000等待A/D转换结束
ADC_CONTR = ADC_CONTR&0xE7; //1110,0111清ADC_FLAG位,停止A/D转换
AD_Result_Temp = ((AD_Result_Temp|ADC_DATA)《《2)|(ADC_LOW2&0x03);
//保存返回AD转换的 结果
//----------------------------转换成可由串口显示的字符
AD_channel_result[channel][0] = AD_Result_Temp/1000+0x30;
AD_channel_result[channel][1] = (AD_Result_Temp%1000)/100+0x30;
AD_channel_result[channel][2] = (AD_Result_Temp%100)/10+0x30;
AD_channel_result[channel][3] = AD_Result_Temp%10+0x30;
//------------------------串口监视
// send_char_com(ADC_DATA); //////发送转换 的 到的 值,这里只是 高8位,值的转换需要考虑
// send_char_com(ADC_LOW2); //////发送转换 的 到的 值,这里只是 低2位,值的转换需要考虑
send_string_com(AD_channel_result[channel],4);
Delay(1); //
}
/*----------------------------------------------------------------
*File Name: STC_EEPROM.c -
*Description: IAP/ISP 功能 -
*Project: -
*MCU type: STC12C5410AD -
-
*Company: WY -
*Compiler: KEIL C51 -
*DESINER: 郭准 06.2.7 -
-----------------------------------------------------------------------*/
#include 《global.h》 //定义的 系统头文件和全局变量
/*IAP有关功能寄存器*/
sfr ISP_DATA = 0xE2;
sfr ISP_ADDRH = 0xE3;
sfr ISP_ADDRL = 0xE4;
sfr ISP_CMD = 0xE5;
sfr ISP_TRIG = 0xE6;
sfr ISP_CONTR = 0xE7;
//----------------------------定义常量
#define ENABLE_ISP 0x82 //《20MHz
//#define ENABLE_ISP 0x83 //《12MHz
#define DEBUG_DATA 0x5A
//----------------------------flash 存储的起始地址
#define DATA_FLASH_START_ADDRESS 0x2800 //stc12c2052ad ////////////???????????
uchar tx_buf[3] = {0,0,0};
extern void Delay(uint number);//晶振=11059200,机器周期=1.085069444us,“加”的机器周期=1
extern void send_char_com(uchar ch);
extern void send_string_com(uchar *str,uchar strlen);
uchar Byte_Read(uint address);
void Sector_Erase(uint address);
void Byte_Program(uint address,uchar ch);
/*
void Eeprom_Start(void)
{
P1 = 0xf0; //开始工作
Delay(2); //22us.。原13us
// SP = 0xE0; //堆栈指针指向0E0H单元
}
*/
//------------------------------------------------------
//功能:读一字节;调用前需打开IAP功能
//入口:uint address=页地址0~512,为了提高处理速度,最好用0~256的范围
//出口:
//设计:郭准,伟业,2006/2/7
//------------------------------------------------------
uchar Byte_Read(uint address)
{
uchar data ch;
ISP_CONTR = ENABLE_ISP; //打开IAP功能,设置Flash操作等待时间
ISP_CMD = 0x01; //选择读AP模式
//--------------------------
address = DATA_FLASH_START_ADDRESS+address;
ISP_ADDRH = (uchar)(address》》8); //填页地址
ISP_ADDRL = (uchar)(address); //填页地址
EA = 0;
ISP_TRIG = 0x46; //出发ISP处理器
ISP_TRIG = 0xB9;
nop();
ch = ISP_DATA; //保存数据
EA = 1;
//------------------------在处理器完成之前,CUP将暂停
//------------------------关闭IAP功能,清与ISP有关的特殊功能寄存器
ISP_CONTR = 0;
ISP_CMD = 0;
ISP_TRIG = 0;
// send_char_com(ch + 0x30);
return ch;
}
//------------------------------------------------------
//功能:擦除扇区
//入口:uint address=页地址0~512,为了提高处理速度,最好用0~256的范围
//出口:
//设计:郭准,伟业,2006/2/7
//------------------------------------------------------
void Sector_Erase(uint address)
{
ISP_CONTR = ENABLE_ISP; //打开IAP功能,设置Flash操作等待时间
ISP_CMD = 0x03; //选择页擦除模式
//--------------------------
address = DATA_FLASH_START_ADDRESS+address;
ISP_ADDRH = (uchar)(address》》8); //填页地址
ISP_ADDRL = (uchar)(address); //填页地址
EA = 0;
ISP_TRIG = 0x46; //出发ISP处理器
ISP_TRIG = 0xB9;
nop();
EA = 1;
//------------------------关闭IAP功能,清与ISP有关的特殊功能寄存器
ISP_CONTR = 0;
ISP_CMD = 0;
ISP_TRIG = 0;
}
//------------------------------------------------------
//功能:字节编程,写
//入口:uint address=页地址0~512,为了提高处理速度,
// 最好用0~256的范围;uchar ch=要写的数据
//出口:
//设计:郭准,伟业,2006/2/7
//------------------------------------------------------
void Byte_Program(uint address,uchar ch)
{
// Sector_Erase(address);
ISP_CONTR = ENABLE_ISP; //打开IAP功能,设置Flash操作等待时间
ISP_CMD = 0x02; //选择字节编程模式
//--------------------------
address = DATA_FLASH_START_ADDRESS+address;
ISP_ADDRH = (uchar)(address》》8); //填页地址
ISP_ADDRL = (uchar)(address); //填页地址
ISP_DATA = ch;
EA = 0;
ISP_TRIG = 0x46; //出发ISP处理器
ISP_TRIG = 0xB9;
nop();
EA = 1;
//------------------------关闭IAP功能,清与ISP有关的特殊功能寄存器
ISP_CONTR = 0;
ISP_CMD = 0;
ISP_TRIG = 0;
}
//------------------------------------------------------
//功能:字节编程,写字符串
//入口:uint address=页地址0~512,为了提高处理速度,
// 最好用0~256的范围;uchar ch=要写的数据
// len=字符串的长度
//出口:
//设计:郭准,伟业,2006/2/7
//------------------------------------------------------
void Morebyte_Program(uint address,uchar *ch,uchar len)
{
uchar k = 0;
Sector_Erase(address);
do
{
Byte_Program(address,*(ch + k));
address++;
k++;
}
while(k 《 len);
}
//------------------------------------------------------
//功能:读多字节;调用前需打开IAP功能
//入口:uint address=页地址0~512,为了提高处理速度,最好用0~256的范围
//出口:
//设计:郭准,伟业,2006/2/7
//------------------------------------------------------
void Moreyte_Read(uint address)
{
uchar k = 0;
do
{
tx_buf[k] = Byte_Read(address);
address++;
k++;
}
while(k 《 3);
}
4基于STC单片机的经济型步进电机控制系统 步进电机是工业控制中应用十分广泛的一种电动机,它能将数字信号直接转换成角位移或线位移,驱动速度和指令脉冲能严格同步,具有较高的定位精度,控制系统成本低廉,在经济型数控机床等领域应用广泛。这里针对电磁干扰较强以及要求低成本应用的场合,采用超强抗干扰、小巧低功耗的工业级STC12C系列单片机,充分利用单片机内部的硬件资源,设计实用的步进电机控制和驱动系统。
1 控制系统总体方案设计
系统功能原理示意图如图1所示。
在该系统中由单片机直接输出电机的各相控制脉冲序列,光耦进行必要的光电隔离,采用分立元件构成功率.MOSFET管驱动电路,带动电机转动。键盘接口与 LED显示功能由具有SPI串行接口功能的ZLG7289实现。既可使用按键输入的方式精确设置电机的工作方式与转速,也可以通过调速旋钮实现电机转速的连续调节,还能通过上位机实现对电机工作方式的调整与控制。
2 硬件电路设计
2.1 控制电路设计
控制芯片采用STC12C4052AD,它是1个时钟/机器周期的单片机,速度比普通的8051单片机快8~12倍,有20个引脚且为小巧封装。该单片机具有超强抗干扰,抗静电的特点,能轻松通过4 kV快速脉冲干扰,其功耗超低,正常工作模式下的典型功耗为2.7~7 mA。芯片自带硬件看门狗,具有高速SPI通信端口,8通道8位A/D转换,2路PWM输出,4 KB容量的FLASH存储器,256 B容量的SRAM,4个定时器,1个全双工串行通信口。由于单片机内部的资源丰富,性价比高,能够满足该设计的要求,而且减少了硬件电路的设计,提高了工作效率。单片机的外部引脚定义,及其在该设计中的资源分布如图2所示。
P1.4(ADC4)口外接4.7 kΩ的可调电位器,利用单片机内部的模/数转换功能转换成数字量,进而控制输出脉冲频率,完成步进电机速度的“连续”调节。过流检测的结果直接引入到外部中断0,实现对电流的快速控制。
2.2 驱动电路设计
功率MOSFET管的部分驱动电路如图3所示。该电路的设计可改进功率MOSFET管的快速开通时间,提高了驱动电流的前后沿陡度,能够改善高频响应。功率MOSFET管栅源间的阻抗很高,工作于开关状态下漏源间电压的突变会通过极间电容耦合到栅极,产生相当幅度的VGS脉冲电压。正方向的VGS脉冲电压可能会导致器件的误导通。为此,需要适当降低栅极驱动电路的阻抗,在栅源之间并接阻尼电阻或接一个稳压值小于20 V,而又接近20 V的齐纳二极管,以防止栅源开路工作。
为了抑制功率管内的快恢复,二极管出现反向恢复效应,在电路中接入4只快恢复二极管。其中,反并联快恢复二极管的作用是为电机相绕组提供续流通路,其余2 只是为了使功率MOSFET管内部的快恢复二极管不流过反向电流,以保证功率MOSFET管在动态工作时能起到正常的开关的作用。
2.3 显示与按键处理电路
在单片机应用系统中,典型的键盘显示接口电路由基于并行扩展技术的8155,8279构成控制电路。现代单片机应用系统广泛采用串行扩展技术。相对于并行方式,串行扩展接线灵活,占用单片机资源少。
ZLG7289A是具有SPI串行接口功能的可同时驱动8位数码管或64只独立LED的智能显示驱动芯片,单片即可完成显示、键盘接口的全部功能。采用串行方式与微处理器通信,数据从DIO引脚送入芯片,并由CLK端同步。当选信号变为低电平后,DIO引脚上的数据在CLK引脚的上升沿被写入 ZLG7289A的缓冲寄存器。图4是ZLG7289的典型应用。ZLG7289A连接共阴式数码管,应用中不需要的数码管与键盘可以不连接,省去数码管或对数码管设置消隐属性,这均不会影响键盘的使用。整个电路无需添加锁存器和驱动器,耗电少,软件设计中无需编写显示译码程序,省去了静态显示扩展芯片,大大节省了CPU的时间。该电路设计中仅采用4×4键盘和4位数码管,已完全满足设计需要。
3 软件设计
软件部分采用模块化结构设计。对步进电机转速的控制是通过定时器工作在中断方式实现的。定时器定时中断产生周期性脉冲序列,不是采用软件延时的方式,这样不占用CPU的时间。CPU在非中断时间内可以处理其他事件,只有在中断发生时才驱动步进电机转动一步。根据步进电机励磁状态转换,采用查表法求出所需的输出状态,并以二进制码的形式依次存入单片机内部的存储器中;然后按照正向或反向顺序依次取出地址的状态字,送给STC12C4052AD,输出各励磁状态,从而实现环形分配器的功能。
程序总体框架包括:主程序、过流检测中断服务子程序、定时器中断服务子程序、以及其他子程序(包括正转、反转子程序、键盘显示控制子程序、A/D转换子程序等),由于篇幅限制,在此不一一叙述。
4 系统测试
该系统采用超强抗干扰,小巧低功耗的工业级STC12C4052AD单片机为控制核心,工作可靠性高,抗于扰能力强。系统测试在专门的检测实验室内进行。利用群脉冲发生器(EFT-4001)、周波电压跌落发生器(VDG-1105)、静电放电发生器(ESD-20)以及雷击浪涌发生器(SG-5006) 等专用仪器对系统的电压变化抗扰度、快速瞬变脉冲群抗扰度、抗静电和雷击浪涌等参数进行检测。经过实验,系统功能正常,所有参数均已达标。
5 结 语
电子技术发展日新月异,新型单片机层出不穷。在电机控制系统开发过程中,如果恰当选取单片机以及各电路模块的型号,能够简化设计过程,起到事半功倍的效果。该系统采用STC12C4052AD单片机,其工作方式、转动速率及转矩数可以通过键盘输入,也可通过普通旋钮或上位机调节。键盘显示模块采用 ZLG7289实现。本系统具有通用性,适当改变输出口各位控制端,便可控制不同相数的步进电机。

STM8是意法半导体(STMicroelectronics)公司推出的一款8位单片机,而STC是中国STC公司推出的一系列8位单片机产品。尽管两者都是8...

寻找一家真正可以解密的商家很难很难,因为设备的投入很大很大,几百几千万,他们可能没有那么多时间和金钱去做大量的广告,但是他们技术真的很牛,他们可以保证您...

LDL和STC指令可用于获取原子读-写操作,用于多核系统对内存更新进行精确处理。LDL和STC指令的操作方式如下。
本节介绍用简单的方式,让步进电机转起来。其目的之一是对电机转动有直观的感受,二是熟悉整个开发流程
进入雷达接收机的信号除了有用的目标回波,还会有杂波和干扰。接收机在尽量扩大线性动态(动态范围)的同时,通常会用灵敏度时间控制电路(STC)和自动增益控制...
数据线从高电平拉至低电平,产生写起始信号。15us之内将所需写的位送到数据线上, 在15~60us之间对数据线进行采样,如果是高电平就写1,低写0发生。
在我们设计单片机电路的时候,单片机的 IO 口数量是有限的,有时并满足不了我们的设计需求,比如我们的 STC89C52 一共有 32 个 IO 口,但是...
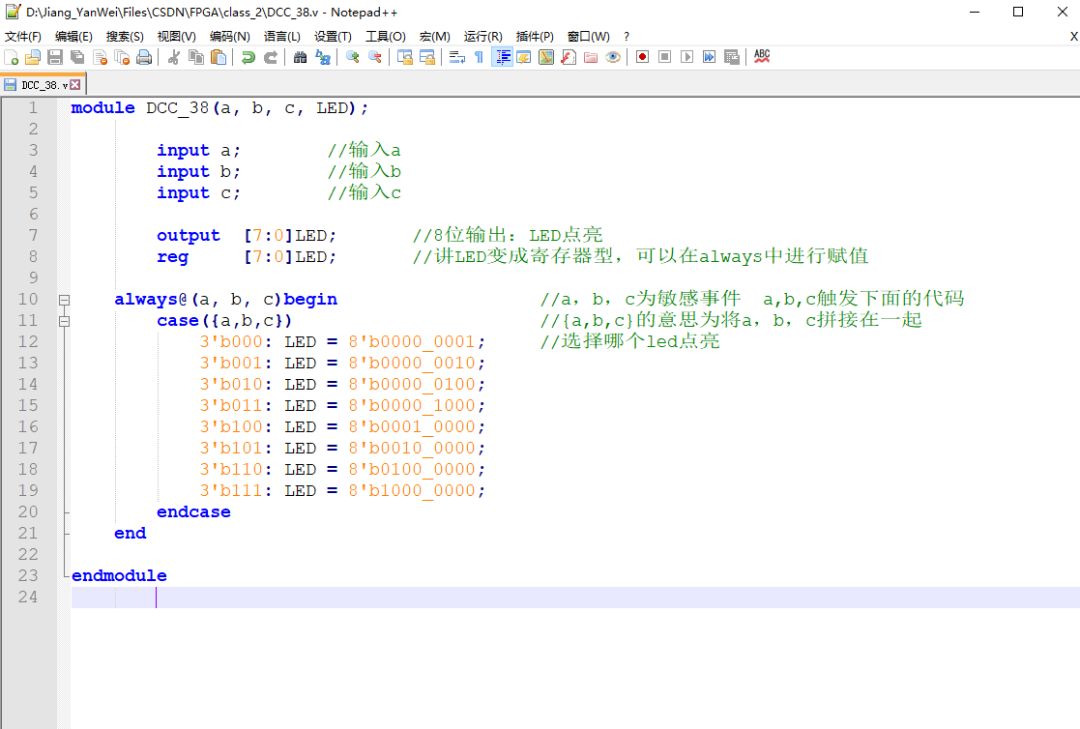
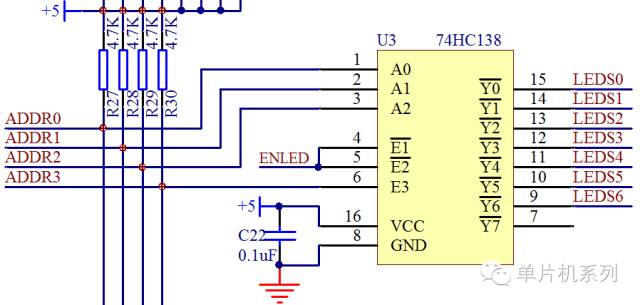
一听到三八译码器这个东西可能会感觉有点熟悉,其实在STC89C51系列单片机中,里面就有一个三八译码器,就是一开始的流水灯程序,LED0-7这八个LED...
讨论了重要的功能和参数差异,使电子设计人员能够概述和理解硅延迟块技术,以简化与需要或已经使用延迟块技术的新设计和现有设计的集成。
对于大多数电子爱好者来说,单片机程序烧写并不陌生,对于STC这个品牌也很熟悉。本文要介绍的是STC系列单片机不断电和远程烧写技巧。烧写程序一般是使用PC...
单片机现在可谓是铺天盖地,种类繁多,让开发者们应接不暇,发展也是相当的迅速,从上世纪80年代,由当时的4位8位发展到现在的各种高速单片机。 各个厂商们也...
对于很多初学者来说,刚开始接触51单片机时可能是使用proteus等仿真软件进行仿真学习的,在建立keil工程时也是选用课本上对应的51单片机型号进行编程。

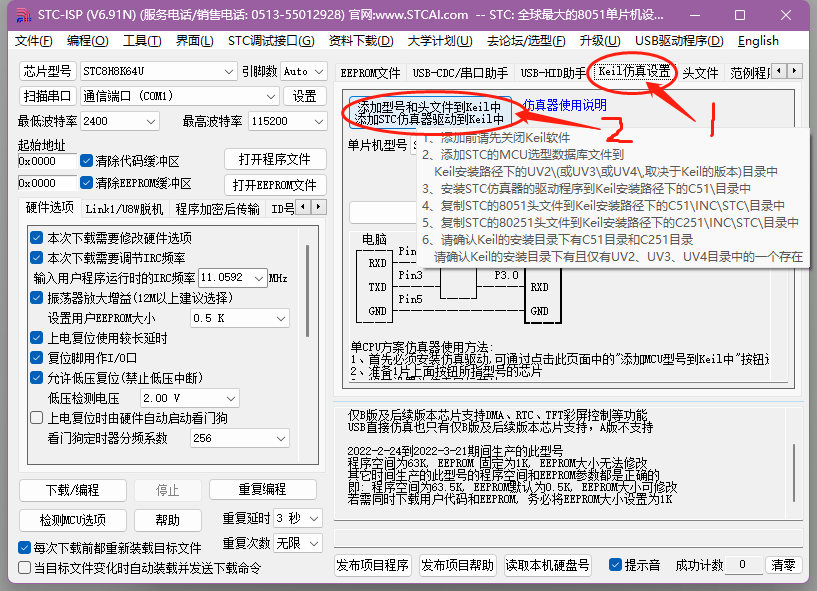
来源 | TsinghuaJoking STC单片机的程序下载使用ISP模式,下载程序通过微机上串口,或者USB转串口,与单片机上特定的下载端口相连进行...
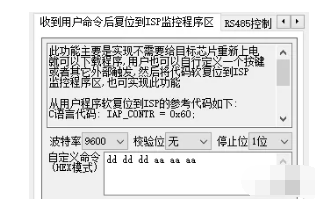
本电路是借鉴stc官方离线烧写器原理图增加了升压电路,输出36v电压 ,可为需要高压供电的板子烧写程序。其中单片机程序只需要在stc烧写软件里面点“将用...
功能介绍: 采用STC8F1K08S2单片机,能够测量甲醛、温湿度、PM2.5。 使用0.96寸OLED显示测量数据 具有报警功能:蜂鸣器报警和LED报...

基于STC8的NRF24L01无线发射和接收报警电路设计原理图
使用逻辑芯片,使线圈和电容形成震荡(频率35~70KHz).当有顺磁金属靠近线圈的时候,线圈停止震荡。单片机检测到震荡消失。通过NRF24L01无线2....

STC8单片机扩展WiFi通信实现功能与组态王组态软件详细组态
STC8单片机扩展WiFi通信模块和组态王组态软件实现Modbus TCP以太网通信 一、通信实现功能: 1、Modbus TCP Client:组态王...
MAX232转换板出口接三条线到STC单片机RXD,TXD和GND,单片机未通电,但这时RXD上有电,电反灌到单片机上,于是单片机就运行了!
华为日前宣布,已于近日与沙特电信公司(Saudi Telecom Company,简称STC)达成一项商用合作,华为将提供五频天线助力STC建设TDD/...
2017-12-05 标签:STC 741 0
| 型号 | 描述 | 数据手册 | 参考价格 |
|---|---|---|---|
| STC8A4K60S2A12-28I-LQFP48 | CPU内核:51系列;CPU最大主频:-;程序存储容量:128KB;程序存储器类型:FLASH;RAM总容量:4KB;GPIO端口数量:-; |
获取价格
|
|
| STC8A8K64D4-45I-LQFP44 | 16位MCU单片机 LQFP44_10X10MM Vi=1.9V~5.5V -40℃~+85℃ |
获取价格
|
|
| STC89LE52RC-40I-LQFP44 | CPU内核:51系列 工作电压范围:2V~3.6V 程序存储容量:8KB 程序存储器类型:FLASH RAM总容量:512Byte GPIO端口数量:39 LQFP44_10X10MM |
获取价格
|
|
| STC12C5A32S2-35I | 16位MCU单片机 |
获取价格
|
|
| STC8H8K64U-45I-TSSOP20 | 8位MCU单片机 8050内核1T,1.9V~5.5V,45个I/O口,TSSOP20 |
获取价格
|
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS | harmonyos |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1