完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > SVPWM

SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。
SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。传统的SPWM方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
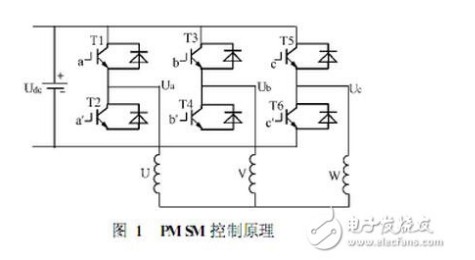
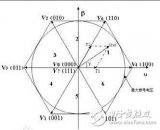
普通的三相全桥是由六个开关器件构成的三个半桥。这六个开关器件组合起来(同一个桥臂的上下半桥的信号相反)共有8种安全的开关状态。 其中000、111(这里是表示三个上桥臂的开关状态)这两种开关状态在电机驱动中都不会产生有效的电流。因此称其为零矢量。另外6种开关状态分别是六个有效矢量。它们将360度的电压空间分为60度一个扇区,共六个扇区,利用这六个基本有效矢量和两个零量,可以合成360度内的任何矢量。
当要合成某一矢量时先将这一矢量分解到离它最近的两个基本矢量,而后用这两个基本矢量去表示,而每个基本矢量的作用大小就利用作用时间长短去代表。用电压矢量按照不同的时间比例去合成所需要的电压矢量。从而保证生成电压波形近似于正弦波。
在变频电机驱动时,矢量方向是连续变化的,因此我们需要不断的计算矢量作用时间。为了计算机处理的方便,在合成时一般是定时器计算(如每0.1ms计算一次)。这样我们只要算出在0.1ms内两个基本矢量作用的时间就可以了。由于计算出的两个时间的总和可能并不是0.1ms(比这小),而那剩下的时间就按情况插入合适零矢量。 由于在这样处理时,合成的驱动波形和PWM很类似。因此我们还叫它PWM,又因这种PWM是基于电压空间矢量去合成的,所以就叫它SVPWM了。
SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。传统的SPWM方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
普通的三相全桥是由六个开关器件构成的三个半桥。这六个开关器件组合起来(同一个桥臂的上下半桥的信号相反)共有8种安全的开关状态。 其中000、111(这里是表示三个上桥臂的开关状态)这两种开关状态在电机驱动中都不会产生有效的电流。因此称其为零矢量。另外6种开关状态分别是六个有效矢量。它们将360度的电压空间分为60度一个扇区,共六个扇区,利用这六个基本有效矢量和两个零量,可以合成360度内的任何矢量。
当要合成某一矢量时先将这一矢量分解到离它最近的两个基本矢量,而后用这两个基本矢量去表示,而每个基本矢量的作用大小就利用作用时间长短去代表。用电压矢量按照不同的时间比例去合成所需要的电压矢量。从而保证生成电压波形近似于正弦波。
在变频电机驱动时,矢量方向是连续变化的,因此我们需要不断的计算矢量作用时间。为了计算机处理的方便,在合成时一般是定时器计算(如每0.1ms计算一次)。这样我们只要算出在0.1ms内两个基本矢量作用的时间就可以了。由于计算出的两个时间的总和可能并不是0.1ms(比这小),而那剩下的时间就按情况插入合适零矢量。 由于在这样处理时,合成的驱动波形和PWM很类似。因此我们还叫它PWM,又因这种PWM是基于电压空间矢量去合成的,所以就叫它SVPWM了。

所谓SPWM,就是在PWM的基础上改变了调制脉冲方式,脉冲宽度时间占空比按正弦规律排列,这样输出波形经过适当的滤波可以做到正弦波输出。它广泛地用于直流交...

PAM是英文PulseAmplitudeModulation(脉冲幅度调制)缩写,是按一定规律改变脉冲列的脉冲幅度,以调节输出量值和波形的一种调制方式...
在任何时刻,所产生的磁链增量的方向决定于所施加的电压,其幅值则正比于施加电压的时间。
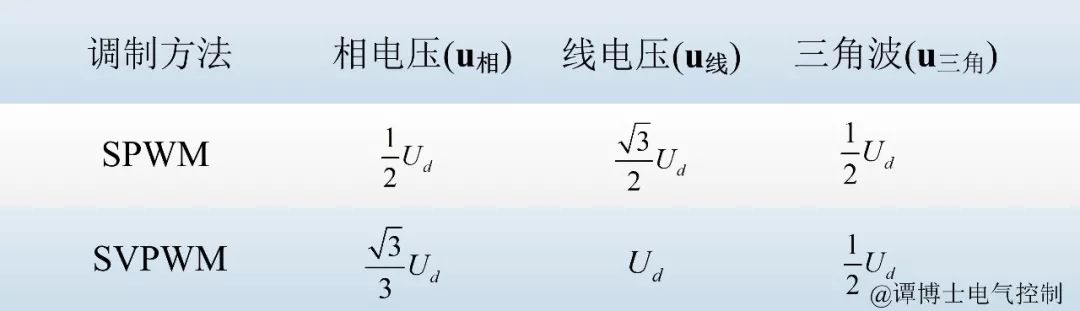
学习调制方法时,**调制比**与**电压利用率**是个重要的概念。我发现教材中却对这两个内容介绍的很模糊,网上也没有很多包含具体推导过程的公式。
SVPWM是一种基于矢量控制的功率电子调制技术,与FOC不同的是,SVPWM通过调节电压幅值和相位角度控制电机转矩和速度,其工作原理是将固定幅值的三相交...
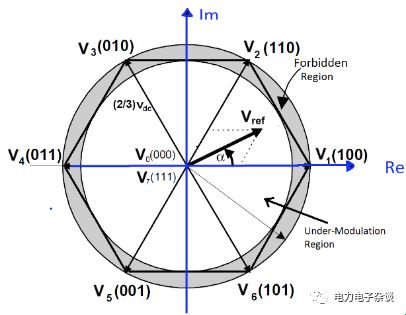
通常,我们用的SVPWM是在上图中的白色内圆里,输出的相电压幅值能到Vdc/sqrt(3)。这块区域叫线性区,线性的意思是给定电压和输出电压完全成比例关系。
SVPWM控制技术的基本原理及Matlab/Simulink仿真分析
本章节首先介绍SVPWM控制技术的原理,然后详细分析SVPWM控制算法的具体实现方式包括7段式SVPWM与5段式SVPWM算法,并通过Matlab/Si...
SVPWM的实现在前期的文章中已经详细地介绍过了,这里就不再阐述。现在主要说说五段式SVPWM和七段式SVPWM的实现的区别。
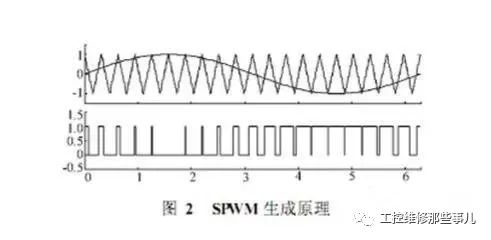
所谓SPWM,就是在PWM的基础上改变了调制脉冲方式,脉冲宽度时间占空比按正弦规律排列,这样输出波形经过适当的滤波可以做到正弦波输出。
SVPWM 是近年发展的一种比较新颖的控制方法,是由3 三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近...
2017-10-28 标签:svpwm 1.8万 0
PWM技术作为电力电子装置的核心技术,被广泛的应用于变频调速电机传动中,电机控制的最终目的是产生圆形旋转磁场,从而产生恒定的电磁转矩。在众PWM调制方法...
SVPWM SVPWM是空间矢量脉宽调制(Space Vector Pulse Width Modulation)的简称,通常由三相逆变器的六个功率开关...
SVPWM调制直接着眼于如何使负载电机获得圆形旋转磁场,这与现代电机控制常用的磁场定向控制的思路高度吻合,因此在电机控制领域获得了广泛的应用
引言 基于正弦波的永磁同步电机(简称PMSM)具有功率密度大、效率高、转子损耗小等优点,在运动控
本文描述一个应用于光伏并网发电系统,采用直接电流控制的三相电压源型PWM并网逆变器的设计过程,并对逆变器的控制策略进行了分析和研究,并采用三菱公司的智能...
电机控制器策略开发,应用层软件,在售车型最新版本软件。按照ASPIC 开发流程开发,基于AUTOSAR架构开发,满足功能安全ASIL C。

传统的SVPWM算法,因其涉及较多的扇区判断、三角函数计算和平方根运算,其算法较为复杂。在此首先分析了基于分类算法的SVPWM的基本原理及其在计算效率上...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1