完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 多线程

多线程(英语:multithreading),是指从软件或者硬件上实现多个线程并发执行的技术。具有多线程能力的计算机因有硬件支持而能够在同一时间执行多于一个线程,进而提升整体处理性能。
多线程(英语:multithreading),是指从软件或者硬件上实现多个线程并发执行的技术。具有多线程能力的计算机因有硬件支持而能够在同一时间执行多于一个线程,进而提升整体处理性能。具有这种能力的系统包括对称多处理机、多核心处理器以及芯片级多处理(Chip-level multithreading)或同时多线程(Simultaneous multithreading)处理器。在一个程序中,这些独立运行的程序片段叫作“线程”(Thread),利用它编程的概念就叫作“多线程处理(Multithreading)”。具有多线程能力的计算机因有硬件支持而能够在同一时间执行多于一个线程(台湾译作“执行绪”),进而提升整体处理性能。
多线程(英语:multithreading),是指从软件或者硬件上实现多个线程并发执行的技术。具有多线程能力的计算机因有硬件支持而能够在同一时间执行多于一个线程,进而提升整体处理性能。具有这种能力的系统包括对称多处理机、多核心处理器以及芯片级多处理(Chip-level multithreading)或同时多线程(Simultaneous multithreading)处理器。在一个程序中,这些独立运行的程序片段叫作“线程”(Thread),利用它编程的概念就叫作“多线程处理(Multithreading)”。具有多线程能力的计算机因有硬件支持而能够在同一时间执行多于一个线程(台湾译作“执行绪”),进而提升整体处理性能。
硬件支持
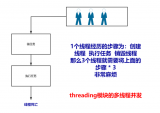
多线程硬件支持的目标,即支持快速进行就绪态线程、执行态线程间的切换。为达成这个目标,需要硬件实现保存、恢复程序看得见的寄存器以及一些对程序执行有影响的控制寄存器(如程序计数器PC、程序状态寄存器SR)。从一个线程切换到另一个线程对硬件来讲意味着保存当前线程的一组寄存器的值,并恢复即将执行线程的一组寄存器的值。
新增这些功能的硬件有以下优势:
线程切换能够在一个 CPU 周期内完成(有些硬件甚至没有开销,上个周期在运行线程A,下个周期就已在运行线程B)。
每个线程看起来就像是独自运行的,即没有与其他线程共享硬件资源。对操作系统来说,通常每个线程都被视做独占一个处理器,这样将简化系统软件的设计(尤其是对于支持多线程的操作系统)。
为了在各个线程间有效率的进行切换,每个线程需要保存自己的一组寄存器集(register set)。有些硬件设计成每个处理器核心具有两组寄存器文件,以实现在多个线程间快速切换。
多线程有什么用?
这么解释问题吧:
1。单进程单线程:一个人在一个桌子上吃菜。
2。单进程多线程:多个人在同一个桌子上一起吃菜。
3。多进程单线程:多个人每个人在自己的桌子上吃菜。
多线程的问题是多个人同时吃一道菜的时候容易发生争抢,例如两个人同时夹一个菜,一个人刚伸出筷子,结果伸到的时候已经被夹走菜了。。。此时就必须等一个人夹一口之后,在还给另外一个人夹菜,也就是说资源共享就会发生冲突争抢。
1。对于 Windows 系统来说,【开桌子】的开销很大,因此 Windows 鼓励大家在一个桌子上吃菜。因此 Windows 多线程学习重点是要大量面对资源争抢与同步方面的问题。
2。对于 Linux 系统来说,【开桌子】的开销很小,因此 Linux 鼓励大家尽量每个人都开自己的桌子吃菜。这带来新的问题是:坐在两张不同的桌子上,说话不方便。因此,Linux 下的学习重点大家要学习进程间通讯的方法。
--
补充:有人对这个开桌子的开销很有兴趣。我把这个问题推广说开一下。
开桌子的意思是指创建进程。开销这里主要指的是时间开销。
可以做个实验:创建一个进程,在进程中往内存写若干数据,然后读出该数据,然后退出。此过程重复 1000 次,相当于创建/销毁进程 1000 次。在我机器上的测试结果是:
UbuntuLinux:耗时 0.8 秒
Windows7:耗时 79.8 秒
两者开销大约相差一百倍。
这意味着,在 Windows 中,进程创建的开销不容忽视。换句话说就是,Windows 编程中不建议你创建进程,如果你的程序架构需要大量创建进程,那么最好是切换到 Linux 系统。
大量创建进程的典型例子有两个,一个是 gnu autotools 工具链,用于编译很多开源代码的,他们在 Windows 下编译速度会很慢,因此软件开发人员最好是避免使用 Windows。另一个是服务器,某些服务器框架依靠大量创建进程来干活,甚至是对每个用户请求就创建一个进程,这些服务器在 Windows 下运行的效率就会很差。这“可能”也是放眼全世界范围,Linux 服务器远远多于 Windows 服务器的原因。
--
再次补充:如果你是写服务器端应用的,其实在现在的网络服务模型下,开桌子的开销是可以忽略不计的,因为现在一般流行的是按照 CPU 核心数量开进程或者线程,开完之后在数量上一直保持,进程与线程内部使用协程或者异步通信来处理多个并发连接,因而开进程与开线程的开销可以忽略了。
另外一种新的开销被提上日程:核心切换开销。
现代的体系,一般 CPU 会有多个核心,而多个核心可以同时运行多个不同的线程或者进程。
当每个 CPU 核心运行一个进程的时候,由于每个进程的资源都独立,所以 CPU 核心之间切换的时候无需考虑上下文。
当每个 CPU 核心运行一个线程的时候,由于每个线程需要共享资源,所以这些资源必须从 CPU 的一个核心被复制到另外一个核心,才能继续运算,这占用了额外的开销。换句话说,在 CPU 为多核的情况下,多线程在性能上不如多进程。
因而,当前面向多核的服务器端编程中,需要习惯多进程而非多线程。

Python作为一种高级编程语言,提供了多种并发编程的方式,其中多线程与多进程是最常见的两种方式之一。在本文中,我们将探讨Python中多线程与多进程的...
作者:京东科技 文涛 全文较长共6468字,语言通俗易懂,是一篇具有大纲性质的关于多线程的梳理,作者从历史演进的角度讲了多线程相关知识体系,让你知其然知...
自旋锁和互斥锁是两种常见的同步机制,用于在多线程程序中保护共享资源。它们的主要区别在于等待锁的方式和适用场景。 自旋锁 自旋锁(Spinlock)是一种...

鸿蒙OS开发实例:【ArkTS类库多线程@Concurrent装饰器校验并发函数】
在使用TaskPool时,执行的并发函数需要使用该装饰器修饰,否则无法通过相关校验。从API version 9开始,该装饰器支持在ArkTS卡片中使用。

鸿蒙OS开发实例:【ArkTS类库多线程CPU密集型任务TaskPool】
CPU密集型任务是指需要占用系统资源处理大量计算能力的任务,需要长时间运行,这段时间会阻塞线程其它事件的处理,不适宜放在主线程进行。例如图像处理、视频编...
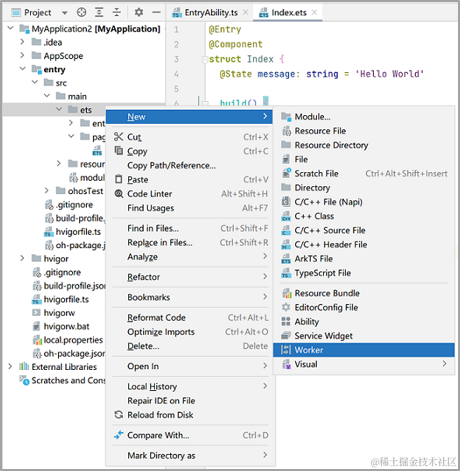
鸿蒙OS开发案例:【ArkTS类库多线程CPU密集型任务Worker】
通过某地区提供的房价数据训练一个简易的房价预测模型,该模型支持通过输入房屋面积和房间数量去预测该区域的房价,模型需要长时间运行,房价预测需要使用前面的模...
鸿蒙OS开发实例:【ArkTS类库多线程I/O密集型任务开发】
使用异步并发可以解决单次I/O任务阻塞的问题,但是如果遇到I/O密集型任务,同样会阻塞线程中其它任务的执行,这时需要使用多线程并发能力来进行解决。 ...

神经网络能加速的有很多,当然使用硬件加速是最可观的了,而目前除了专用的NPU(神经网络加速单元),就属于GPU对神经网络加速效果最好了
使用RISC-V进行高效数据处理的方法涉及多个方面,包括处理器内核与DSA(领域特定加速器)之间的通信优化、内存管理优化、多线程性能提升等。以下是一些具...
在数字时代,算力,在加速千行百业的发展中成为了生产力的源泉。AMD秉承一路创新的精神,一直关注客户所需,专注于打造业内一流的数据中心处理器,为众多行...
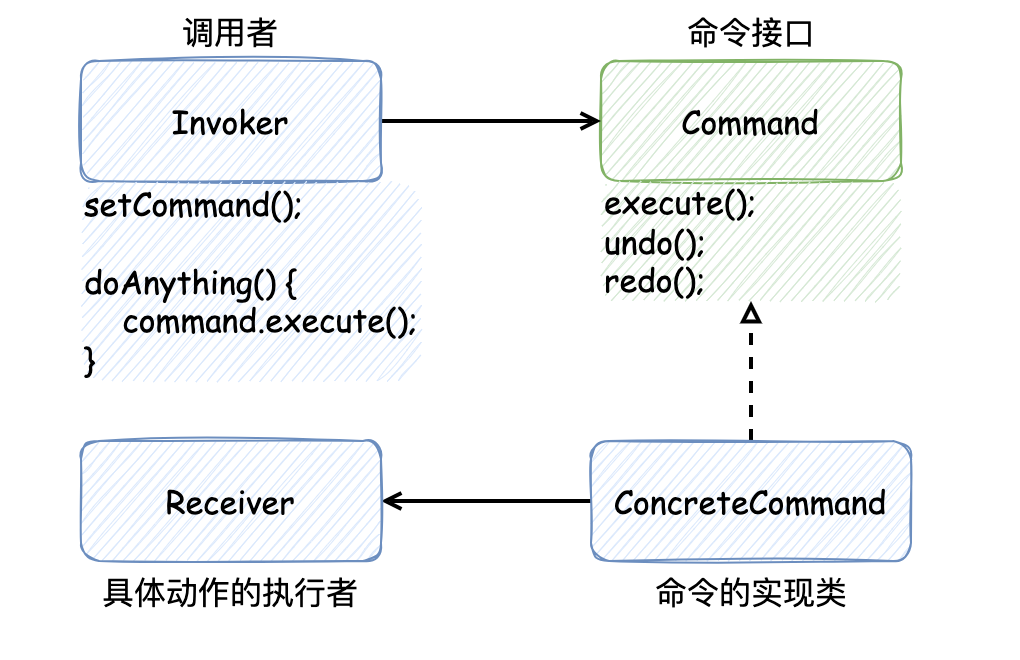
从多线程设计模式到对 CompletableFuture 的应用
最近在开发 延保服务 频道页时,为了提高查询效率,使用到了多线程技术。为了对多线程方案设计有更加充分的了解,在业余时间读完了《图解 Java 多线程设计...
CPU 性能方面,第三代骁龙 8s 平台搭载高通 Kryo CPU,沿袭全新 CPU 架构,包括 1 个 3.0GHz 的超级内核、4 个 2.8GHz...
Java实现多线程的几种方式 多线程是指程序中包含了两个或以上的线程,每个线程都可以并行执行不同的任务或操作。Java中的多线程可以提高程序的效率和性能...
你还是分不清多进程和多线程吗?一文搞懂! 多进程和多线程是并发编程中常见的两个概念,它们都可以用于提高程序的性能和效率。但是它们的实现方式和使用场景略有...
这表明在IPC性能方面,龙芯3A6000处理器超出了i3-10100F至少30%以上,差不多可以媲美13代酷睿处理器。
天玑7200和天玑1100哪个好?天玑7200和天玑8200哪个好?
天玑7200和天玑1100哪个好? 天玑7200好一些。联发科天玑 7200 采用第二代台积电 4 纳米工艺,与天玑 9200 系列相同。配备了两个峰值...
可以发现子线程组执行时,有一个线程执行失败,其他线程也会抛出异常,但是主线程中执行的删除操作,没有回滚,@Transactional注解没有生效。
$ python3 PmWebDirScan.py -u "baidu.com" -d "专业备份扫描.txt,综合目录....
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

