完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 导航

导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。 导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。这也是用于导航员执行导航任务所使用的专业知识的艺术术语。
导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。 导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。这也是用于导航员执行导航任务所使用的专业知识的艺术术语。 所有导航技术都涉及定位与已知位置或模式相比较的导航仪的位置。在更广泛的意义上,导航可以指涉及确定位置和方向的任何技能或研究。在这个意义上,导航包括定向运动和行人导航。
导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。 导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。这也是用于导航员执行导航任务所使用的专业知识的艺术术语。 所有导航技术都涉及定位与已知位置或模式相比较的导航仪的位置。在更广泛的意义上,导航可以指涉及确定位置和方向的任何技能或研究。在这个意义上,导航包括定向运动和行人导航。
纬度
大体上,地球上的一个地方的纬度是赤道北或南的角度。 纬度通常用度数(标记为°)表示,从赤道0°到北极和南极90°。 北极的纬度为90°N,南极的纬度为90°。[8] 水手通过用六分仪瞄准北极北极星并使用视力减小表来校正眼睛的高度和大气折射,计算北半球的纬度。 在地平线以上的北极星座的高度是观察者的纬度,在一定程度以内。
经度
与纬度类似,地球上的一个地方的经度是原始子午线或格林威治子午线的东西或以西的角距。经度通常以从格林威治子午线0°到东西方向180°的度数(标记为°)表示。例如,悉尼东部的经度约为151度。纽约市西经74度。对于绝大多数的历史,海员们努力确定经度。如果瞄准的精确时间已知,可以计算经度。缺乏这一点,人们可以使用六分仪来测量月球距离(也称为月球观测,或简称“月球”),使用航海年历可以用于计算零经度时间(见格林尼治标准时间) 。可靠的海洋计时器直到十八世纪末都不可用,直到19世纪才能承受。大约一百年,从大约1767年到大约1850年,缺少一个计时码表的水手使用月球距离的方法来确定格林威治时间找到他们的经度。带有计时器的水手可以使用格林威治时间的月球测定来检查其阅读。
恒向线
在导航中,一条垂直线(或变态曲线)是以相同角度穿过所有经度的经线,即从定义的初始方位得到的路径。 也就是说,在采取初始方位时,沿着相同的方位进行,而不改变相对于真或北极测量的方向。


边坡失稳引发的滑坡、崩塌等地质灾害突发性强、破坏力大,一旦发生意外事故,就可能带来惨痛的损失。近期,高速公路边坡安全防治,成为公路安全管理的重点工作,如...
本文提出了一种将视觉语言模型(VLM)转换为端到端导航策略的具体框架。不依赖于感知、规划和控制之间的分离,而是使用VLM在一步中直接选择动作。惊讶的是,...

自主移动机器人(AMR)可帮助制造商提高生产效率、增强安全性并节省大量成本,因而在各行各业得到广泛应用。2022年全球AMR市场规模为86.5亿美元,预...

什么是室内地图?室内地图是一种呈现室内空间布局和结构的地图,通常用于指引人们在室内空间中的位置以及帮助他们找到目的地。室内地图通过数字化手段将建筑、房间...
经纬仪是一种测量角度的仪器,通常用于测量地球上的地理位置、地理方位和导航。它有着广泛的应用,包括在航海、地理勘测、建筑测量、地震研究等领域。下面是经纬仪...
取消点向导是指取消某个位置或地点的导航指引。在AD20中,取消点向导有两种方法:一种是取消特定位置的导航指引,另一种是取消整个地点的导航指引。 首先,我...
VEnus算法对于反光柱导航的基本思路,其主要分为了高反点提取、高反点聚类查找中心、高反点与已知反光柱位姿匹配以及调用ceres库进行位姿优化等步骤。
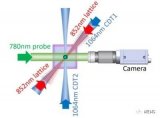
Infleqtion在2023年德国慕尼黑光电展览会(LASER-World of Photonics)的“量子世界(World of Quantum)...
1. 概述 在进行代码分析之前,了解Mahony滤波器的原理和公式推导是必要的。Mahony滤波器是一种基于四元数的姿态估计滤波器,其主要思想是通过...
近期,澳大利亚的一支科研团队带来了一项突破性的创新——一种全新的天文导航系统。该系统巧妙地运用星体作为参照,实时追踪无人机的位置变化,从而实现精准定位。...
近日,高德地图与长城汽车在河北举行出行联合创新LAB揭牌仪式,双方将围绕导航出行领域展开深度合作,共创未来用户智慧出行新体验。与此同时,基于高德地图Au...

传音导航定位技术获国际顶尖学府权威认证,重塑多场景高精度定位体验
随着全球导航卫星系统(GlobalNavigationSatelliteSystem,GNSS)的发展,导航定位已经成为智能手机不可或缺的功能,广泛应用...
近日,百度IDG部门负责人李涛通过内部通讯平台发布了一则重要声明,针对极越汽车用户所关切的问题进行了详细解答和说明。 李涛在声明中明确指出,百度将一如既...
卡尔曼滤波的基本原理 卡尔曼滤波是一种基于贝叶斯滤波的算法,它通过结合预测和更新两个步骤来估计系统的状态。算法的核心在于最小化估计误差的方差,从而提供最...

近日,移远通信正式对外重磅发布其精心打造的北斗高精度农机导航自动驾驶系统——远征FMA310。该系统深度融合了多种移远前沿方案以及高性能模组的核心优势,...
近日,特斯拉在美国遭遇了新的法律挑战。一家名为Granite Vehicle Ventures的公司,在美国德州东区地方法院对特斯拉提起诉讼,指控其全自...
毫米波雷达的基频和调制技术 毫米波雷达的基频通常指的是其工作频段,一般在30GHz至300GHz之间。在这个频段内,毫米波雷达能够利用短波波长的电磁波进...
作为两家公司长期合作的一部分,TomTom的导航、地图和交通数据将为依维柯的商用车提供动力。 基于TomTom的专业知识,依维柯为客户提供增强的导航解决...
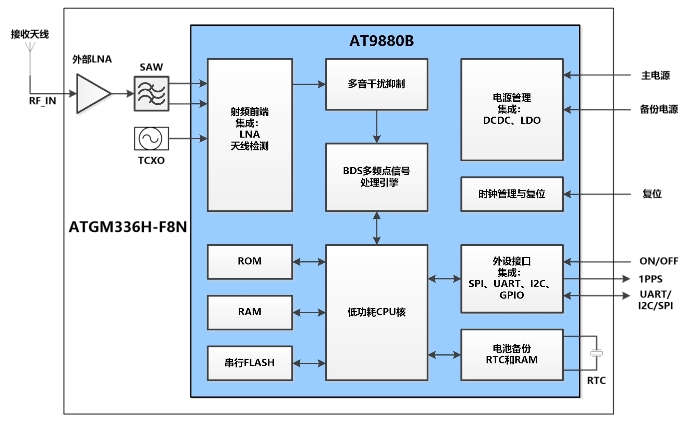
ATGM332D-F8N:高性能单北斗多频定位导航模块数据手册
一、ATGM332D-F8N概述: 1、ATGM332D-F8N系列模块是12.2×16mm尺寸的高性能单北斗多频定位导航模块。该系列模块产品基于中科微...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1


