完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 照相机
照相机是一种利用光学成像原理形成影像并使用底片记录影像的设备,是用于摄影的光学器械。在现代社会生活中有很多可以记录影像的设备,它们都具备照相机的特征,比如医学成像设备、天文观测设备等。
照相机是一种利用光学成像原理形成影像并使用底片记录影像的设备,是用于摄影的光学器械。在现代社会生活中有很多可以记录影像的设备,它们都具备照相机的特征,比如医学成像设备、天文观测设备等。被摄景物反射出的光线通过照相镜头(摄景物镜)和控制曝光量的快门聚焦后,被摄景物在暗箱内的感光材料上形成潜像,经冲洗处理(即显影、定影)构成永久性的影像,这种技术称为摄影术,分为一般照相与专业摄像。
照相机是一种利用光学成像原理形成影像并使用底片记录影像的设备,是用于摄影的光学器械。在现代社会生活中有很多可以记录影像的设备,它们都具备照相机的特征,比如医学成像设备、天文观测设备等。被摄景物反射出的光线通过照相镜头(摄景物镜)和控制曝光量的快门聚焦后,被摄景物在暗箱内的感光材料上形成潜像,经冲洗处理(即显影、定影)构成永久性的影像,这种技术称为摄影术,分为一般照相与专业摄像。
工作原理
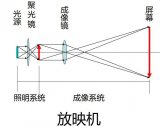
照相机品种繁多,按用途可分为风光摄影照相机、印刷制版照相机、文献缩微照相机、显微照相机、水下照相机、航空照相机、高速照相机等;按照相胶片尺寸,可分为110照相机(画面13×17毫米)、126照相机(画面28×28毫米)、135照相机(画面24×18,24×36毫米)、127照相机(画面45x45毫米)、120照相机(包括220照相机,画面60×45,60×60,60×90毫米)、圆盘照相机(画面8.2x10.6毫米);按取景方式分为透视取景照相机、双镜头反光照相机、单镜头反光照相机。任何一种分类方法都不能包括所有的照相机,对某一照相机又可分为若干类别,例如135照相机按其取景、快门、测光、输片、曝光、闪光灯、调焦、自拍等方式的不同 ,就构成一个复杂的型谱。照相机利用光的直线传播性质和光的折射与反射规律,以光子为载体,把某一瞬间的被摄景物的光信息量,以能量方式经照相镜头传递给感光材料,最终成为可视的影像。照相机的光学成像系统是按照几何光学原理设计的,并通过镜头,把景物影像通过光线的直线传播、折射或反射准确地聚焦在像平面上。摄影时,必须控制合适的曝光量,也就是控制到达感光材料上的合适的光子量。因为银盐感光材料接收光子量的多少有一限定范围,光子量过少形不成潜影核,光子量过多形成过曝,图像又不能分辨。照相机是用光圈改变镜头通光口径大小,来控制单位时间到达感光材料的光子量,同时用改变快门的开闭时间来控制曝光时间的长短。从完成摄影的功能来说,照相机大致要具备成像、曝光和辅助三大结构系统。成像系统包括成像镜头、测距调焦、取景系统、附加透镜、滤光镜、效果镜等;曝光系统包括快门机构、光圈机构、测光系统、闪光系统、自拍机构等;辅助系统包括卷片机构、计数机构、倒片机构等。镜头是用以成像的光学系统,由一系列光学镜片和镜筒所组成,每个镜头都有焦距和相对口径两个特征数据;取景器是用来选取景物和构图的装置,通过取景器看到的景物,凡能落在画面框内的部分,均能拍摄在胶片上 ;测距器可以测量出景物的距离,它常与取景器组合在一起,通过连动机构可将测距和镜头调焦联系起来,在测距的同时完成调焦。光学透视或单镜头反光式取景测距器都须手动操作,并用肉眼判断。此外还有光电测距、声纳测距、红外线测距等方法,可免除手动操作,又能避免肉眼判断带来的误差,以实现自动测距。快门是控制曝光量的主要部件,最常见的快门有镜头快门和焦平面快门两类。镜头快门是由一组很薄的金属叶片组成,在主弹簧的作用下,连杆和拨圈的动作使叶片迅速地开启和关闭 ;焦平面快门是由两组部分重叠的帘幕(前帘和后帘)构成,装在焦平面前方附近。两帘幕按先后次序启动,以便形成一个缝隙。缝隙在胶片前方扫过,以实现曝光。光圈又叫光阑,是限制光束通过的机构,装在镜头中间或后方。光圈能改变光路口径,并与快门一起控制曝光量。常见的光圈有连续可变式和非连续可变式两种。自拍机构是在摄影过程中起延时作用,以供摄影者自拍的装置。使用自拍机构时,首先释放延时器,经延时后再自动释放快门。自拍机构有机械式和电子式两种,机械式自拍机构是一种齿轮传动的延时机构,一般可延时8~12秒 ;电子式自拍机构利用一个电子延时线路控制快门释放。[2]
结构和元件
通常,照相机主要元件包括:成像元件、暗室、成像介质与成像控制结构。成像元件可以进行成像。通常是由光学玻璃制成的透镜组,称之为镜头。小孔、电磁线圈等在特定的设备上都起到了“镜头”的作用。成像介质则负责捕捉和记录影像。包括底片、CCD、CMOS等。暗室为镜头与成像介质之间提供一个连接并保护成像介质不受干扰。控制结构可以改变成像或记录影像的方式以影像最终的成像效果。光圈、快门、聚焦控制等。[2]
成像过程
传统相机成像1.镜头把景物影象聚焦在胶片上2、片上的感光剂随光发生变化3.片上受光后变化了的感光剂经显影液显影和定影4. 形成和景物相反或色彩互补的影象5. 所形成的像是实像[2]
数码相机成像1.经过镜头光聚焦在CCD或CMOS上2.CCD或CMOS将光转换成电信号3.经处理器加工,记录在相机的内存上4.通过电脑处理和显示器的电光转换,或经打印机打印便形成影象。具体过程:光线从镜头进入相机,CCD进行滤色、感光(光电转化),按照一定的排列方式将拍摄物体“分解”成了一个一个的像素点,这些像素点以模拟图像信号的形式转移到“模数转换器”上,转换成数字信号,传送到图像处理器上,处理成真正的图像,之后压缩存储到存储介质中。对胶片相机而言,景物的反射光线经过镜头的会聚,在胶片上形成潜应影,这个潜影是光和胶片上的乳剂产生化学反应的结果。再经过显影和定影处理就形成了影像。数码相机是通过光学系统将影像聚焦在成像元件CCD/ CMOS 上,通过A/D转换器将每个像素上光电信号转变成数码信号,再经DSP处理成数码图像,存储到存储介质当中。

HDR是英文High Dynamic Range的缩写,指的是高动态范围。对于照相机或是电视等显示设备来说,它能够提供比传统技术更广泛的亮度范围和更好的...

相对于宏观物体来说,微观世界的物质(原子、分子)运动的速度更快,为了研究这种运动,科学家们发明了飞秒激光,光脉冲的持续时间短至10-15秒,我们终于可以...
透射电镜图像分为试样的显微像和衍射花样,这两种像分别为不同电子成像,前者是透射电子成像,后者为散射电子成像。

所有的摄像机镜头均是螺纹口的,CCD摄像机的镜头安装有两种工业标准,即C安装座和CS安装座。两者螺纹部分相同,但两者从镜头到感光表面的距离不同。
一般的化学反应是在经过能量高的中间状态,即所谓的“活性化状态”后进行。活性化状态的存在早在1889年已由化学家阿雷尼厄斯从理论上预言,但是因为是在极短瞬...
标准镜头的焦距以相机成像面的画 幅对角线长度为准,当镜头焦距接近某 类相机成像面的画幅对角线长度时被称 为该类相机的标准焦距镜头,简称标准 镜头或标头。...
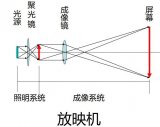
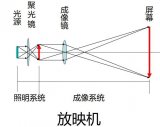
投影仪的关键参数 亮度:家用一般 2000-3000 ANSI 流明(辐射光学部分细讲) 标准分辨率(真实分辨率或物理分辨率) 对比度:明暗区域最亮的白...
标准镜头的焦距以相机成像面的画 幅对角线长度为准,当镜头焦距接近某 类相机成像面的画幅对角线长度时被称 为该类相机的标准焦距镜头,简称标准 镜头或标头。
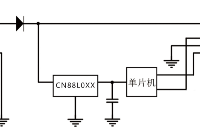
当前文章介绍基于STM32设计的门禁照相机,本项目提供了一种更加智能、安全、便捷的门禁解决方案。门禁照相机采用STM32F103ZET6 MCU作为主控...

基于Hi3516开发板,使用OpenHarmony3.0-LTS开发的应用。通过获取摄像头数据,实现预览拍照以及路视频等功能。并且通过后台AI服务识别唤...
2024-04-18 标签:照相机鸿蒙OpenHarmony 517 0
STM32F20x系列是基于工作频率高达120MHz的高性能ARM®Cortex™-M3 32位RISC内核。 该系列整合了高速嵌入式存储器,Flas...

拼经济、拓市场。上周,成都36家企业组团“出海”,飞赴德国法兰克福,抢抓海外订单。参与此次“出海”活动的36家企业,经成都市经信局前期公开征集,分别来自...

引言 所谓3D视觉定位指的是根据事先构建的3D模型及相关信息,计算取得某张图像在拍摄时相机的位置和姿态。这是3D视觉的一项十分重要的技术,可以用来帮助实...
数码照相机3D模型H5三维建模vr线上展示运用三维技术打造真实、立体、360度/720度展示照相机产品以及对客户推送沉浸式的照相机数码产品体验。商迪3D...
10月14日,佳能发布单眼望远照相机PowerShot ZOOM。它是一款新概念相机,适用于远距离拍摄。
BQM-34型无人机采用了中单翼带尾翼的正常气动布局,发动机位于机腹靠前部位,进气口在飞机下颌处,整个飞机起来很像一架取消了驾驶舱的T-2“橡树”教练机...
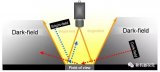
机器视觉检测对于消除瑕疵,模糊,碎屑或凹陷等产品缺陷,以确保产品的功能和性能至关重要。因此已经被广泛用于各大行业的产品缺陷检测、尺寸检测中。如利用视觉系...
据消息报道,微软已申请了一项被称为“深度多光谱”相机的专利。该专利有望用于未来的Surface设备上,包括Surface Duo和Neo。据介绍,微软研...
深圳海关关税处介绍,“无人机”如果按照“带照相机的飞行器”归类,就必须按“飞行器”进行监管,这样一来各国的贸易管制条件会比较严格,容易形成非关税贸易壁垒...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS | harmonyos |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1